基于鲁棒滤波的细分驱动步进电机速度估计
2021-01-28霍寅龙
霍寅龙, 周 复
(1. 上海交通大学 电子信息与电气工程学院, 上海 200240;2. 上海安浦鸣志自动化设备有限公司 研发部, 上海 201107)
0 引言
混合式步进电动机(HBM)具有保持力矩大、安定性好、低速力矩大等优点,但也存在磁场饱和程度高、系统非线性强、参数难以测定[1]等问题。HBM最常见的应用是与细分驱动组成的位置开环控制系统,而速度闭环控制可进一步提升响应性能。因省去了机械位置传感器,无位置传感器估算HBM速度的方案有广泛应用前景。
以扩展Kalman滤波器(EKF)作为观测器来估算HBM转子速度的方案依赖于对象准确的数学模型,依赖准确的估算对象数学模型,对参数变化的鲁棒性较差。而HBM由于非线性过强,电感随运行状态时变剧烈等原因,更适合采用引入了鲁棒控制思想的扩展H∞滤波(EHF)观测算法。
现有的EHF估算步进电机转子状态的的方案已经证明EHF的估算精度和稳定性优于EKF[2],但是这个研究存在一定局限性。首先,研究使用简单的线性模型推导与仿真,模型不够准确,不符合步进电机电感量非线性强、变化剧烈的特点;另外,研究中扩展H∞滤波对鲁棒性的分析较为简单,对哪些变量鲁棒性强的阐述与验证不足。
本文从HBM的磁场网络模型入手,总结了非线性的两个可叠加于最简线性HBM模型中的特点,构造非线性模型。再根据其非高斯分布的过程噪声,设计了扩展H∞滤波器作为观测器估算HBM转子速度的方案,并提出参数γ、cw、cv的计算公式。该方案相比扩展Kalman滤波观测器,对电感L变化的鲁棒性更强。
1 步进驱动模型的非线性
混合式步进电机与同步电机有统一的基础数学模型,从磁网络模型分析其等效电感可以获得更精确的磁网络模型与非线性模型。将该模型与细分驱动结合,可将电机的非线性模型描述为线性模型叠加非高斯分布的系统噪声与参数不确定性的形式。
1.1 磁网络模型
与永磁同步电机类似,步进电机的基本电压平衡磁链模型[3],如式(1)。
(1)
式中,ui、ii表示相端电压与相电流;Ri表示相内阻;ei为相反电势(i=A,B);LAA、LBB表示相绕组自感;MAB、MBA为两相间绕组互感。如果不计定子极间、端部与永磁体的漏磁,忽略磁滞、涡流,忽略饱和、转矩波动和电感谐波分量[3],可得到最简线性模型的电压和转矩微分方程式,即其他分析常用的线性模型,如式(2)。
(2)
式中,ke表示反电势系数;θe、ωe表示转子电角度、电速度;L表示简化的恒定电感量。
电机绕组的电感是定转子电磁关系的定量表达,是步进电机模型非线性的主要体现。根据对两相8极步进电机的磁网络简化模型的分析,绕组电感含有转子电角度的2次谐波分量[1],反电势与速度获得自感、互感与反电势的表达式,如式(3)。
(3)
式中,L0、L2、ke表示与电机相关的常数,由绕组匝数和平均齿层磁导决定。将式(3)带入基本模型式(1),得到磁网络模型的微分方程,如式(4)。
(4)
式中,L2c=L2cos 2θe,L2s=L2sin 2θe。
由于步进电机极对数多,饱和程度高,因此电感非线性程度大。文献[4]提出了一种较准确但难于标定的非线性电感,如式(5)。
(5)
式中,L01,L21表示常数。
较准确的电感模型与磁路推导出的电感、反电势模型式(3)有相似形式,可将其看做是式(3)叠加了以相电流为变量的非线性偏置。应用鲁棒控制的观点,可将非线性偏置L01|iA|、L01|iB|、L21|iA|、L21|iB|分别看做L0、L2在对应相方程内的参数不确定性,一种结构不确定性(structured uncertainty)[5]。设计观测器的目标是增强对电感参数L的鲁棒性。
1.2 与细分驱动结合的磁网络稳态模型
细分驱动(Micro-Step)是步进电机的位置开环系统中应用最广泛的驱动方式。该驱动方式的实质是控制恒定幅值的电流矢量产生旋转磁链,带动转子旋转。因电流闭环,AB 两相实际电流合成矢量会跟随并落后电流指令矢量一个角度,称为功角。将两相实际电流写作,如式(6)。
(6)
式中,Iref表示电流指令幅值;θe表示转子位置;Δθ表示步进电机功角。当负载恒定,电机匀速旋转时,功角Δθ为恒值[6]。
将式(6)与式(3)代入式(1)后化简,得到磁网络的稳态运行电压模型,如式(7)。
(7)
式中,三次余项wA=3ωeL2Irefsin(3θe+Δθ)/L0,wB=-3ωeL2Irefcos(3θe+Δθ)/L0。
不难看出,该式与最简线性式(2)模型有相似的结构,区别是叠加了三阶分量。因此,不妨将此三次项看作最简电压模型的过程激励噪声,噪声幅值为3ωeL2Iref,而该噪声能量有界。如果将更准确的式(5)替换掉原来的式(3),代入式(1)后化简,则可以得到比式(7)更完整的混合式步进电机非线模型。该非线性模型的推导,如图1所示。

