基于氧化石墨烯的QCM呼吸传感器及系统
2021-01-27何朝梁
何朝梁,金 浩,陶 翔,冯 斌
(浙江大学信息与电子工程学院,浙江杭州 310027)
0 引言
近年来,医疗领域中的传感器及系统研究受到了广泛的关注。在阻塞性睡眠呼吸暂停综合征(OSAS)等睡眠呼吸系统疾病的防治中,呼吸监测系统是非常必要的[1]。然而,现有的呼吸监测系统在实际使用中往往复杂且不便[2-5]。
我们曾提出了一种基于声表面波(SAW)器件的呼吸传感器,通过检测呼吸引起的温湿度变化来监测呼吸[2]。与其他呼吸传感方法如呼吸感应容积描记(RIP)技术[3]、阻抗图法[4]、心电信号估计法[5]相比,基于SAW器件的呼吸传感器更简单、方便、直观。然而,SAW传感器的工作频率很高(几百MHz),对检测电路的设计有很高的要求。此外,SAW传感器易受环境温度等干扰因素的影响。因此,基于SAW的呼吸监测系统很难投入实际应用。
石英晶体微天平(QCM)是一种基于体声波(BAW)的质量敏感型传感器。根据基本原理,QCM的谐振频率随晶体表面质量载荷的变化成线性变化[6],可以准确地检测到ng级的质量变化。QCM传感器可以通过检测呼吸引起的湿度变化来监测呼吸。并且,与SAW传感器相比,QCM传感器具有可靠性高、重复性好、结构简单、成本低等优点。
氧化石墨烯(GO)由于具有大表面体积比和高亲水性[7]的特点,是湿度检测的理想敏感材料[8],可以显著提高QCM湿度传感器的灵敏度。GO敏感膜修饰的QCM湿度传感器在重复性、稳定性、响应/恢复时间等方面优于其他QCM湿度传感器[9]。我们曾提出了一种用简单的滴涂法制备GO敏感膜的QCM湿度传感器。该传感器具有良好的灵敏度、重复性、响应和恢复速度,对湿度变化的响应时间和恢复时间分别约为20 s和3 s[9]。电子科技大学有团队提出了一种基于GO/PEI层状薄膜的QCM湿度传感器,采用喷雾工艺制备,响应时间和恢复时间分别减小到10 s和5 s左右[10]。