基于非合作室内环境的超宽带无中心组网定位
2021-01-26王卿蔚保国
王卿 蔚保国
摘 要:为提高非合作室内环境下超宽带组网定位能力,采用无中心定位算法理论对超宽带测距输出距离信息进行解算分析,得到相对定位结果,并将定位结果与光电标定系统结果进行实测对比,对精度进行评估。结果表明,相比传统超宽带定位模式,利用超宽带测距和无中心定位算法相结合的形式,能够实现无中心定位以及各节点之间的相对位置解算,最终确定各节点之间的相对位置。超宽带测距和无中心定位算法相结合,在相对定位方面具有良好的稳定性和精确度,可以广泛应用于室内室外多种场景。
关键词:通信网络技术;室内定位;超宽带;MDS算法;无中心
中圖分类号:TN06 文献标识码:A
文章编号:1008-1542(2021)01-0008-07
随着定位技术在人们生活中的应用越来越广泛,人们对于定位技术的精确度以及定位系统对环境适应能力方面的要求也越来越高。各模块通过协同组网执行任务,需要包括移动组网、精确定位在内的传统定位技术提供定位支持,从而获得相对距离信息[1]。不仅个体之间需要实现相对定位,集群也需要在有定位信息作为输入条件下进行集群导航任务决策与规划。但非合作室内环境下,由于没有先验知识对室内环境进行了解认知,因而无法对定位模型进行构建。充分考虑非合作室内环境下定位精度不高、通信链路受阻等因素影响,如何进行相对定位成为当前无线定位技术研究的热点之一[2-3]。
室内环境下由于多径环境的影响,信号载波在室内的多径传输效应造成首径信号的识别、提取困难。然而超宽带(ultra wideband, UWB)脉冲信号基于多径分辨能力强、穿透能力强、定位精确、隐蔽性好、抗干扰能力强等优点,适宜在室内定位中使用[4]。基于以上特性,近年来人们在定位系统设计、定位算法实现、误差抑制等方面进行了大量研究,超宽带室内定位在智能家居、智能仓储、智慧工厂等领域得到了广泛应用[5-8]。
传统超宽带定位模式采用多基站对标签进行定位的方式,定位系统存在中心节点,定位精度为20 cm左右,一旦中心节点设备损毁或断电,整个定位系统就会面临瘫痪。同时,非合作动态环境下由于缺失锚点信息,无法利用环境中已知锚点信息进行定位。本文采用无中心定位模式,系统定位不依赖于中心节点,也无需布置锚点,在已有超宽带测距的基础上采用多维标度法(multidimensional scaling, MDS)解算相对定位结果,可对系统中的多个节点进行定位,构建灵活机动的无中心自组网定位系统,系统稳定性和适用性更优于传统定位模式。
1 定位算法模型
1.1 无中心定位算法理论
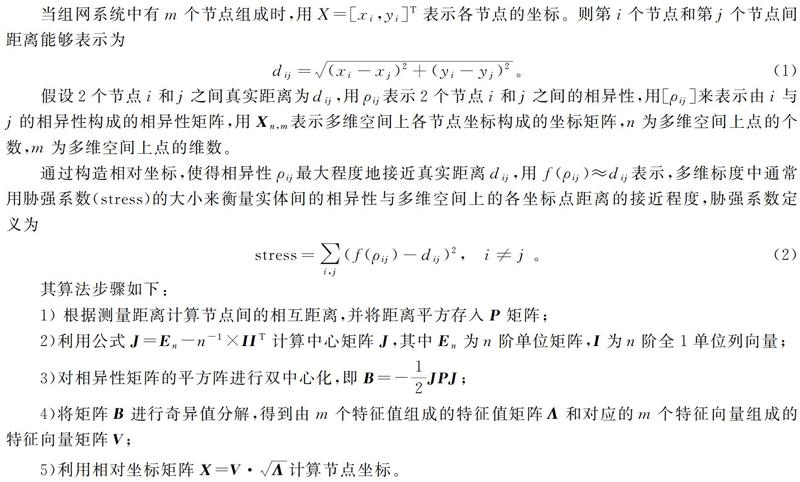
当多维空间中存在多个节点时,可以利用多维空间中获得的节点间的距离信息,把空间中物体的相似性转换为空间坐标,构造真实距离矩阵中的元素,然后中心化,求特征值、特征向量,进而得到相对坐标,计算节点在低维度空间中的位置,降低原始数据的复杂度[9-16]。
其算法步骤如下:
1) 根据测量距离计算节点间的相互距离,并将距离平方存入[WTHX]P矩阵;
1.2 测距算法原理与误差分析
