无人机机载激光雷达在输电线路巡线中的应用
2021-01-28丁华张辉
丁 华 张 辉
(1.贵州电网有限责任公司输电运行检修分公司,贵州贵阳550002;2.中国电建集团贵州电力设计研究院有限公司,贵州贵阳550081)
0 引言
随着电网规模的迅速扩大,对于经济发展较慢的山区,大规模的输电线路长期暴露于雨雪、寒流、高温高压等环境下,给输电线路造成了巨大损害,如金具锈蚀、导线断股、绝缘子闪络等。
为了保证输电线路的安全稳定运行,各电力巡检系统都需要对输电线路进行定期巡检。
传统输电线路的巡检主要依靠人工巡线,存在巡线周期长、效率低、成本高等缺点,已不能满足大规模电网的巡线需求,而恶劣的环境、艰苦的条件也给人工巡检带来了很大的限制。
直升机的出现虽然给输电线路巡检带来了极大的便利,但是直升机需要由专业的技术人员操作,一般电力巡检公司均没有直升机,可操作性不强,同时直升机巡检需要申请空域,手续繁多,会浪费大量时间。
因此,轻便的无人机给输电线路巡检带来了质的改变,其结合激光雷达对输电线路进行点云采集,解决了机载相机无法准确得到输电线路通道内地物至电力线距离的问题[1]。
1 无人机机载激光雷达系统
1.1 无人机系统
无人机是一种可自主飞行或远程引导、不搭载人员的动力飞行器。无人机因可以搭载相机、定位系统、信息传输系统等硬件而广泛应用于紧急救灾、农业、测绘等领域。
通常情况下,无人机系统除了无人机本体外,还包括飞行控制系统、动力系统、能源系统、任务荷载设备、通信系统、地面监控站。
(1)飞行控制系统作为整个系统的核心部位,用于控制无人机的起飞、降落等各种工作状态。
(2)动力系统即发动机及相关附件设施。
(3)能源系统即为无人机系统提供电能的相关部件。
(4)任务荷载设备即根据业务需求搭载的相关软硬件设备,如气象设备、农药喷洒设备、相机等。
(5)通信系统即数据传输软硬件。
(6)地面监测站用于控制并调整无人机飞行的路线、高度、角度等参数[2]。
1.2 机载激光雷达
机载激光雷达包含了激光扫描仪、GPS、IMU、数码相机等光谱成像设备。激光扫描仪可以主动获取输电线路通道的点云数据,结合GPS定位经坐标的转换获得通道内地物的三维坐标信息。点云数据是离散不规则的点,其格式主要有两种,ASCII码纯文本和LAS格式。由于地物复杂多样[3],因此需要对点云数据进行分类处理以区别不同的地物。
机载激光雷达技术获得的地物精度准确,操作快捷迅速,在测绘行业具有重要的作用,随着软硬件技术的迅速发展,其已逐步用于地物的自动化分类。
2 输电线路激光点云的采集及数据处理
2.1 激光点云数据采集
(1)点云数据采集的前期准备工作包括实地踏勘、航线设计等。
1)实地踏勘的目的是详细了解测区的情况,如测区边界、地形地貌、交通情况等。
2)航线设计遵循高效、经济的原则,在实地踏勘的基础上,根据已有地形图并按照需求方的要求、行业规范及实地具体天气情况,制定详细的航飞路线、航飞计划及人员安排计划。随着点云数据采集的进行,航飞设计要不断变化更新,以保质保量地完成数据采集工作。
(2)点云数据的采集包括控制测量、数据采集、补测等。
1)控制测量的目的是通过选点埋石、网型的设计及测量、数据的解析等建立点云数据的坐标基准。
2)数据采集包括设备安装、设备检查、试飞爬升、自主巡航、返回降落。其中设备检查是为了确保外业数据采集的顺利完成,主要包括无人机设备外形、零部件及性能的检查以及激光雷达设备的供能设备检查。
3)补测是在对外业采集的数据进行检查的基础上,对漏飞、点云密度不符合要求的区域进行补飞测量。
2.2 点云数据处理
点云数据处理包括数据的预处理、数据的处理及分析。
(1)数据的预处理包含数据的质量检查、数据转换、轨迹解算、点云数据解算等。
1)数据质量的检查主要有检查机载雷达POS数据是否完整、点云数据是否有漏洞、前后两天时间及不同架次数据是否无缝拼接等。
2)数据转换是将地面基站和机载POS系统获取的原始数据转换成通用的数据格式。
3)轨迹解算经后差分处理获得飞行平台的三维坐标。
4)点云数据的解算是根据轨迹解算的结果与原始点云数据获得输电线路通道内点云数据的三维坐标。
(2)数据的处理包含数据的去噪、点云数据的分类、危险点分析、工况模拟分析等。
2.2.1 点云去噪
在无人机飞行过程中,输电线路通道内的地物、输电线、杆塔等的外形、材质以及空中漂浮物会造成点云数据存在部分噪声点。此外,无人机飞行过程中的减速、转弯、地面起伏等因素,也会造成点云数据存在部分噪声点。噪声点的存在会在一定程度上干扰点云数据的分类及危险点的分析。
点云去噪图如图1所示,圆圈内的点即为噪声点。