此外,他们还提出了一种基于GO/ZnO层状薄膜的QCM湿度传感器,其响应时间和恢复时间分别小于9 s和5 s[11]。但是,这些QCM传感器的响应和恢复时间仍不能满足呼吸监测对响应/恢复速度的要求。因为呼吸监测要求响应恢复的总时间应小于3 s(成人正常呼吸速率为16~20次/min[12-13])。
为达到呼吸监测的响应/恢复速度要求,本文研究了GO敏感膜厚度对QCM湿度传感器响应和恢复时间的影响,同时选择合适的GO浓度值,以获得足够的频移,保持对湿度的高灵敏度。在此基础上,设计了一套完整的传感系统,可将QCM呼吸传感器应用于现实生活的人体呼吸监测中。
本文提出了一种基于QCM和GO敏感膜的呼吸传感器,在保证频移在可测量范围内的同时,对GO的厚度进行了优化,以满足呼吸监测的响应/恢复速度要求。并开发了一套完整的用于呼吸监测的传感系统,包括传感器、信号采集与处理电路和软件。
1 传感机理
用GO敏感膜修饰的QCM传感器可以用来测量湿度的变化。当湿度增加时,GO敏感膜会随即吸附更多的水分子,导致QCM表面质量增加。当湿度降低时,GO敏感膜吸附的水分子会脱离,导致QCM表面质量降低。而QCM是一种质量敏感型传感器,质量变化会导致其谐振频率改变,其质量敏感公式为[6]:
(1)
式中:Δf为频率偏移量,Hz;f为石英晶体的谐振频率,Hz;Δm为质量偏移量,g;K为频率常数,Hz·m;ρQ为石英晶体的密度,g/m3;S为晶体表面电极的面积,m2。对于某一确定的QCM传感器,K、ρQ、f、S都为确定值,因此Δf与Δm为线性关系。
人的呼吸会导致上嘴唇和鼻子之间的空气湿度周期性变化。在呼吸监测时,将GO敏感膜修饰的QCM传感器置于鼻子与上唇之间。当人呼气时,呼出空气的湿度高于环境湿度,使得QCM表面的GO敏感膜吸附水分子,QCM表面质量增加,谐振频率降低。当人吸气时,湿度恢复到环境湿度,GO敏感膜中的水分子脱附,QCM表面质量降低,谐振频率回升到原值。所以,我们可以通过测量QCM传感器的谐振频率变化来实时监测呼吸。
