基于颗粒识别分析系统的碎屑流堆积物颗粒识别和统计方法研究
2021-01-21彭双麒
陈 达,许 强,郑 光,彭双麒,王 卓,何 攀
(成都理工大学地质灾害防治与地质环境保护国家重点实验室,四川 成都 610059)
碎屑流是一种高速远程溃散性滑坡,具有非常高的运动速度和极大的位移,速度在30 m/s 以上[1],具有极大的破坏力。为研究碎屑流运动特性及运动机理,有必要进行堆积物粒度定量分析,这也是碎屑流灾害研究的重点。传统颗粒的测量主要依靠人工,如需通过生成高分辨率数字地表模型(Digital Surface Model,DSM)对堆积物粒度进行人工解译[2-4],存在效率低、精度不高以及人为因素误差大等不足。
计算机数字图像处理技术具有自动化、高效快捷等特点,被广泛运用于颗粒识别。吴义祥[5]研究了土细观结构图像的定量分析系统,可以获取细小颗粒面积、最长弦长度等基本要素;施斌等[6]使用Videolab图像处理系统直接分析SEM 等照片,定量处理土颗粒微细形状、大小和比例关系;涂新斌等[7]通过Qwin软件处理颗粒二值图像,获得了颗粒数、长度、宽度等颗粒数字特征;梁双华等[8]提出Mapinfo-Photoshop计算方法,利用Photoshop 图像处理功能和Mapinfo的统计分析功能,对土颗粒图像进行信息提取,定量表征颗粒、孔隙的个数以及周长、平均孔径等参数,极大地降低了图像分析费用,提高效率;Bai Baojun 等[9]通过Imagej 软件,直接将页岩原始孔隙图像进行二值化处理,进而定量统计孔隙、颗粒发育情况,得出孔隙率。可以看出,这些研究都是为了定量化分析图像的细观特征,实现图像自动识别,得出孔隙、颗粒的结构参数和数量特征。但是,这些方法在以下关键问题上存在一定的缺陷:(1)设定研究最小颗粒粒径及较小粒径颗粒识别方法;(2)一个图像中可能有上千个颗粒和孔隙,形状复杂,分布不均,宏观特征参数已经不能满足研究需要,为此需要一些特定的参数,分析每个颗粒的形状、大小,以此来反映颗粒系统特征。
孔隙(颗粒)及裂隙图像识别与分析系统(Pores and Cracks Analysis System,PCAS),可以定量分析碎屑流堆积物粒度特征,准确获得堆积物颗粒结构的几何参数和统计参数,且操作简单,具有自动化和可重复等优点。PCAS 在颗粒识别中,存在着三个参数的选取问题:阈值(T)、孔喉封闭半径(r)、最小孔隙面积(S0)。该方法在滑坡堆积物粒度分析中具有很好的效果,但实用范例很少,目前仅彭双麒等[10-11]通过PCAS 系统研究了碎屑流堆积体,得出碎屑流堆积物颗粒分布的一般规律,但没有具体阐述PCAS颗粒识别系统的工作原理、参数意义以及参数选取方法。为此,本文通过PCAS 软件对贵州纳雍崩塌碎屑流堆积物颗粒特征进行分析,得出图像识别系统中阈值、孔喉封闭半径、最小孔隙面积合适的参数取值,为PCAS 在崩塌堆积物颗粒的定量研究中提供了一个高效可行的方案。
1 方法介绍
PCAS 图像识别步骤见图1。
首先将图像导入PCAS 软件,调整阈值(T)进行二值化处理,区分出孔隙和颗粒;然后选取合适的孔喉封闭半径(r)和最小孔隙面积(S0),最后孔隙和颗粒的各种几何参数将汇集于数据表,包括个数、长度、宽度、面积、形状系数、定向性等,并统计得到颗粒和孔隙的分形维数、表观孔隙率、面积概率分布指数等统计参数,实现孔隙和颗粒结构的定量分析。本次主要研究颗粒个数和长度两个参数。
PCAS 得出的参数都是以像素为单位,可以通过换算得到实际的几何参数,如式(1)、(2)[12]:

式中:R—图像的分辨率;
S、C—像素面积和像素周长;
St、Ct—真实面积和真实周长。
PCAS 主要由三个参数确定:阈值(T)、孔喉封闭半径(r)、最小孔隙面积(S0)。本节主要通过介绍这三个参数的选取意义,分析PCAS的原理与方法。
1.1 阈值(T)
首先获取崩塌堆积物的正射影像图,圈定分析的范围,获得适当的图片大小,即开始图像识别。在图像识别前,需要进行二值化处理,获得二值图像,PCAS 采用阈值分割法进行图像二值化[13],所谓阈值分割法,是基于影像图中各个组成要素的灰度值的不同,通过选择适当的灰度阈值将影像图转换为二值图像,根据图像中孔隙与颗粒的灰度值不同加以区分[14]。具体来说,图片由像素组成,而每一个像素是由红绿蓝(RGB)三原色分量组成,软件自动选取一个特征颜色值作为灰度值X(RGB),计算图像中各个部分的灰度值P(RGB)与这个特征灰度值的距离[12]:

