无人机遥感在高山峡谷区崩塌地质调查中的应用
2021-01-26李小玲胡才源孙全福吴齐林
李小玲,胡才源,孙全福,吴齐林
(1.贵州省地质环境监测院,贵州 贵阳 550081;2.华北水利水电大学,河南 郑州 450000)
崩塌是高山峡谷地区普遍发育的地质灾害之一,在地质环境渐变过程中,裸露的岩体易被多组结构面切割,形成临空,在重力、风化、根劈等作用下失稳,具有随机性、突发性、隐蔽性、危害大等特点。其成因机制复杂,一般受地形地貌、岩土体工程地质类型、地质构造条件、水文气象条件、区域地壳稳定性和人类工程活动等多种因素的共同制约[1-2]。在DZ/T 0261-2014《滑坡崩塌泥石流灾害调查规范(1∶50 000)》[3]中提及崩塌灾害野外调查应采用以实地量测为主的调查方法,这无疑给地形复杂、相对高度和地面坡度均较大的山地地质调查带来了极大的难度,给调查人员的人身安全带来了隐患。
无人机遥感为地质灾害调查行业注入了新鲜血液。无人机遥感综合利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、GPS 差分定位技术和遥感应用技术,能自动化、智能化、专用化地快速获取国土资源、自然环境等空间遥感信息,具有快速获取高分辨率、高精度、高时效的遥感数据影像,机动性强,超低空飞行,结构简单和经济便捷等优势[4],不仅降低了野外近距离作业的风险,而且提高了工作效率,保证了资料的完整性,实现了成果输出的可视化,是目前国内地质灾害调查行业争相研究的热点课题之一。李珊珊[5]等运用无人机遥感技术对云南省盈江县5.8 级地震灾区的房屋倒损情况进行了实物量分析,为灾害应急监测评估建设提供了借鉴;彭双麒[6]等通过对无人机航拍数据制作的纳雍普洒村崩塌DSM 模型的堆积物粒径进行统计,分析得出碎屑流堆积物粒度分布与崩塌运动特性的重要关系;田尤[7]等基于空间高分辨率数字正射影像(DOM)对甘肃天水麦积区幅内地质灾害进行了解译,提出崩塌解译侧重于灾害体轮廓、色调区分的思路,对今后崩塌灾害解译具有指导意义。