现阶段常用的相对距离测量方式大致有4种,包括根据信号到达的时间计算、根据信号到达的强度计算、根据信号到达的角度计算和根据信号到达的时间差计算[17]。其中,针对TDOA方案进行设计时只需要移动标签发送广播信号,区域内的基站收到该信号,通过接收时间进行计算,各距离差求得距离值。相较于TOA方案需要标签和某一基站一对一通信结束后才能与下一个基站进行通信的方式[18-19],TDOA方案可以有更大的系统节点容量和拓展性。但由于测距是以厘米级精度为目标,而UWB电磁波信号在空气中传播速度接近3×108 m/s,因此TDOA方案要求区域内基站时间高度同步,这对硬件系统提出了更高要求,从而极大地增加了成本[20]。
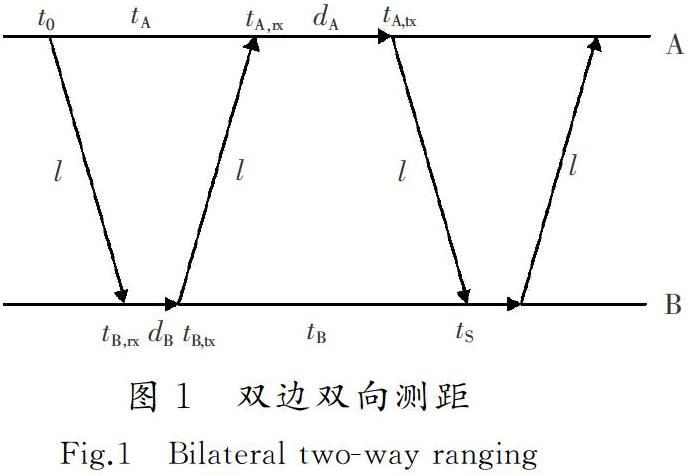
因此,本文将采用TOA测距方案,该方案仅需要在测距过程中记录信号到达各节点的时间戳,然后根据时间戳差计算信号传输时间TOF。但因为受到电磁波传播速度影响,通过直接计算TOF的方式会导致测距误差较大。本方案采用双边双向测距算法,该算法与单边单向测距相比减少了晶振时钟带来的误差,图1为双边双向测距算法实现过程。
双边双向测距步骤如下:
步骤1:某一节点A根据搜寻阶段所获得的节点信息表,向其他节点发送具有时间戳的脉冲序列,并记录此时间戳,打开接收。
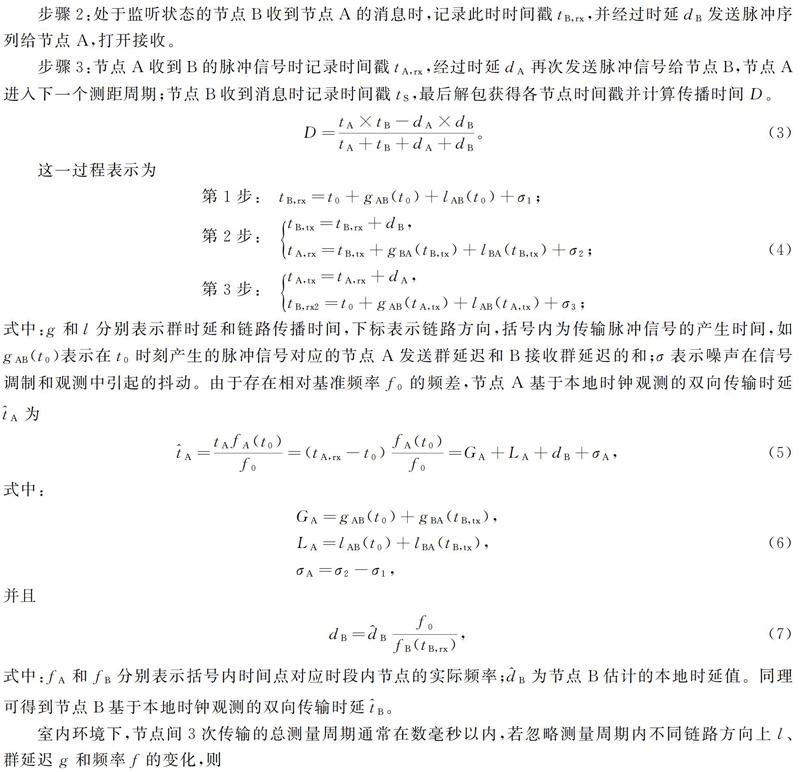
步骤2:处于监听状态的节点B收到节点A的消息时,记录此时时间戳tB,rx,并经过时延dB发送脉冲序列给节点A,打开接收。
步骤3:节点A收到B的脉冲信号时记录时间戳tA,rx,经过时延dA再次发送脉冲信号给节点B,节点A进入下一个测距周期;节点B收到消息时记录时间戳tS,最后解包获得各节点时间戳并计算传播时间D。
经计算可知,测距误差与时钟的性能有关,当频偏为10-4 s-1时,误差为3 mm,该方法可以有效降低测距误差,故可在多节点组网测距系统中使用,同时为MDS定位解算提供较为精准的测距输入信息,减小由于测距准确性不足带来的误差。
2 实验测量仿真及结果分析
为实现室内条件下无中心定位能力,在仿真分析的基础上,利用商用UWB器件构建原理样机,支持UWB测距和板载MDS计算能力,并在室内环境构建动态测试场景,利用已知测绘点位对UWB模块无中心定位精度性能进行了验证评估,见表1。
2.1 测距结果及分析
在直线距离为10 m的测试范围内,每隔1 m标记1个测试点,在每个测试点上分别采集20组数据,统计并对数据特征进行分析,实验结果见图2。
根据测量结果统计数据可知,实际测量值的测量误差近似服从均值为0.051 m、标准差为0.022 m的正态分布。根据sigma原则,数值分布在(μ-σ,μ+σ)中的概率为0.652 6,即在68.27%概率下设备精度为0.022 m;经过测量计算可知,测距结果偏差较小,可以用作定位原始输入数据。
利用以上结果进行仿真,结果见图3。通过仿真可得:利用MDS算法对系统间各个测距值进行处理计算,输出定位结果,最大定位偏差为3 cm,可满足绝大多数室内定位的需求。
2.2 平台搭建及实测结果
测试模块工作原理如下:测距模块把时间戳信息发送给核心板,核心板处理解算测距结果并通过通信模块把本地测距结果发送给其他模块,同时核心板负责接收通信下传的无线数据测距结果,如此各模块均可收到各个模块之间的测距信息。通过MDS算法构造矩阵解算各点之间的相对距离,得到定位结果。最后通过串口把核心板处理得到的定位信息发送给PC端。