2 传感器及系统设计
2.1 传感系统概述
传感系统的系统框图如图1所示,系统由三部分组成:传感器、硬件电路和软件。传感器负责感知所在位置的湿度变化。硬件电路负责QCM振荡信号产生、信号处理、信号频率测量以及数据发送等功能。软件通过接收频率数据实时监测呼吸情况,记录每次呼吸的发生时间和强度等呼吸特征。
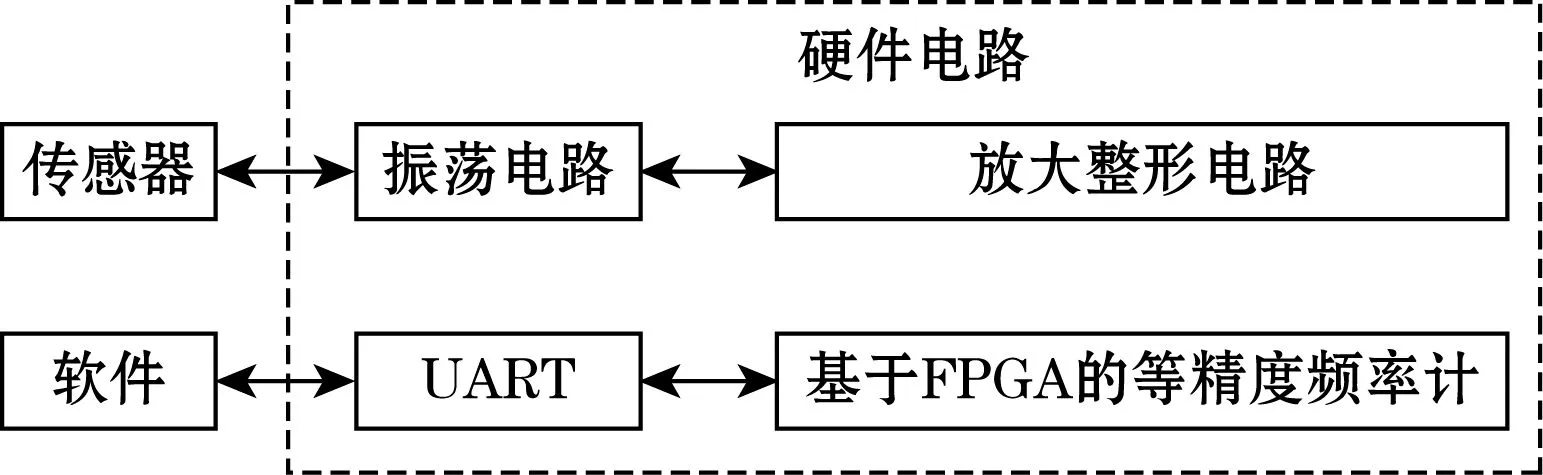
图1 系统框图
硬件电路主要分为3个模块:振荡电路、放大整形电路和基于FPGA的等精度频率计[14]。振荡电路是以QCM传感器为石英晶体振荡器的晶体振荡电路。QCM传感器与振荡电路模块之间可以通过长度为0~1.5 m的信号线连接,一起组成一个晶振电路。放大整形电路将振荡电路产生的信号放大并整形成方波。其中,放大电路采用共发射极三极管放大电路结构,使用反相器74LS04实现方波整形。基于FPGA的等精度频率计负责测量放大整形电路输出的方波信号频率,并通过UART将频率数据发送到软件。软件接收频率数据,并通过分析频率变化识别每一次呼吸的发生,在呼吸发生时记录发生时间、频移量等相关信息。
2.2 传感器制备
QCM传感器采用GO作为敏感膜。图2(a)和图2(b)分别是GO敏感膜修饰的QCM传感器的截面示意图和实物照片。QCM由2个金电极和AT切向石英晶体组成,直径为13.97 mm,谐振频率为6 MHz。AT切向石英晶体具有接近零的温度系数,有利于抵抗环境干扰。为保证良好的湿敏特性,选择浓度为2 mg/mL的GO分散液。
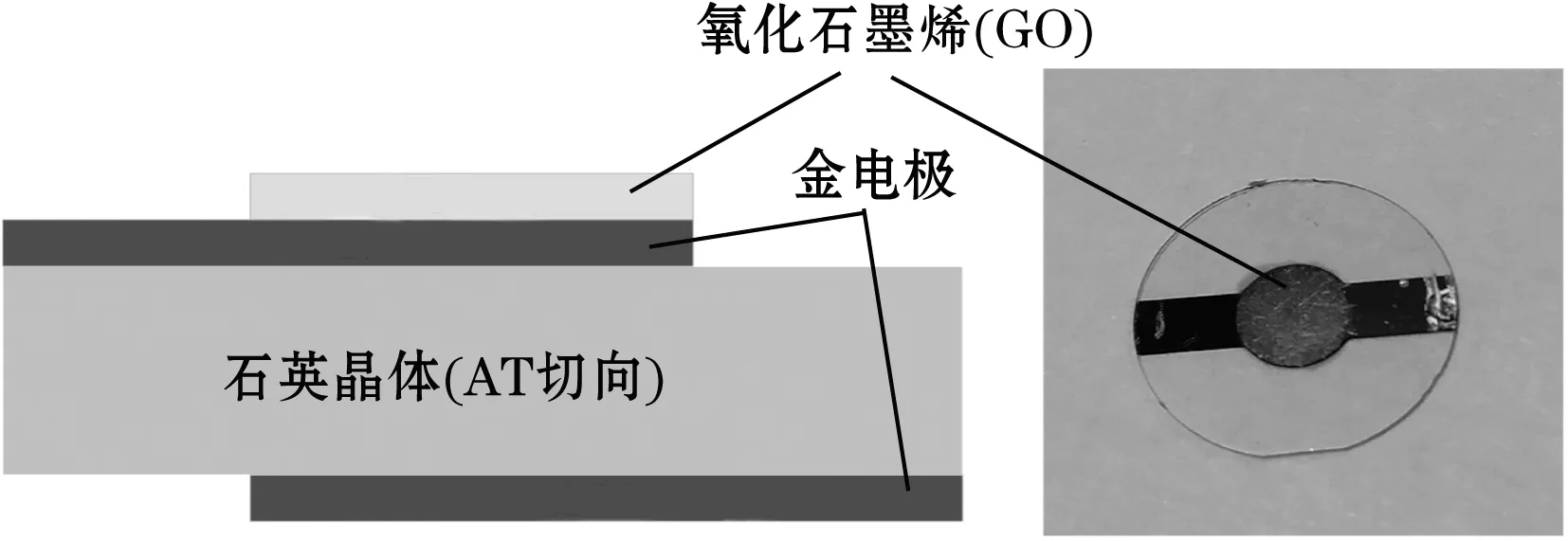
(a)横截面示意图 (b)实物图图2 QCM传感器
