改进凸包的贝叶斯模型显著性检测算法
2021-01-26李春华秦云凡刘玉坤
李春华 秦云凡 刘玉坤

摘 要:针对传统贝叶斯模型算法对图像显著区域检测精度需要进一步提高的问题,提出一种改进凸包的贝叶斯模型显著性检测算法。首先,利用流行排序算法对图像进行前景提取,提取的前景区域作为贝叶斯模型的先验概率;其次,利用颜色增强的Harris角点检测算法检测图像在RGB,HSV,CIELab 3个颜色空间中的特征点,分别构造RGB,HSV,CIELab空间的凸包,求取3个颜色空间下的凸包的交集;再次,通过贝叶斯模型根据先验概率、凸包与颜色直方图结合得到的观测似然概率计算获得显著性区域图;最后,将新算法在两大公开数据集MSRA和ECSSD中进行测试。结果表明,新算法能够有效抑制背景噪声,完整检出显著区域,F-measure值在MSRA和ECSSD数据库中的测试结果分别为0.87和0.71,准确率-召回率曲线在复杂图像数据库高于传统经典算法。新算法改进了传统经典算法的检测效果,进一步提高了显著图检测的准确性。
关键词:图像处理;显著性检测;凸包;超像素;流行排序;贝叶斯模型
中图分类号:TN958.98 文献标识码:A
文章编号:1008-1542(2021)01-0030-08
现代生活中各种智能设备不断涌现,由此产生了大量图像,从中自动提取关键信息的需求日益显著。显著性检测技术可以将图像中显著区域从复杂场景中分离出来,有利于提高后继图像信息的处理速度。图像显著性检测算法通常可以分为自顶向下模型和自底向上模型两类。自顶向下的模型[1-3]是一种需要借助具体的先验知识进行检测的模型,使用预先人工标记的真值图,通过学习训练等方式检测图像中的显著目标。这种方法运行时间长、通用性差。自底向上的模型[4-5]是一种由底层数据驱动的模型,通过全局对比以及局部对比底层特征来检测显著区域,处理速度较快。目前显著性检测算法多采用自底向上模型。ITTI等[6]最先提出自底向上的模型框架,它融合多尺度的强度、颜色和方向信息进行显著性检测。ACHANTA等[7]通过计算每个像素的颜色与所有像素颜色的平均值之间的色差来获得显著性图,该方法适用于背景简单的图像。传统算法大多从像素或区域之间的对比度入手计算显著性,能够检测到图像中的高频信息,但是图像显著性区域显示不均匀。为解决这些问题,基于图像先验信息的显著性检测模型不断出现,例如贝叶斯先验模型[8]、前景先验模型[9]、中心先验模型[10]、背景先验模型[11]等。
基于贝叶斯模型的图像检测算法最早由RAHTU等[12]提出,在貝叶斯模型基础上,利用滑动窗口将图像分为显著区域和边界区域,根据显著区域和边界区域的颜色信息差异计算显著值。这种方法不仅计算复杂性高,而且只能获取到显著目标的位置,不能检测到显著目标的轮廓。随后XIE等[13]提出基于凸包的贝叶斯显著性检测模型,首先利用颜色增强角点算法获取的特征点构造凸包,再对图像聚类计算,得到贝叶斯模型中的先验概率。这种方法在很多数据集的检测实验中取得了较好效果,但是在对图像聚类过程中,由于区域被分配了相同的权重,聚类结果中含有的背景噪声导致结果不准确。