测试环境如图4所示,测试场地长×宽为15 m×15 m,4个模块选择不同的架设高度进行布置,各节点以10 Hz的数据刷新速率将定位数据输出并记录,按照此方式测量了节点在室内情形下的定位情况。
图5 a)为无中心定位4点相对位置情况,图5 b)为具体某一点定位结果。经过多次测量发现,实际位置测量值以光电标定点为中心进行波动。通过图6可知,基于MDS算法无中心定位稳定性能良好,能很好地反映节点运动的真实轨迹。实验结果表明,基于MDS的无中心定位算法在动态条件下的定位精度及工作稳定性都符合绝大部分室内定位使用条件,实现了无中心组网系统在无外源信息情况下相对定位。
3 结 语
MDS算法与超宽带测距相结合的系统具备无中心定位能力,最终确定的各节点之间的相对位置可满足室内定位方面的应用要求。相较于传统UWB定位模式,其具有如下优点。
1) 可以满足无中心定位的需求。传统UWB定位模式仅可针对标签进行定位,无法获取系统中各节点间的相对位置。该系统采用分布式测距模式与MDS定位算法相结合的形式,系统稳定性优于传统超宽带定位,且系统易于集成,在低成本平台上即可具备无中心定位能力。
2) 定位精度达到厘米级。相比传统定位模式,该系统将测距结果作为MDS输入变量,解算后定位精度可达厘米级,有效提升了定位精度,增强了系统的实用性。
3) 该系统在节点容量较少的情况下能够维持很好的稳定度及可用性,但是当节点容量增多,在动态环境下进行定位时,由于受到设备接收时延累积影响,会出现系统实时定位精度下降的问题。未来将在提高系统容量以及增强时效性方面继续开展研究。
参考文献/References:
[1] POULOSE A, EYOBU O S, KIM M, et al. Localization error analysis of indoor positioning system based on UWB measurements[C]//2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN). [S.l.]:IEEE, 2019: 84-88.
[2] SAKPERE W, ADEYEYE-OSHIN M, MLITWA N B W. A state-of-the-art survey of indoor positioning and navigation systems and technologies[J]. South African Computer Journal, 2017, 29(3): 145-197.
[3] RUIZ A R J, GRANJA F S. Comparing Ubisense, Bespoon, and Decawave UWB location systems: Indoor performance analysis[J]. IEEE Transactions on Instrumentation and Measurement, 2017, 66(8): 2106-2117.