制备GO敏感膜修饰的QCM传感器的过程如下:首先,用丙酮、乙醇和去离子水依次超声波清洗QCM 5 min。之后,用氮气吹干QCM,并在60 ℃下烘烤10 min。同时用超声波振荡GO分散液(2 mg/mL),以确保溶液的均匀性。然后,用微量进样器将一定量的GO分散液滴到QCM金电极中心,并通过旋涂使溶液均匀地分布在QCM金电极上。结束旋涂后,取下QCM并在室温下放置直到干燥。如此就得到了带有GO敏感膜的QCM湿度传感器。
可以通过控制GO分散液用量、旋涂的转速、旋转时间对GO敏感膜厚度进行控制。实际制备了4种不同厚度的GO敏感膜,分别约为300,400,500,600 nm,制备条件如表1所示。
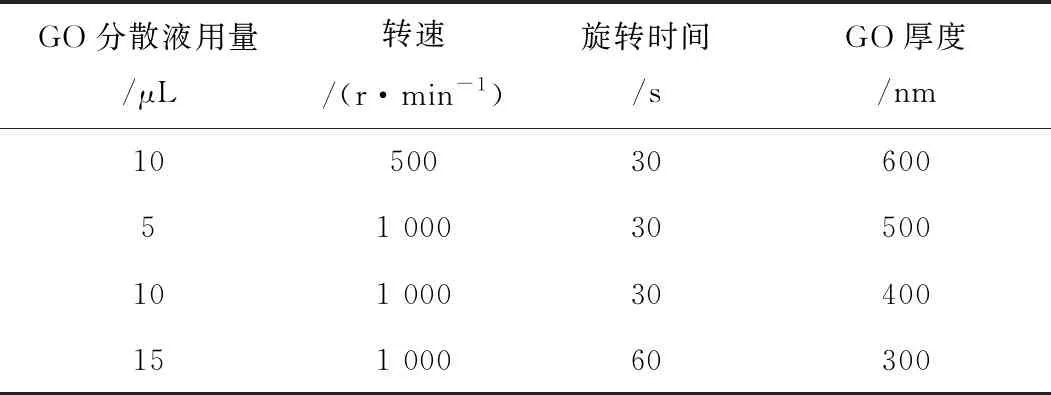
表1 制备条件与GO厚度
3 测试结果及分析
3.1 响应和恢复速度
由于氧化石墨烯(GO)表面体积比大,亲水性强,GO敏感膜修饰的QCM湿度传感器灵敏度很高,明显优于其他湿度传感器[9],传感器的灵敏度要求很容易满足。
成年人每分钟呼吸约16~20次,对应的呼吸周期约为3~4 s[13]。在呼吸监测过程中,传感器对湿度变化的响应恢复总时间应短于呼吸周期。然而,在以往的研究中[9-11,15],带有GO敏感膜的QCM湿度传感器对湿度变化的响应和恢复时间并不能满足呼吸监测的要求。
当响应和恢复速度都慢于呼吸引起的湿度变化时,湿度传感器无法用于呼吸监测。如果响应速度快于湿度增加,但恢复速度慢于湿度减小,则传感器将无法恢复到初始频率,基准谐振频率将随时间逐渐下移[2],直到脱离晶振电路的频率工作范围。这种情况不但会给系统自动识别呼吸造成麻烦,还导致系统无法长时间监测呼吸。
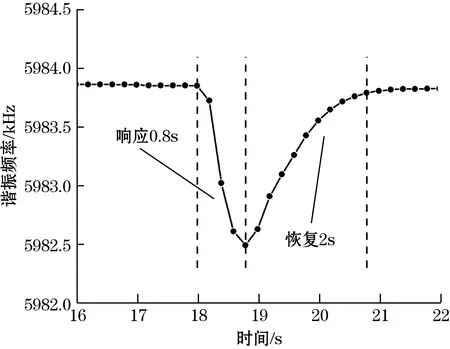
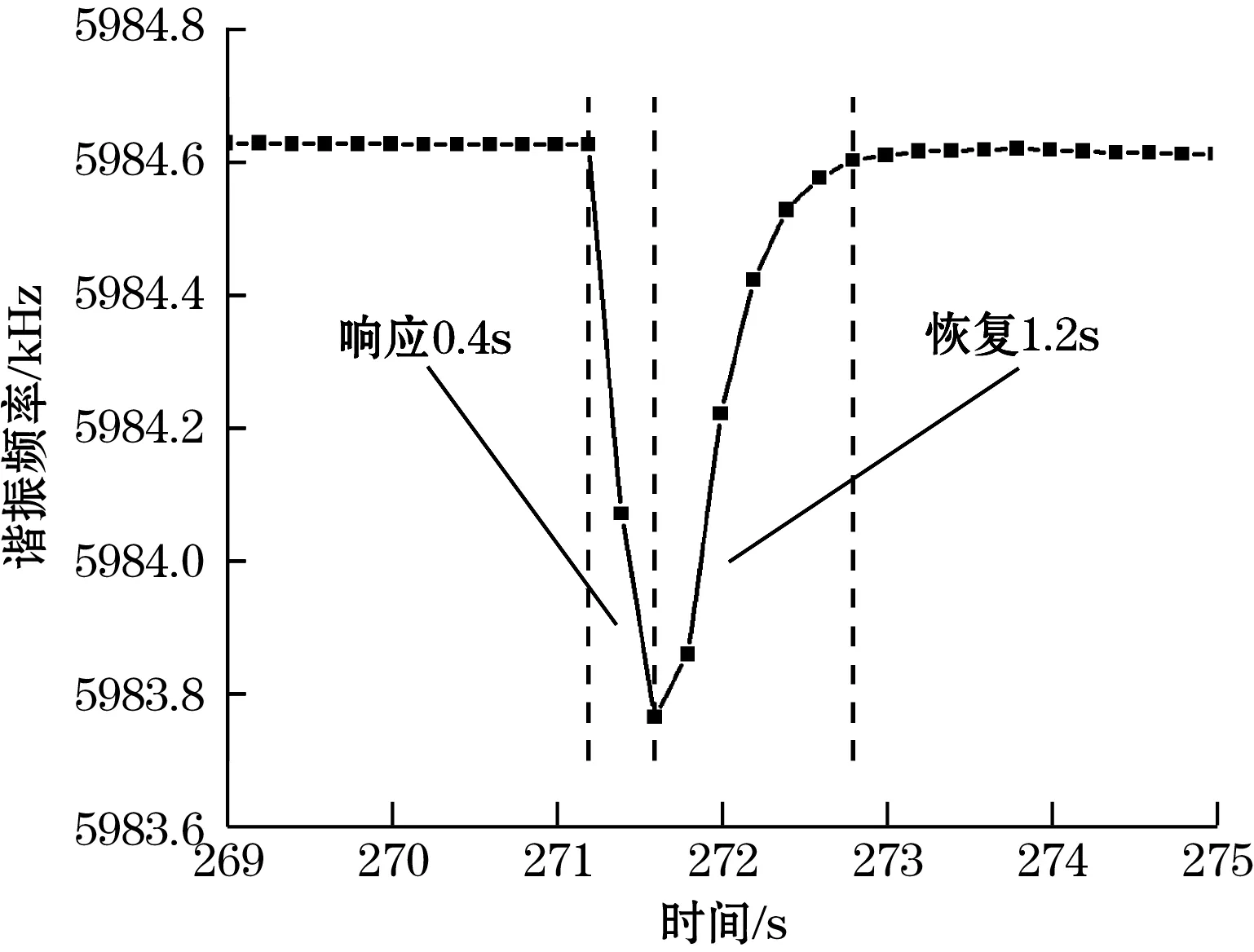
图3显示了一次呼吸对应的基于GO敏感膜的QCM湿度传感器的谐振频率偏移。如图3(a)所示,GO敏感膜厚度约为600 nm的传感器的响应时间约为0.8 s,恢复时间约为6 s,总时间长于呼吸周期,且恢复时间过长,使得传感器无法满足连续呼吸监测的要求。

