温控型超磁致伸缩驱动器的设计与实施方式
2021-01-25张贤才郭恩平
张贤才 杨 博 郭恩平
(湖南科技学院 土木与环境工程学院,湖南 永州 425199)
传统的超磁致伸缩驱动器具有诸多优点,如响应速度快、可靠性好等,但其线圈发热引起的相关变形也不容忽视,这将影响驱动器的输出精度。为了改善这一缺陷,作者设计了一种温控型超磁致伸缩驱动器,不仅具有传统驱动的优异性,而且具有自动控制温度、性能检测等功能。
1 设计方案
为了克服传统超磁致伸缩驱动器存在的因发热引起的变形等问题,本文设计一种新型的温控型超磁致伸缩驱动器,见图1 至图4。
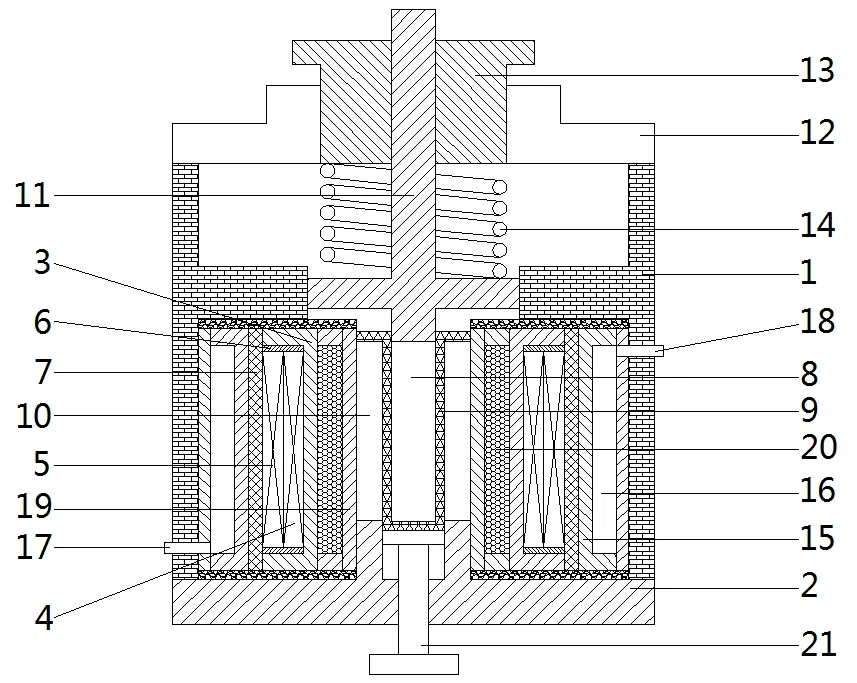
图1 驱动器示意图
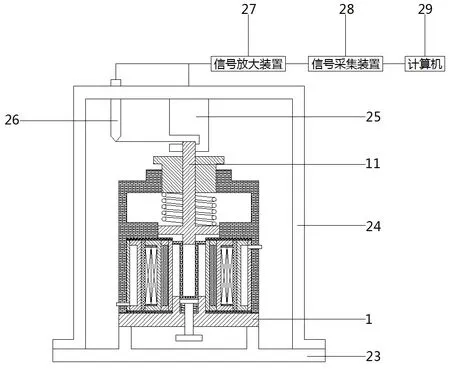
图2 检测装置示意图
图3 磁致伸缩棒的结构示意图
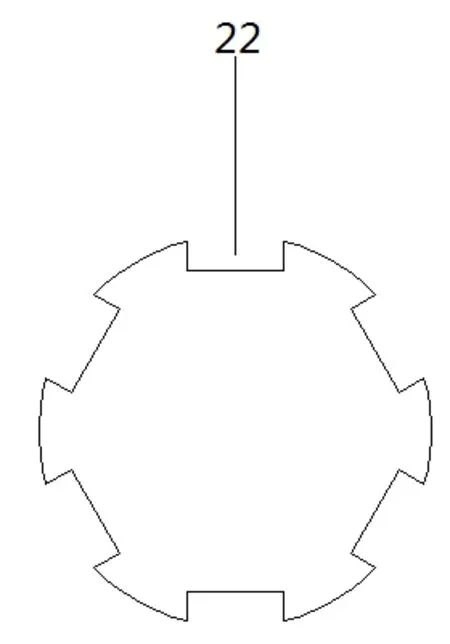
图4 超磁致伸缩棒的侧视结构示意图
图 1 至图 4 中:1-壳体、2-底座、3-线圈骨架、4-驱动线圈、5-偏置线圈、6-隔热板、7-永磁铁、8-第一超磁致伸缩棒、9-U 形筒、10-第二超磁致伸缩棒、11-输出顶杆、12-顶盖、13-预紧螺母、14-预紧弹簧、15-水冷机构、16-水冷腔、17-进水口、18-出水口、19-相变温控筒、20-相变材料、21-顶调节螺栓、22-涡流直槽、23-支撑底座、24-支架、25-位移传感器、26-压力传感器、27-信号放大装置、28-信号采集装置、29-计算机。下文中将以序号表示相关的部位构件。
针对图1 至图4 所示的温控型超磁致伸缩驱动器,分别阐述磁场产生装置、冷却装置、预紧装置、定位装置和检测装置的设计技术方案:
(1)磁场产生装置:包括设置在 1 内部下侧的3 和设置在3 外侧的7,在3 的外侧绕接有4,在4 的外侧绕接5,在3 的内部与4、5 的接触处设有6,在 3 中间设有空腔且在空腔内部安装有9,在9 的开口端内部放置有8,在9 的外侧且在3 的空腔内部左右对称放置有两个10,10 的顶端均与9的外侧顶端相抵接,10 的底端均与2 相抵接,第8的上侧设置有11。
(2)冷却装置:包括设置在 1 内部且位于 7外侧的15,包括16 和与16 相连通的17 和18,均设置在1 的外壁上;设置在3 的空腔内部且位于10外侧的19,在其内部空腔中填充有20,19 与3 相接触且为过盈配合。