2018 年2 月14 日,受短时强降雨和凝冻气候的影响,贵州大方县法启村火车站东侧发生危岩体崩落,导致两户村民房屋受损,长30 m 的被动防护网部分受损(图1),所幸无人员伤亡。经初步调查发现,该陡坡地质环境相当复杂,崩落危岩体周边为崩塌群,相对高度>500 m,坡面坡度>70°,其面上垂直节理裂隙发育、岩体破碎,每逢暴雨,时有块石掉落,对坡脚下居民生活安全带来了严重威胁,因此对该崩塌群进行施工治理迫在眉睫。为快速开展本次崩塌群地质灾害应急调查,充分考虑无人机遥感的机动性、灵活性、高精度等特点,本文通过工作流程设计、关键技术方法控制,获取了贵州大方县法启村火车站东侧崩塌群的遥感影像数据;再通过影像处理软件,结合像控坐标点,解译得到崩塌群的位置、方量等信息,生成基于CAD 的大比例尺地形图,为该崩塌群地质灾害精准治理提供科学依据。
1 无人机遥感
在贵州大方县法启村火车站东侧崩塌群地质灾害调查中,本文选用了易于操作,携带方便,起飞、降落不受场地限制,自带GPS 信息,具有精准悬停能力的大疆Inspire 2 无人机系统。无人机、遥控器和相机传感器的主要参数如表1 所示。机上搭载了DJI FC6520相机传感器和影像存储系统,组成了基于空中航拍的测量系统(即航测系统),辅以航线规划系统,在遥控系统的控制命令下,实现了终端实时状态数据监视和实时图像传输功能(即地面控制系统)。其中,相机传感器具有高达2 080 万像素、每秒20 帧的DNG 无限连拍技术,使得快速获取的影像数据不会发生大量偏移、扭曲变形,提高了后期影像数据的处理速度。影像数据采集结束后,通过影像储存系统导入电脑等硬件、软件系统进行结果输出(即影像数据处理系统)。无人机遥感框架体系如图2 所示。
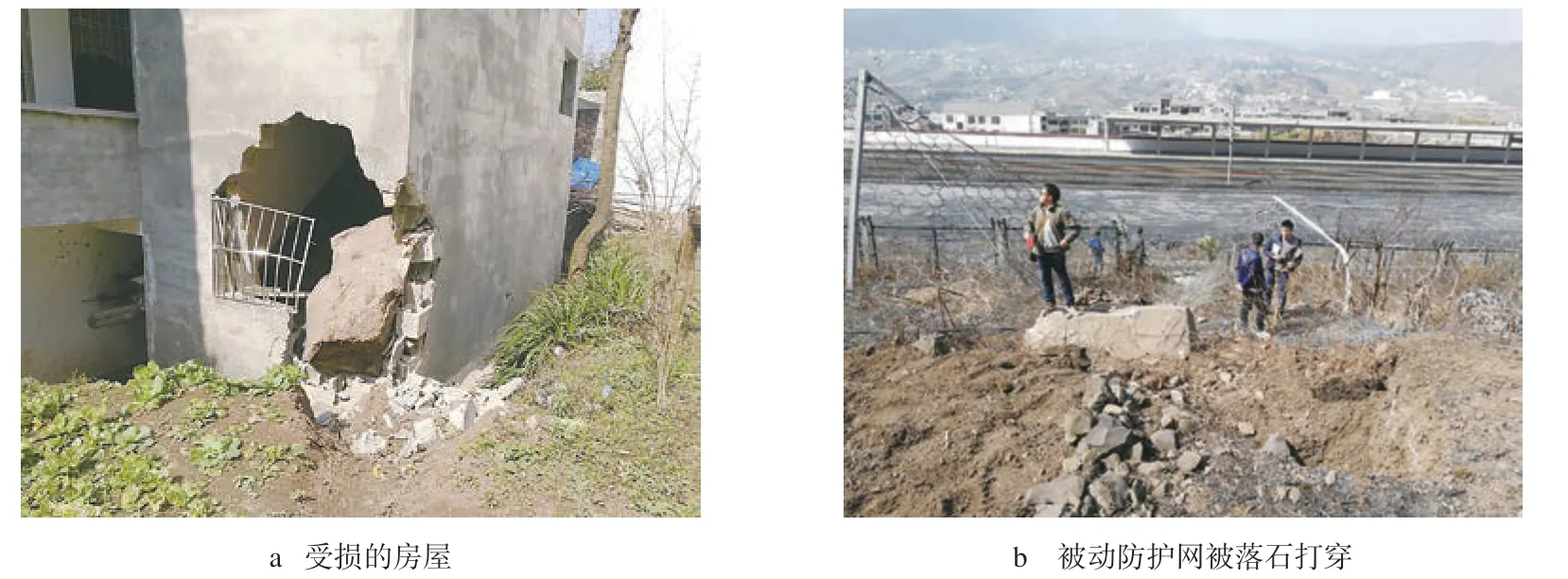
图1 野外现场调查
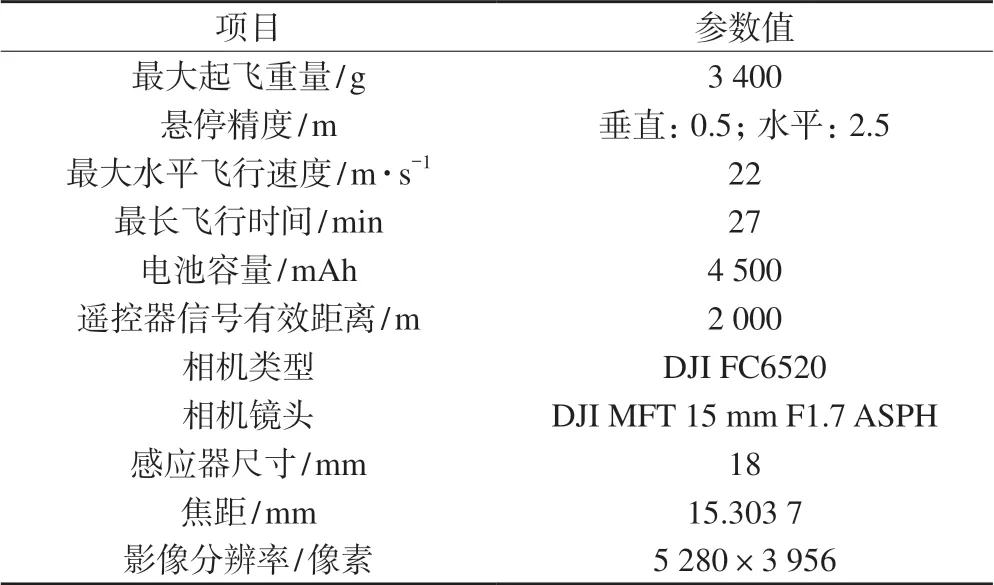
表1 无人机、遥控器和相机传感器的主要参数
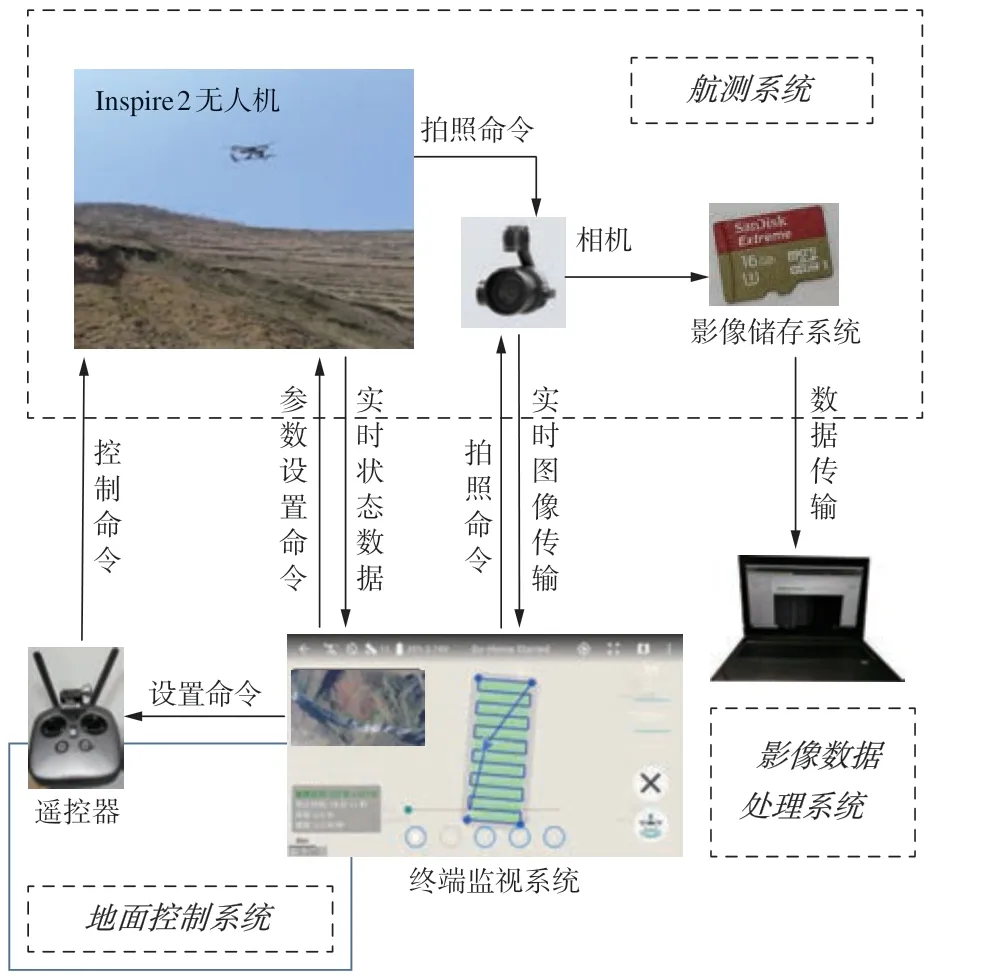