(a)GO敏感膜厚度约为600 nm

(b)GO敏感膜厚度约为500 nm
(c)GO敏感膜厚度约为400 nm
(d)GO敏感膜厚度约为300 nm图3 一次呼吸导致的QCM传感器的频率偏移
通过减小GO敏感膜的厚度,可以缩短水分子离开GO敏感膜的时间,从而缩短传感器的恢复时间。所以,我们采用旋涂法在QCM表面制备了厚度较小的GO敏感薄膜。与其他制备方法如滴涂法[9]、喷涂法[10-11]、逐层自重组技术[16]相比,旋涂法可以更简单有效地控制制备的GO敏感膜厚度。
经过改进,我们得到了一组GO敏感膜厚度更小的QCM传感器。这些传感器的响应和恢复时间如图3(b)~(d)所示。在图4中,我们比较了4种不同GO厚度下传感器的频移、响应时间、恢复时间和总时间。结果表明,随着GO厚度的减小,响应时间基本保持不变,一直小于1 s,而恢复时间明显缩短。在GO厚度约为300 nm时,传感器的响应时间和恢复时间分别约为0.4 s和1.2 s,满足连续呼吸监测(总时间小于3 s)的要求。GO敏感膜为300 nm时,呼吸导致的频移一般在1 kHz左右,最小则为200 Hz。设计的系统的频率测量精度为1 Hz,但分辨呼吸导致的频移需要考虑环境干扰的影响,所以传感器对呼吸的灵敏度必须明显大于干扰。考虑到环境干扰带来的最大频移不超过50 Hz,使用GO敏感膜为300 nm的 QCM传感器可以明确区分呼吸与环境干扰导致的频移。因此,选择300 nm作为QCM表面GO敏感膜的最佳厚度。
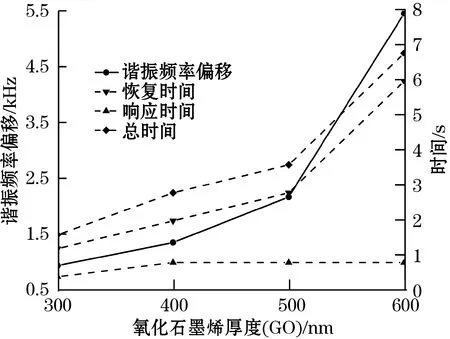
图4 GO敏感膜厚度不同时传感器频移、响应时间、恢复时间、总时间的比较
3.2 呼吸对谐振频率的影响
图5显示了正常连续呼吸时系统测量的QCM传感器(GO敏感膜约为300 nm)的谐振频率偏移。传感器位于鼻子和上唇之间。当人呼出空气时,谐振频率迅速下降,说明GO敏感膜随湿度的增加快速吸附水分子。当人呼气结束开始吸气时,QCM周围的湿度恢复到与环境湿度相同的程度,GO敏感膜吸附的水分子迅速脱离,谐振频率恢复到原频率。