图1 非线性模型分析过程
从以上分析可知,步进电机的非线性电压模型可简化为常用的最简线性模型叠加两类干扰:(1)范围确定的电感不确定性;(2)能量有界的过程噪声。而Kalman滤波算法要求噪声符合高斯分布,不适用于处理该非线性。因此本文采用对噪声统计特征无要求的H∞鲁棒滤波器作为观测器估算转子速度,并提高对电感的鲁棒性,兼顾两类非线性的影响。
2 扩展H∞滤波观测器设计
系统为处理外部干扰与内部结构产生的不确定性,利用H∞范数的概念来设计滤波器,其目标是最小化干扰输入到滤波误差输出的H∞范数。相比于Kalman滤波器,H∞滤波器的优势在于无需对输入信号进行统计假设,而且有效折中了鲁棒性和滤波精度。
2.1 扩展H∞滤波的求解
在实际系统中,通常使用次优H∞估计,对给定正数γ,找到H∞的次优递推策略,令滤波和预测的最大能量增益||T||∞<γ。由系统增益的特性可知,当输入信号的能量是单位有界时,系统传递函数的H∞范数,即为输出的最大能量(h2范数)[7]。所以,||T||∞即是从输入u到输出y的最大能量增益,最大值设定为以γ2为上界。由于能量有上限,干扰的形状、统计特性不会对滤波输出造成过大影响。因此,H∞滤波由于γ的能量限制而对干扰具有鲁棒性,γ为H∞滤波的特征性参数。
扩展H∞滤波适用于如下非线性离散系统,如式(8)。
(8)
式中,yk表示对xk的传感器测量值;ak和ck表示非线性状态函数;wk、vk分别表示系统的过程噪声和测量噪声,其协方差为Qk、Rk。
文献[8]中证明,上述非线性离散系统与下列变比H∞问题有相同滤波解,如式(9)。
(9)
式中,Ak是ak的Taylor展开的一阶项,过程噪声和测量噪声的变比cw和cv,cv2=1-γ2δ12-γ2δ32,cw2=cv2;pk与qk为ak和ck在估计点xk/k处Taylor展开的一阶项与梯度之差,δ1与δ3则为高阶项的诱导范数的上界。
求解上式,我们在不忽略高次项的同时可以获得原非线性问题的扩展H∞滤波EHF的解,如式(10)
(10)

式(8)与(9)式的求解过程中,如果Taylor展开后忽略2阶以上的项,即可得到扩展Kalman滤波的解。H∞滤波实质上就是 Krein 空间中的Kalman滤波[9]。
2.2 基于 EHF 的步进电机观测器设计
考虑电机稳态即转速变化趋近于0的情况,步进电机的最简线性模型式(2)与转矩、速度方程可写作状态方程形式,如式(11)。
(11)

(12)
根据H∞滤波的形式,将式(11)叠加非线性的过程噪声项,组成非线性模型,再离散化、线性化,改写为离散递推公式形式,如式(13)。
(13)

Δ1是a(xk)的Taylor展开高阶项,其二阶即为k导数,计算导数平方和后得到二阶范数边界最小值,如式(14)。
(14)
wk作为过程噪声,不考虑系统产生的白噪声w1~w4,可根据表达式获得除白噪声外的过程噪声最小能量,如式(15)。
(15)
于是,按照式(9)的形式构造步进电机非线性模型的扩展H∞滤波状态观测器的递推解。其中关键参数变比cw、cv的最小值与参数γ的关系,如式(16)。
(16)
γ值的选取影响扩展H∞滤波的估计性能,γ越小,选取的噪声能量范围越小,抗干扰的鲁棒性越强;而γ越大,滤波精度会越高。γ趋近于无穷大时EHF退化为EKF[8]。
3 仿真结果分析
利用Simulink搭建HBM及其细分驱动系统的仿真模型,如图2所示。