图2 无人机遥感框架体系
2 关键技术方法控制
在操控无人机遥感获取高精度影像数据的过程中,需控制好5 个关键技术。
2.1 野外地形气候条件分析
在所有电池(包括遥控器)都充满、系统结束更新的条件下,实地了解飞行区域的地形条件、气候条件、电力通信设施等外在因素[8]对无人机遥感及其所获取影像精度的影响。通常,选择晴天、观感好的天气进行航测任务,且无人机距离地表高度控制在50~150 m之间,飞行过低需要更多的航线和电池支持,飞行过高则会降低影像的分辨率。
2.2 像控点测量
目前市场上的无人机(包括大疆Inspire2)均带有GPS 定位系统,但在高精度航测中,其地理坐标信息达不到国家基本比例尺地形图要求[9],因此必须引入基于GPS RTK 的像控点测量。由于本次航测区域地质条件复杂,在满足整个区域均匀布控且无人机能清晰拍摄到像控点的情况下,取位置明显可辨(如裸露的基岩、乡村路)、重叠率高的5 个点作为控制点,以提高影像数据的处理精度。像控点分布如图3 所示。
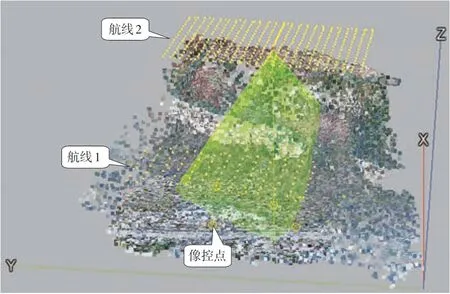
图3 调查区航线规划与影像空间位置
2.3 航线边界条件确定
贵州大方县法启村火车站东侧崩塌群的地形特点为:受威胁群众、房屋较密集地位于崩塌群下方的平缓斜坡上,崩塌群灾害体接近垂直陡立,与受威胁区域水平距离在150 ~350 m 之间,竖直距离在120 ~300 m 之间,崩塌群与受威胁区之间存在坡度约为35°的陡缓斜坡地带。因此,本次飞行范围以崩塌群和受威胁区为对象,左右范围各扩展300 m,无人机遥感的相机镜头采用垂直朝下拍摄(即倾斜角为0°),飞行高度控制在200 m 以内,以获取更高精度的影像数据。
2.4 影像获取
通过卫星影像可知,崩塌群坡顶与坡脚的高差接近500 m,地形复杂。根据国家比例尺和成图精度等规范[10]要求,在保证航线覆盖崩塌群和受威胁区域的前提下,为提高影像地面分辨率、高效提取和匹配影像,本文利用航线规划软件设置上下两条航线任务(图3),且两条航线全覆盖像控点,与遥控器链接,由无人机遥感执行操作命令,详细航线参数如表2 所示。飞行4 个架次,航行速度约为6 m/s,焦距为15.303 7 mm,地面分辨率为0.43 m,共获取调查区崩塌群509 幅影像数据。