2013年,XIE等[14]再次提出在贝叶斯模型的基础上利用图像的中低层信息进行显著性检测,计算先验概率时采取拉普拉斯算子进行聚类,提高了检测性能,但是凸包内的背景噪声仍然存在。近年来,深度学习被应用于显著性检测算法,例如文献[15]利用卷积神经网络进行初步显著图的计算,再结合图像的多种特征信息进行全局和局部的对比度计算获得显著图。基于深度学习的方法虽然能取得较好的检测效果,但需要经过大量的训练过程,过程繁琐,运行速度慢。
针对以上问题,本文提出了一种基于改进凸包的贝叶斯模型的图像显著性检测算法,使用贝叶斯模型计算显著性图。贝叶斯模型中的先验概率通过提取前景区域算法获得,观测似然概率借助凸包和颜色直方图得到。前景区域在超像素分割的基础上利用流行排序算法确定,凸包为RGB,CIELab,HSV 3种颜色空间下分别构建的凸包交集。采用本文算法在公开数据集MSRA和ECSSD数据库中进行了实验测试。
1 算法描述
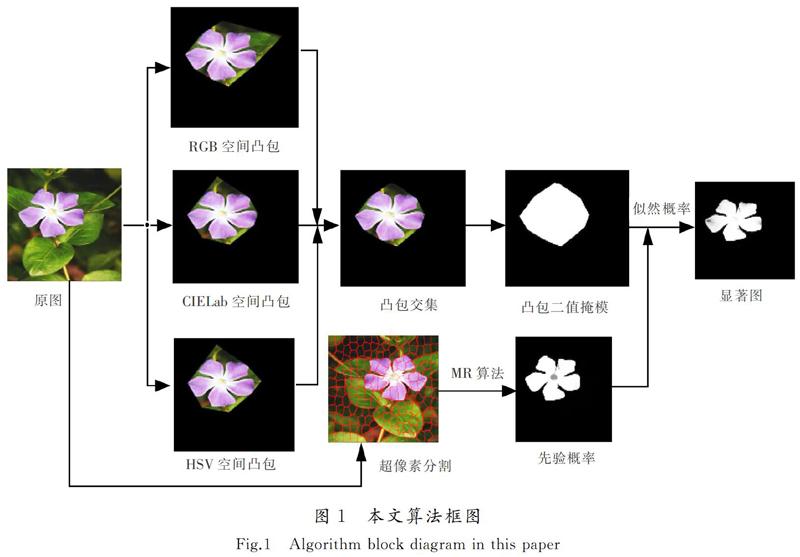
算法的实现过程是,首先在超像素分割的基础上利用流行排序算法初步获取前景区域,将其作为贝叶斯模型的先验概率。传统贝叶斯模型算法在单颜色空间下利用角点检测算子检测出兴趣点进行凸包构建,背景噪声也被包含进凸包内。为减小凸包内的背景噪声,本文算法在RGB,CIELab,HSV 3种颜色空间下分别检测特征点、分别计算凸包,取凸包的交集作为合理凸包,再与颜色直方图结合计算观测似然概率,最后将观测似然概率和先验概率代入贝叶斯模型计算显著图。本文算法的框图如图1所示。
1.1 超像素线性分割
目前在显著性检测模型中,规则的图像块(patch)[16]、超像素(superpixel)[17]、分割(segment)[18]是常用的3种过分割算法。图像块分割计算量小,包含较多的灰度和颜色信息,但是这种简单分割不能凸显目标边界,使得前景区域图像块中包含背景噪声。分割能够在一定程度上贴合显著目标的边界,但分割结果大小不均匀,且在复杂背景下分割效果不稳定。和上述两种算法相比,超像素在大小均匀的前提下,包含更多的底层和中层信息,如颜色特征、位置特征、纹理特征等,并且能够较好地保持目标边界。
针对算法计算时间和分割区域大小不一的问题,ACHANTA等[19]提出SLIC超像素分割算法,以LAB颜色空间的五维向量(x,y,l,a,b)作为距离度量工具,通过像素间的颜色相似程度以及像素间的空间位置关系进行图像分割。该方法通过对图像像素的聚类,保持全局边缘不变,把图像分割为一系列均匀紧凑的超像素,在运行时间、分割效果等方面与人们的预期要求一致。SLIC超像素分割算法中使用的颜色欧式距离和空间欧式距离为
式中:dc表示像素间的颜色欧式距离;ds表示像素间的空间欧氏距离;D′表示像素间的最终距离;S为控制分割紧密程度的一个常数,S=[KF(][SX(]NK[SX)][KF)],其中N表示整幅图像中像素点个数,K为分割的超像素个数。图2为超像素分割结果。