图2 HBM驱动系统与观测器仿真
其中电机本体HBM Motor模块以磁网络模型构建,如图3所示。

图3 电机本体仿真模块
图3中的d/dtiA、d/dtiB、d/dtwe3个Fcn函数模块分别表示A相电压微分方程、B相电压微分方程与电速度微分方程,f(u)函数使用式(4)的电压方程与式(11)的转矩、转速方程。MOSFET Driver为功率放大电路仿真,Controller in DSC仿真了脉冲输入的细分算法和电流环闭环控制。EHF估计模块由式(10)设计,使用EKF与之对比。
电机模型的主要参数如下:极对数p=50,定子相电阻R=0.65 Ω,定子相电感(平均值)L0=6.4 mH(1 kHz 1Vrms),变化范围L2=1.0 mH,反电势系数ke=0.768 5,转动惯量J=900 g·cm2。细分驱动的PWM计算周期50 us,速度采样频率5 kHz。为兼顾运行速度,模型采用步长1 ms的ode23算法。
利用线性最简模型式(2)设计5 kHz计算频率的扩展H∞滤波EHF观测器与扩展Kalman滤波EKF观测器,观测对象为磁网络模型式(4),同步估算步进电机旋转时的动态转速,比较二者的估算精度与抗干扰鲁棒性。根据模型参数的计算,考虑电感参数不确定性的余量,设定扰动衰减因子、初始估计误差、过程噪声和测量噪声的协方差依次为:γ2=0.1,P0=diag[0.01 0.1 1 0.1],Q=diag[0.1 0.1 1 0.01],R=diag[0.2 0.2],cw、cv直接放入EHF估算器中根据γ计算。
仿真在0.4秒处增加6/s上升的外部负载,0.5 s恢复空载,1024细分驱动的仿真结果,如图4所示。
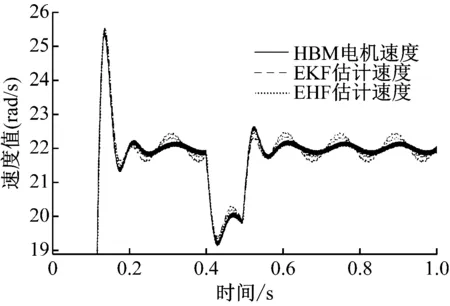
图4 EKF&EHF估算速度对比
比较仿真结果可以得出,EKF与EHF估算速度误差最大为 0.808 与 0.797 rad/s,二者的动态性能接近。收敛后稳态波动小,估算速度稳态时波动峰峰值为 0.808 rad/s 与 0.362 rad/s,EHF的稳态波动更小,稳态性能更好。在负载变化过程中,EHF跟随电机实际速度变化的能力也强于EKF。
然后,在1024细分下,测试了电感参数变化对EKF和EHF的估算性能变化,测试条件和结果,如表1所示。
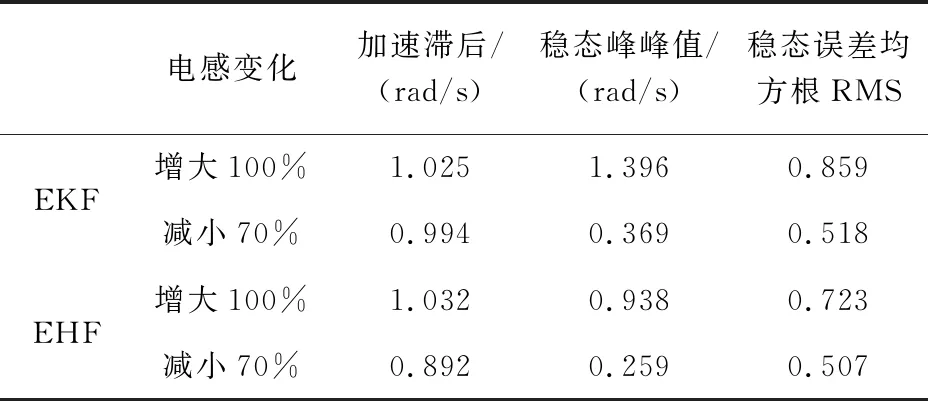
表1 EKF与EHF性能对比
仿真图像如图5、图6所示。

图5 L=200% EKF&EHF估算速度对比
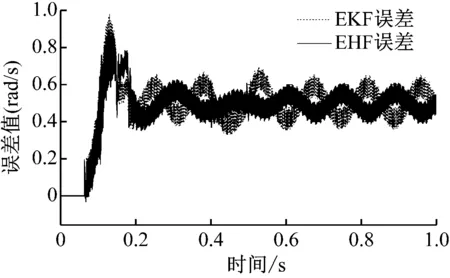
图6 L=30% EKF&EHF估算速度对比
由结果可知,EHF稳态性能明显优于EKF,抵抗电感变化的鲁棒性更强。而在电感减小时,EHF的动态性能也优于EKF。
4 总结
本文根据二相混合式步进电机的磁路特点,对步进电机系统的数学模型的非线性来源做了分析,再结合细分驱动模式,将模型非线性项化简为范围确定的参数不确定性与能量有界的过程噪声。针对模型噪声能量有界的特性,设计了扩展H∞滤波器作为步进电机系统的状态观测器,实现了对转子速度的估算。在对非线性的探讨方面考虑了如下两方面。
① 工程师根据过程噪声部分设计滤波器的参数,给出γ与cw、cv的计算关系。
② 根据电感L的不确定性,设计了电感增大和减小的仿真实验。
本文设计了两种滤波器估算非线性步进电机模型速度的对比仿真,仿真结果表明,相比扩展Kalman滤波,扩展H∞滤波器估算速度的精确性较高,而且其抵抗电感变化的鲁棒性更强。