表2 飞行航线参数设置
2.5 结果输出
由于Context Capture 数据处理系统具有较好的容错性,能快速处理非量测型相机获取的影像数据,自动读取影像POS 数据、相机参数、姿态数据等信息,因此本文首先根据共线条件方程进行自由网平差[11],过滤畸变较大的航摄影像图,以降低相机自身性能、风力作用等对测量精度的影响;然后将5 个地面像控点坐标信息刺到相片上,再一次对影像数据进行空三测量加密,完成相片坐标系到测量坐标系的转换,从而使每张有效的照片均具有绝对的空间坐标;最后通过空三测量加密后生产的三维重建模型,得到DOM 和DSM 切块,利用拼接软件对切块进行处理,生成调查区完整的DOM 和DSM 模型。DSM 模型通过构网算法生成TIN,TIN 经线性插值和最邻近重采样生成DEM(图4),在测图软件中导入DEM 生成1∶500 地形图。
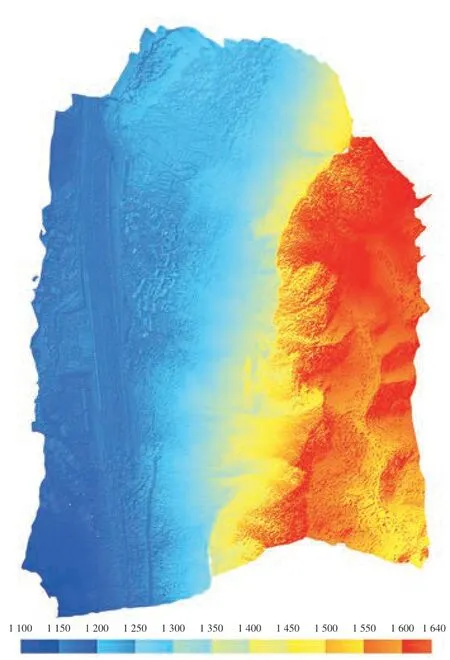
图4 DEM 高程数值模型
3 模型精度评价
中误差模型能反映检测点的内插高程与真实高程的接近程度,是衡量各种分辨率DEM 精度常用的数值模型,具有计算简单、快速,能方便表达单个离散点的误差等优点[12]。本文选取一定数量且均匀分布在坡面上的检测点,利用野外GPS RTK 获得检测点的平面坐标,并与DEM 模型坐标值进行中误差计算。
中误差的计算公式为:
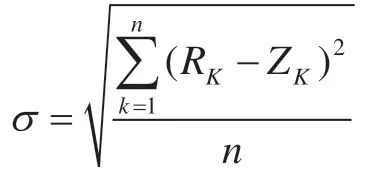
式中,σ为DEM 的中误差;n为抽样检查点数;ZK为现场GPS RTK 测量获得的平面坐标;RK为DEM 内插坐标。
由于贵州大方县法启村火车站东侧崩塌群地形条件相当复杂,上半部分为悬崖陡壁,下半部分为缓倾斜面,在进行DEM 精度评价时,本文选取调查区上半部分陡倾坡面内的10 个点,下半部分缓倾坡面内的7 个点作为现场抽样检测点,检测点的分布情况如图5所示。通过计算得到的野外GPS RTK 测量的平面坐标与对应的DEM 内插坐标值的中误差如表3 所示。