图5 正常连续呼吸对应的QCM传感器(GO敏感膜约为300 nm)的谐振频率变化
当QCM的位置固定时,呼吸强度直接与谐振频率的下降量相关。由于呼吸强度的不均匀,每一次呼吸所引起的频移是不同的,而且变化很大。如果有意控制呼吸强度,则谐振频率的下降量在200~4 600 Hz范围内。如果是正常呼吸,谐振频率的下降范围为400~1 700 Hz,如图5所示。因此,通过比较频移可以确定同一场景下的不同呼吸的强弱。
如图3(d)所示,QCM传感器(GO敏感膜约为300 nm)一个频率变化周期的总时间约为1.6 s,明显短于呼吸周期,满足连续呼吸监测的要求。如图5所示,51 s内一共发生呼吸了23次,相应呼吸频率约为27 次/min,高于正常成人的呼吸频率。因此,该传感器能够满足正常成人连续呼吸监测的要求。
3.3 呼吸识别
系统在获得传感器的谐振频率数据后,会根据频率变化自动识别是否发生呼吸,并在记录相应的呼吸时间和强度(频率下降量)的基础上推断出被监测者的呼吸特征。考虑到可能的环境干扰和不同应用环境的差异,我们通过检测频率响应和恢复过程来确定是否发生呼吸。频率响应就是呼气引起的频率降低,它需要满足约束条件1。频率恢复就是吸气引起的频率上升,它需要满足约束条件2。
约束条件1:
fA-fB>Y1& 0<(tA-tB) 约束条件2: fC-fB>Y2& 0<(tC-tB) 式中:fA、fB、fC分别为QCM传感器在tA、tB、tC时刻的谐振频率;X1、X2、Y1、Y2为呼吸识别参数,根据呼吸与频移的对应关系确定,受QCM传感器灵敏度和放置位置的影响。 只有当约束条件1被满足且约束条件2在随后规定时间内同样被满足时,才认为发生了一次呼吸。也就是说,只有满足Y1和X1要求的快速频率下降,才被认为是呼气引起的频率下降。只有当软件发现呼气引起的频率快速下降时,才认为随后规定时间内符合Y2和X2要求的频率快速上升是吸气引起的。