[4] LIU Q, QIU J, CHEN Y. Research and development of indoor positioning [J]. China Communications, 2016, 13(2): 67-79.
[5] 张强. 室内环境下基于UWB技术的定位研究与系统实现[D].哈尔滨:哈尔滨工业大学,2015.
ZHANG Qiang. Research and Implementation of Indoor Localization Systems Using UWB Signals[D].Harbin: Harbin Institute of Technology, 2015.
[6] 葛丽丽. 基于UWB的高精度室内定位及时钟同步算法的研究[D]. 北京:北京邮电大学,2019.
GE Lili. Research on High Precision Indoor Location and Clock Synchronization Algorithms based on UWB [D]. Beijing: Beijing Univer-sity of Posts and Telecommunications, 2019.
[7] 蒙靜. 基于IR-UWB无线室内定位的机理研究[D].哈尔滨:哈尔滨工业大学,2010.
MENG Jing. Research on IR-UWB Propagation Mechanism for Wireless Indoor Position System[D]. Harbin: Harbin Institute of Technology, 2010.
[8] 顾灵茹. 基于UWB/INS的室内定位技术研究[D].成都:电子科技大学,2020.
GU Lingru. Research on Indoor Positioning Technology Based UWB/INS[D]. Chengdu: University of Electronic Science and Technology of China, 2020.
[9] TANG X Y,WANG Z,HE Q W,et al.Latent feature extraction for process data via multidimensional scaling[J].Psychometrika,2020,85(2):378-397.
[10] WU Changhua, SHENG Weihua, ZHANG Ying. Mobile sensor self localization based on multi-dimensional scaling[C]//Proceeding of ICRA. Roma:[s.n.], 2007:4038-4043.
[11]王林,王晓鹏.改进的无线传感器网络中多维定标定位算法[J].计算机工程与应用,2011,47(27):115-118.
WANG Lin, WANG Xiaopeng. Advanced MDS-MAP algorithm for wireless sensor networks[J]. Computer Engineering and Applications, 2011, 47(27):115-118.
[12]胡良梁. 基于多维标尺的无线传感器网络定位算法研究[D].重庆:重庆理工大学,2013.
HU Liangliang. Research on MDS-based Localization Algorithm of Wireless Sensor Network[D]. Chongqing: Chongqing University of Technology, 2013.
[13]马怡安. 无线传感网络中基于多维尺度分析技术的定位算法研究[D]. 上海:上海交通大学, 2012.
MA Yian. Research on Localization Algorithms in Wireless Sensor Network Based on Multidimensional Scalin
g[D].Shanghai: Shanghai Jiao Tong University,2012.
[14]李响.一种基于多维标度的无线传感器定位算法研究[D].长春:吉林大学,2015.
LI Xiang. Research on A Localization Algorithm in WSN Based on MDS[D].Changchun: Jilin University,2015.
[15]李海峰.融合质心算法的快速改进型MDS-MAP算法[J].計算机工程,2015,41(5):102-105.
LI Haifeng.Fast improved MDS-MAP algorithm fused with centroid algorithm[J].Computer Engineering,2015,41(5):102-105.
[16]SHANG Yi, RUML W. Improved MDS-based localization[C]//Proceeding of IEEE INFOCOM. Hong Kong: [s.n.],2004: 2640-2651.
[17]董家志. 基于UWB的室内定位与跟踪算法研究[D].成都:电子科技大学,2015.
DONG Jiazhi. Research of the Positioning for Indoor Positioning and Tracking Based on UWB[D]. Chengdu: University of Electronic Science and Technology of China, 2015.
[18]WANG F Q,ZHANG X F.Joint estimation of TOA and DOA in IR-UWB system using sparse representation framework[J].ETRI Journal,2014,36(3):460-468.
[19]王方秋,张小飞,汪飞.IR-UWB系统中基于root-MUSIC算法的TOA和DOA联合估计[J].通信学报,2014,35(2):137-145.
WANG Fangqiu,ZHANG Xiaofei,WANG Fei.Root-MUSIC-based joint TOA and DOA estimation in IR-UWB[J].Journal on Communications,2014,35(2):137-145.
[20]陈小斯,沈重,周群,等.基于TDOA算法的差分UWB室内定位系统研究[J].现代电子技术,2018,41(6):45-49.
CHEN Xiaosi,SHEN Chong,ZHOU Qun,et al.Research on differential UWB indoor positioning system based on TDOA algorithm[J].Modern Electronics Technique,2018,41(6):45-49.