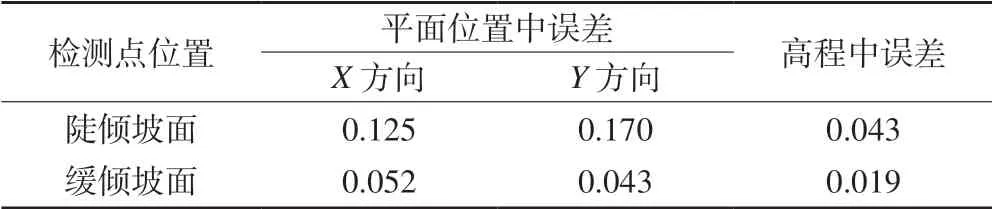
表3 DEM 中误差结果/m
由表3 可知,DEM 的中误差均小于表4 中的值,符合GB/T 23236-2009《数字航空摄影测量空中三角测量规范》中的要求,说明由无人机遥感航摄生成的三维数值模型的精度是较高的,可直接作为本次地质灾害调查与勘查设计的基础资料,为调查人员无法直接爬上崩塌群进行详细调查作补充。不仅如此,DSM 模型能反映地表地物的真实情况,相较于过去的传统遥感影像,道路、房屋、斜坡、裸露岩石、崩塌堆积体等清晰可见,形成了非常直观的立体模型;还具有可量测性,如崩塌体的长度、宽度、高度、方量、崩落轨迹等,能为该崩塌群的精准设计、治理提供科学依据。
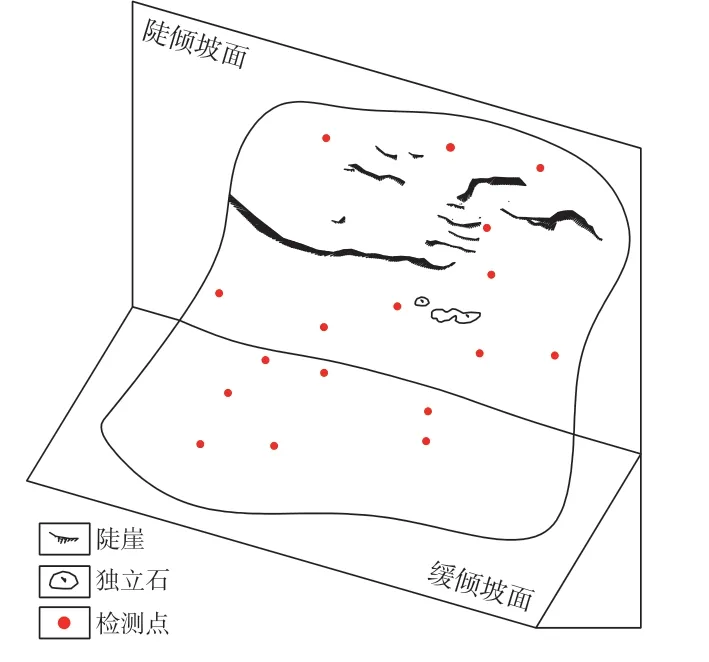
图5 现场检测点分布示意图

表4 连接点对最近野外控制点平面位置与高程中误差[13]
4 崩塌群基本信息的提取
由图6a 可知,崩塌群位于法启村火车站东侧,斜坡体上大部分基岩裸露,表层有少量的薄层状残坡积土,长有小灌木、杂草等;坡顶高程为1 540~1 600 m,下部受威胁区的高程在1 130~1 180 m 之间,崩塌危岩体堆积区高程在1 140~1 200 m 之间;2018 年2 月14 日发生块体掉落后露出亮白色的新鲜岩面和块体运动轨迹,体积约为2 m3,运动轨迹斜长467 m。坡脚下无规律分布的大量剥离母岩的孤石、块石(图6b),形态各异,体积为1~10 m3不等,在暴雨、凝冻等外界因素影响下,经常发生块石滚落,主要分散于斜坡坡脚法启村火车站围墙外侧和村民房屋周边。