此时系统才认为被监测者进行了一次呼吸。 X1、X2、Y1、Y2作为呼吸识别参数,与传感器器件本身密切相关。对于我们制备的QCM呼吸传感器(GO敏感膜约为300 nm)而言,当X1=2 s、X2=3 s、Y1=200 Hz、Y2=200 Hz时,传感系统可以无遗漏的识别每一次呼吸。 此外,系统在每次呼吸检测后会搜索相应的呼吸频率变化阶段,得到最低和最高频率,相减得到代表呼吸强度的呼吸频率下降量。 软件算法如下: 步骤1:等待满足约束条件1的频率降低(对应呼气)。当出现满足约束条件1的频率下降时,转到步骤2;否则,留在步骤1; 步骤2:等待满足约束条件2的频率上升(对应吸气)。如果在规定时间内检测到满足约束条件2的频率上升,则认为发生一次呼吸并进入步骤3;否则,认为受到了环境干扰并返回步骤1重新开始; 步骤3:检查这次呼吸对应时间段的呼吸频率数据,确定频率最低点、频率最高点,计算得到该次呼吸对应的呼吸频率下降量,并记录呼吸发生的时间,然后回到步骤1。 由于系统通过频率的下降沿和上升沿来检测呼吸,因此QCM传感器的谐振频率并不是必须在一次呼吸结束后恢复到初始值。系统允许传感器在频率恢复到初始值前对下一次呼吸作出响应,只要之后在呼吸间隙频率能恢复初始值即可。这增加了系统可以测量的呼吸频率上限。 综上所述,本文提出了一种具有最佳GO敏感膜的QCM呼吸传感器和一套完整的呼吸监测系统,通过检测呼吸过程中的湿度变化来实时监测人的呼吸特征。通过对GO膜厚度的优化,使传感器的响应时间和恢复时间分别缩短到0.4 s和1.2 s,满足了连续呼吸监测对响应/恢复速度的要求。研制的传感系统可测量的呼吸频率大于27次/min,可作为正常成人的呼吸监测系统。该系统结构简单,用户友好,成本低廉。在未来,呼吸监测系统的电路可以小型化,可以集成蓝牙用于无线数据传输,可以使用机器学习算法识别呼吸模式,有望作为可穿戴的、家用的医疗保健应用。4 结束语