(3)预紧装置:包括12、13、14,在1 的顶端设有12,12 上螺接有13,在13 上开设有通孔,11 穿过13 上的通孔延伸至12 外侧,在11 位于1内部的一段外壁上套接有14。
(4)定位装置:包括21,21 的顶端延伸至1内部并与9 的封闭段固定连接。
(5)检测装置:包括23 和24,23 和24 之间通过螺栓进行连接,在 24 上设置有用于进行位移检测的25 和用于进行压力检测的26,通过11 分别与 25 和 26 相连接,25 和 26 均与 27 连接,27 连接28,信28 与29 连接,当11 产生位移和力的输出时,25 和 26 产生的电压变化经 27 放大后传入28,28 将数据传入 29,用于快速准确的进行测试和数据的后续处理分析。
2 实施方式
结合图1 至图4 所示的温控型超磁致伸缩驱动器,说明其实施方式。使用超磁致伸缩驱动器时,将4 通电,4 产生的磁场使8 产生长度变化,从而带动11 进行伸缩运动,从而实现驱动工作;5 产生的偏置磁场能使10 发生长度变化时带动9 进行上下运动,通过9 把输出的力和位移传递给8,从而使8 能够输出两倍的力和位移,提高了驱动器的输出位移和输出力。
采用15 和20 组合进行温控,用15 在4,5 外侧进行降温,防止外壳的侧面受热变形,用20在4,5 内侧进行降温,抑制8、10 的温升变形。在3 的内部与4,5 的接触处设有6,在整体上对驱动器进行温升抑制,不会造成外壳的上、下部分受热变形,从而提高驱动器的位移控制精度;
通过调节13 的位置和14 的弹性大小调节预紧力的大小,从而使得超磁致伸缩的能量转换效率总体处于较佳范围内;通过调节螺栓,对9 的位置进行固定,实现对9 位置的调节,从而实现11 的位置调节,满足不同驱动位置的使用要求。
为有效的降低驱动器的漏磁现象,1,2,3,9和11 均为导磁材料,其和8 和10 形成闭合磁路,闭合的磁路不仅能很好的降低漏磁,还可以防止与外界的仪器发生干扰。
通过11 分别与25 和26 相连接,两者均与27连接,27 连接28,最后与29 连接,当11 产生位移和力的输出时,25 和26 产生的电压变化经27 放大后传入28,28 将数据传入29,用于快速准确的进行测试和数据的后续处理分析。
3 结束语
本文设计一种温控型超磁致伸缩驱动器,不仅具有传统驱动器的特点,更是采用水冷机构和相变材料组合进行温控的性能,从而保证驱动器的输出精度;同时利用传感器、信号放大装置和计算机构成的测试系统对驱动器的驱动性能进行检测,其测试时间短,测试效率和测试精度高。