电弧炉电极调节系统GFLC算法的研究*
2021-01-22李强,卫敏,李刚,王星
李 强,卫 敏,李 刚,王 星
(西安理工大学 自动化与信息工程学院,陕西 西安 710048)
0 引言
控制炼钢工艺中能量输入的核心是电弧炉电极调节系统,电极调节的功效对于降低电弧炉炼钢工艺的能耗、缩短冶炼时间、提高冶炼效率具有重要意义[1];此外,电弧炉系统是一个复杂的控制系统,具有典型的非线性、时变、随机干扰和三相耦合特性,若确定了电极调节器系统模型,会更有效地控制电极[2]。在电弧炉整个炼钢的过程中,电极调节系统是整个系统高效运行的关键。采用有效的电极控制算法,可使电弧炉炼钢功率消耗、电极消耗及出钢时间都得以减小。
当前,大多数工业钢厂实际使用传统的PID控制与手动操作相结合来控制电极系统。但由于PID控制常常落后于电弧炉的实际情况,因此不能保证控制精度和实时性,电极调节工作极为不稳定,导致运转效率降低和功耗增加[3]。学者们研究了调节电弧炉电极升降装置的智能方法,取得了许多成果。文献[4]提出了基于模糊神经网络的电弧炉控制方法;文献[5]采用神经网络算法来调节电弧长度;文献[6]采用控制弧长的模糊PID控制方法。但是,这些控制方法在实际应用控制中并不理想,因此,电弧炉电极控制器有必要进行深入研究。
本文采用一种新型编码的遗传模糊逻辑控制器(GFLC)来调节电弧炉电极。使用遗传算法依次学习逻辑规则和隶属函数,是一种无需主观预设逻辑规则和隶属函数的双层迭代算法。上层利用下层调整的隶属函数求解逻辑规则的组成,下层使用从上层学习的逻辑规则来确定隶属函数的形状。为了克服直接参数编码的缺点,本文提出了一种新的编码方法,可以更有效地调整隶属函数。
1 模糊逻辑控制器(FLC)
1.1 模糊逻辑控制器的组成
模糊控制系统由文献[7]提出,在给定的条件下,利用模糊逻辑规则形成一种逼近专家感知和判断的控制机制。模糊控制器框图如图1所示,其中4个基本组件介绍如下:

图1 模糊逻辑控制器的框架
(1)数据库
数据库由语言变量 Ai1,…,Ain和 Bi的特定隶属函数构成,将输入变量转变为模糊变量。
(2)规则库
规则库由有限个逻辑规则组成,从中形成推理机制。
(3)推理机
逻辑规则中的操作符构成推理机制。通常,逻辑规则使用取最小值(AND)或取最大值(OR)作为状态变量之间的连接运算符。
(4)去模糊化
去模糊化是将所有激活的逻辑规则的推理结果合成为清晰的输出。
1.2 遗传模糊逻辑控制器
遗传模糊逻辑控制器与模糊逻辑控制器最大的区别在于数据库和规则库更为主观和复杂。学习逻辑规则和调整隶属函数是FLC系统的两个关键组件。遗传算法(GA)已被证明适用于解决组合优化和参数优化问题。然而,先前大多数研究都采用GA预先设定逻辑规则来校准隶属函数,或者选择具有给定隶属函数的逻辑规则,如果只学习了一个组件,另一个组件往往是主观设定的,因此可能会降低FLC的适用性。本文采用遗传算法构建具有学习过程的FLC系统,简称为遗传模糊逻辑控制器(GFLC),不仅可以避免由于逻辑规则和隶属函数的主观设置而导致的偏差,而且可以大大提高控制性能。如果同时学习两个部分,则通常需要非常长的染色体,因此可能需要极大的搜索空间并降低学习率。为了避免这些问题,本文提出了一种无需主观预设逻辑规则和隶属函数的双层迭代进化算法,采用遗传算法依次学习逻辑规则和隶属函数。
2 控制器制定
2.1 逻辑规则的编码方式
文献[8]提出的编码方式可以有效地缩短染色体长度,从而节省计算机内存和搜索空间,本文也采用这种编码方法来选择逻辑规则。以两个状态变量和一个控制变量为例,如果每个变量具有5个语言程度(NL-1:负大;NS-2:负小;ZE-3:零;PS-4:正小;PL-5:正大),则染色体长度是25,基因取0~5的整数,其中0表示排除规则,其他数字表示包含规则和控制变量的5个语言学程度。E和Ec分别代表电弧电流误差及误差率,R表示控制输出值,该编码方法如表1所示。例如,基因序列0002040010000001000030000的染色体将表示选择5个逻辑规则:
(1)规则 1:如果 E=NL,Ec=PS,则 R=NS(E=1 负大,Ec=4正小,R=2负小)。
(2)规则 2:如果 E=NS,Ec=NL,则 R=PS(E=2 负小,Ec=1负大,R=4正小)。
(3)规则 3:如果 E=NS,Ec=PS,则 R=NL(E=2 负小,Ec=4正小,R=1负大)。
(4)规则 4:如果 E=PS,Ec=NL,则 R=NL(E=4 正小,Ec=1负大,R=1负大)。
(5)规则 5:如果 E=PL,Ec=NL,则 R=ZE(E=5 正大,Ec=1负大,R=3零)。
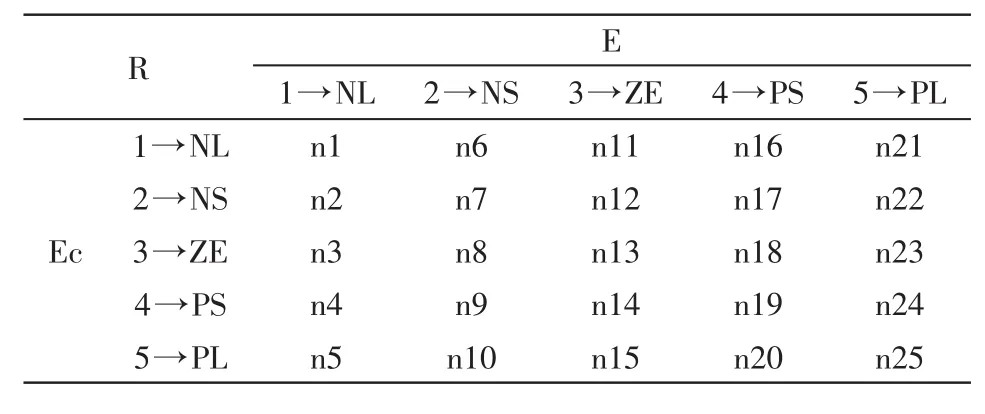
表1 逻辑规则的编码方式
2.2 隶属函数的编码方式
本文使用的隶属函数是三角函数,考虑到一组三角形的模糊集合,三角形隶属函数语言度的参数(即3个点的坐标)分别为。其中是三角形的右边点是三角形的中心点是三角形的左边点。根据模糊集合参数坐标,则需要针对5个语言学度的变量校准 15个参数。附加的约束条件是:对于任何具有相同程度的模糊数为和对于具有不同程度的模糊数为。因此,如果使用GA来直接调整上述参数,那么由于附加的所有约束条件,搜索性能将显著恶化。为了克服这个问题,本文提出了一种自设定规则来调整隶属函数的新编码方式。
在不失正常情况下,本文假设模糊集合的第一个和最后一个元素分别是左倾和右倾直角三角形,其他三角形为等腰三角形,具有5种语言程度的变量需要校准8个参数,如图2所示。本文提出这8个参数的顺序公式如下:

其中,Fmax和Fmin分别是变量的最大值和最小值。之间的顺序是不确定的。为了保证论域不混乱,调整这8个参数,9个位置变量 h1~h9被设计如下:


图2 成员函数的编码方法

为了获得两个有效数字,每个位置变量也由图2中描绘的4个实际编码基因表示。位置变量的最大值是99.99,最小值是0。因此,在两个状态变量和一个控制变量(每个具有5个语言学程度),染色体由108个基因组成。
2.3 遗传算子
由于GFLC模型中的基因不是二进制编码的,因此不能使用简单的遗传算法。相反,使用文献[9]提出的最大最小算术交叉和非均匀突变。下面给出简要描述:

其中,β是参数(0<β<1),t是迭代数。
(2)非均一突变

其中,a随机取二进制值 0 或 1。函数 Δ(t,z)返回[0,z]范围内的值,使得 Δ(t,z)随着 t增加而趋于 0:

其中,h的取值范围为[0,1]之间的随机数,T是最大迭代数,b是给定的常数。在式(15)中,返回的值 Δ(t,z)随着演化的进行而逐渐减小。
2.4 迭代进化算法
本文提出了一种双层迭代进化算法,应用在遗传模糊控制器(GFLC)的逻辑规则和隶属函数的选择上。上层是利用下层调整的隶属函数来求解逻辑规则的组成,下层是使用最优的逻辑规则来确定隶属函数的形状,如图3所示。实现具体步骤如下:
(1)初始化 s=1。
(2)选择逻辑规则。产生具有p染色体的初始群体。每个染色体有个基因,每个基因随机取一个[0,dn+1]中的整数,根据现有的隶属函数计算所有染色体的适应度值,然后选择、交叉、突变。当成熟率(人群中同一染色体的比例)达到给定常数来设定的η,测试停止。
(3)调整成员函数。用染色体产生初始群体。每个染色体有36(n+1)个基因,每个基因从[0,9]中随机取一个整数。根据现有的逻辑规则计算所有染色体的适应度值。然后进行选择、交叉、突变。当成熟率(人群中同一染色体的比例)达到给定常数来设定的η,测试停止。设fs是第s代人口中最大的适应度,当测试停止后,使s=s+1。
(4)测试停止。如果(fs+1-fs)≤ε,ε是一个任意的小数字,即停止,现任逻辑规则和隶属函数是最佳学习结果;否则,转到步骤(2)。
3 仿真实验及其分析
为了验证上述应用遗传模糊逻辑控制器算法,进而优化电弧炉电极调节方法的有效性,以某钢厂80 t 10MVA变压器的电极调节系统为例,电极调节系统主要包含了比例阀执行系统、电极控制器、液压传动系统、主电路系统及反馈系统部分。电弧炉电极调节器框图如图4所示。
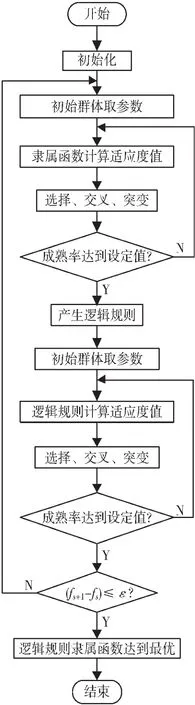
图3 GFLC双层迭代算法流程图

图4 电弧炉电极调节器框图
电弧炉液压传动系统可调节电极升降速度,可以看作是一个欠阻尼的二阶系统[10],传递函数为:

比例阀执行系统可近似看作一个比例环节,传递函数为:

机械传动系统的输出是电极的位置,其输出主要是速度的变化量,可以用一个积分环节进行描述,其传递函数为:

主电路控制系统的弧长与弧流关系可描述为:

其中,u表示电弧弧长,输出为电弧电流。
电弧炉弧长与弧流的非线性关系如图5所示。

图5 弧长与弧流的非线性关系图
电弧炉电极调节控制器具有2个状态变量(弧流误差、弧流误差率)和1个控制变量(弧流输出值)。所有变量由三角形隶属函数来表示,总共有25个潜在的逻辑规则。每个规则有一个基因,染色体中有25个基因。需要校准36个位置参数以调整隶属函数。每个参数有4个基因,总共有108个基因位于染色体中。

图6 GFLC与传统PID的输出响应
利用遗传模糊逻辑控制器算法,给定电弧电流40 kA时,电弧炉电流仿真结果如图6所示,由图中可以看出,遗传模糊逻辑控制器比传统PID控制更加有效,弧流更加快速地达到稳定,遗传模糊逻辑控制器的调节时间比传统PID控制时间缩短了5 s,系统超调量也减少了10%。在实际的电弧炉炼钢过程中,弧长是非线性、时变的,为了更好地模拟出实际弧长,在t=20 s时加入了随机白噪声,从而达到实际弧长的非线性以及随机性,添加白噪声的仿真结果图如图7所示。由此得出,电极调节系统在扰动下,遗传模糊逻辑控制器相比传统PID控制有更好的控制性能。

图7 加入白噪声后的输出响应
4 结论
本文提出了一种EAF电极调节系统的非线性控制方法。首先,说明了电极调节器是一个复杂控制系统,针对这种复杂的时变系统,提出了GFLC控制算法来进行控制,该方法是利用遗传算法来构造模糊逻辑控制器的双层迭代进化算法。设计了一种新型的编码方式,克服了非线性不好控的问题,使得控制性能更加高效。传统PID控制方法针对非线性系统控制效果不理想,而GFLC通过选择逻辑规则和调整隶属函数来实时快速控制电极调节参数,从而节约电能,提升炼钢效率。