根据现场地面调查结果,结合影像数据、三维模型分析发现,整个崩塌群存在3 个较明显的危岩体(B 区、C 区和D 区),其中B 区位于陡崖下方,高33 m、长50 m、宽2 m,危岩体体积约为3 300 m3,岩体节理裂隙发育,发育有一组相互垂直的节理面,其产状为243°∠5°和207°∠80°,裂隙张开度为1~10 cm,危岩体周边植被发育,底部基座岩体破碎(图6c);C 区位于陡崖上方,整个危岩体被节理裂隙切割,形成各种形状的块体,且岩体每厚4 ~8 m 夹薄层泥岩、泥灰岩,增加了危岩体在暴雨、根劈、凝冻等外界因素作用下掉落的速度(图6d);D 区为两个独立垂直的危岩体,与陡崖形成宽约30 m 的裂缝,左侧岩体中部一条裂缝自上而下贯穿到底部,形成“V形缝”,缝宽为5~80 cm;右侧岩体中下部存在一条大裂缝,裂缝下面为微型岩腔,进深约为5 cm(图6e)。
在尽可能不破坏调查区自然环境的条件下,本文提出以下处置建议:①对受损房屋的居民进行搬迁;②修复被动防护网;③沿村民房屋靠山一侧设置落石槽和挡墙;④对B 区和C 区上的松动、凌空岩体进行削方清除;⑤采用高强度混凝土对D 区进行裂缝填充加固;⑥加强群防群测,尤其是强降雨期间,有块体崩落时,根据撤退方案有序撤离,保证居民的生命财产安全。
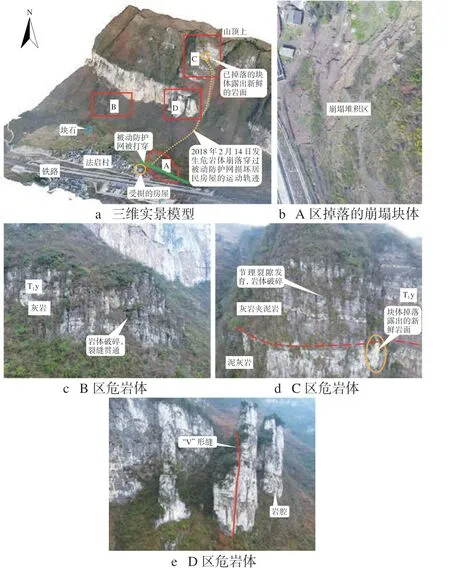
图6 无人机遥感调查成果图
5 结 语
本文基于无人机遥感对贵州大方县法启村火车站东侧崩塌群地质灾害进行了应用调查研究,详细解译了该崩塌群的基本特征。
1)在地质环境条件非常复杂,相对高度和地面坡度均很大的山地,采用无人机遥感进行航摄不仅能快速获取高分辨率影像数据,降低野外近距离调查危岩体的作业风险;而且能提高工作效率,保证资料的完整性,实现成果输出的可视化。
2)在操控无人机遥感获取高精度影像数据的过程中,首先应考虑地形、气候等客观因素,以保证影像清晰,尤其是在高山峡谷区,地形复杂,常年多云多雨多雾,对无人机摄影精度的影响较大;其次应考虑像控点布设与测量、航线边界条件的确定等主观因素,使得模型输出能满足设计、使用要求。
3)通过中误差模型对DEM 的精度进行评价,结果表明,由无人机遥感影像构建的三维数值模型的精度较高,可直接作为地质灾害调查与勘查设计的基础资料,为崩塌群地质灾害精准治理提供科学依据。