图1 点云去噪图
2.2.2 点云分类
激光雷达采集数据时,一次性采集通道内的所有目标,为了更好地区分多样地物,并根据不同地物点云测算地物至输电线路的距离与交叉跨越距离,需要进行点云分类。通常情况下,输电线路的通道点云可以分为电力线、杆塔、高植被、低植被、建筑、道路。为了区分不同目标,用不同的颜色对分类后的点云加以区分,分类方法通常采用滤波分类法。点云分类效果图如图2所示。
2.2.3 危险点分析
根据点云分类的结果分别计算导线间的交叉跨越距离、导线与地物之间的距离,并根据电网行业要求的安全距离规范,判定测算距离是否安全并划分危险点等级。为便于存档和巡检人员现场排除安全隐患,需生成危险点分析报告。
如图3所示,黑色点是测算出来的危险植被点。危险点分析报告如图4所示。
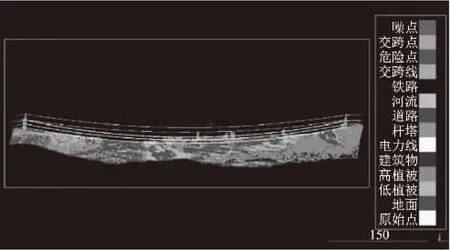
图2 点云分类效果图

图3 危险植被点图
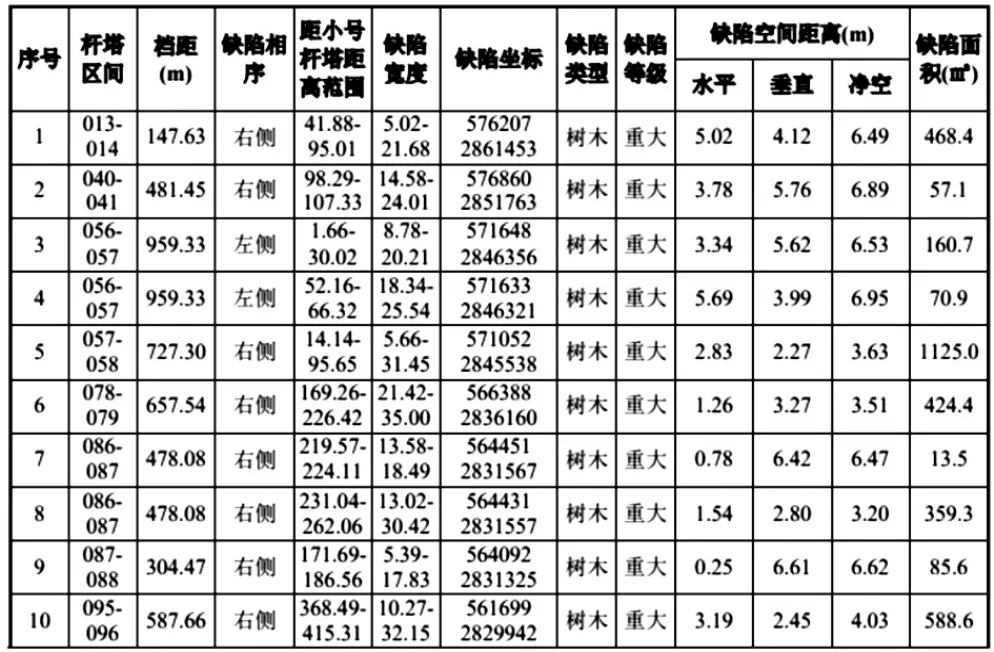
图4 危险点分析报告图
2.2.4 工况模拟分析
输电线路长期处于动态的野外环境中,环境的变化会给线路的安全运行带来巨大的威胁,如由自然环境引起的线路舞动、覆冰、风偏都会对输电线路造成损害,且在恶劣的环境下,巡检人员工作受到限制,因此需要进行工况模拟。根据悬链线方程及气温、风速等因子模拟分析线路的变化,动态评估输电线路的状态。
工况模拟结果如图5所示。
3 结语
利用无人机机载激光雷达技术对输电线路进行外业巡检,根据数据的处理分析实现点云数据的分析、危险点分析、工况模拟分析,可实现对输电线路通道的快速巡检。此技术解决了复杂地区巡检难的问题,大幅度降低了人力劳动成本,提高了巡检效率。同时,激光雷达技术实现了输电线路的三维坐标测量,且精度较高,实践证明,轻量化、成本低的无人机在电力巡检中具有重要作用。

图5 工况模拟图