与选取的阈值作对比,d小于阈值为黑色,识别为孔隙;大于阈值为白色,识别为颗粒;从而把图片识别成灰度图像(图2b)。
具体步骤为:起初设定较大的阈值,此时较多为颗粒的单元被识别为孔隙(黑色),再慢慢地减小阈值,直到黑色的细小颗粒单元被转化为白色,能清晰地识别出颗粒与孔隙,此时为较好的阈值。为了减少人为判断误差,通常对不同堆积区进行二值化处理,求取阈值平均值,作为选定的最终阈值。
1.2 孔喉封闭半径(r)
颗粒与颗粒间并不是完全分开,会有连接(图2b),在二值化过程中,颗粒通过细小连接,会被错误识别为一个颗粒。因此,PCAS 在识别过程中,会设定一个特定直径的孔喉封闭半径,定义为腐蚀结构元素的半径r,对图像做腐蚀运算[15]。当颗粒之间连接的直径小于2r时,则区分为两个独立区域,分开颗粒(图2c),再将剩余像素归并到颗粒上,实现颗粒与颗粒的自动区分[16]。

图2 PCAS 在T/r/S0=170/1/10时的颗粒识别结果Fig.2 PCAS particle recognition results at T/r/S0=170/1/10
1.3 最小孔隙面积(S0)
图片是由一系列像素点组成,当像素较低时,无法真实表征颗粒的真实形状,需要将这些像素点及噪声去除。因此,PCAS 识别程序中设定了可识别分析的最小孔隙面积,即设定一个面积识别下限,小于该值的颗粒面积都识别为杂点而被去除。在图2(b)可以看到二值图像中呈现为白色的细小杂点,设置最小孔隙面积,可以消除这些杂点(图2c),有效识别出颗粒。
PCAS 具有手动编辑的功能,对于颗粒不完整或较多明显杂点,可以通过界面的“Edit binary image”功能,手动修复,归并颗粒,区分出颗粒边界,减小系统误差。
2 PCAS 最优参数探索
以贵州纳雍普洒村崩塌-碎屑流为例,运用PCAS对其粒度进行分析,结合彭双麒等[2]的实测结果,研究PCAS 在崩塌碎屑流颗粒分析的应用,以及阈值、孔喉封闭半径和最小孔隙面积的参数选取。
2.1 研究区概况
彭双麒等[2]通过传统粒径统计方法,沿纳雍崩塌中部区域的主滑方向,将堆积区分为A1—A13 共13个区,每个区长100 m、宽50 m(图3)。通过生成地表数字模型(DSM),人工观测统计,得出每个区域颗粒粒径及对应数量。为了方便测量,粒径设定为颗粒对角线最大长度取值。
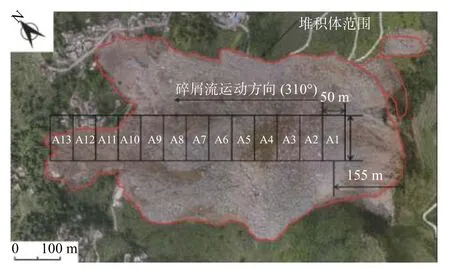
图3 崩塌堆积分区示意图[2]Fig.3 Partition diagram of the collapse accumulation body[2]
分别统计出每个区域0~1 m、1~2 m、2~3 m、3~4 m、4~5 m、5~6 m、6~7 m、7~8 m、8~9 m、9~10 m、10~17 m的粒径数量(识别最大粒径16.6 m),取值区间左开右闭。根据统计结果,绘制成累计级配曲线(图4),纵轴为小于某粒径颗粒的数量百分比,横轴为各粒径。

图4 分区颗粒粒径累计曲线[2]Fig.4 Aggregate curve of particle size in subsection[2]
为了更直观显示A1—A13 每个统计区域内大粒径与小粒径含量之间的关系,分别作出各区域0~2 m、2~4 m、4~6 m、大于6 m颗粒所占比例柱状图(图5)。

图5 各区域不同粒径等级所占比例Fig.5 Proportion of different grain sizes in different regions
2.2 PCAS 参数讨论
运用PCAS 对每个区域颗粒进行定量分析。不断调整阈值、孔喉封闭半径、最小孔隙面积,分别统计不同参数下对应的颗粒分布情况,找到合适的参数取值,分析不同参数条件下对研究结果的影响,验证PCAS 软件的准确性。
(1)PCAS 参数选取
导入图像,不断调整阈值,对13个区域用PCAS软件进行二值化处理。通过实际分析本次纳雍普洒村崩塌的图像数据,得出阈值在170时可以清晰地区分出颗粒与孔隙(图6)。
探究孔喉封闭半径(r)、最小孔隙面积(S0)的取值对PCAS颗粒识别的影响。不断调整孔喉封闭半径、最小孔隙面积合适的取值,并进行相应的组合。如图7所示,当r/S0=0.5/5(这里为像素,通过与实际半径、面积换算,r/S0=0.5/5=0.05 m/0.05 m2,即r单位为0.1 m,S0单位为0.01 m2)时,许多杂点及不需要的微小颗粒被识别,且颗粒与颗粒间不能有效分隔开;当r/S0=4/40时,较大颗粒也小于最小孔隙面积,不能识别出来;对比图2(c),当r/S0=1/10时,识别所得颗粒分布结果更能反映堆积物颗粒各粒径分布情况。因此,选取孔喉封闭半径r为1,2,3(单位为0.1 m,下同),最小孔隙面积S0为10,20,30,40(单位为0.01 m2,下同),互相组合(表1),找到合适的参数取值(各参数均以像素为单位)。
(2)PCAS 粒径统计结果
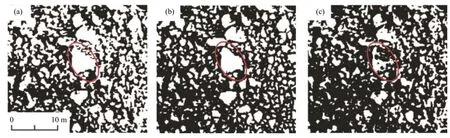
图6 PCAS 在不同阈值下的二值化结果Fig.6 Binarization results of PCAS at different thresholds

图7 PCAS 在r/S0=0.5/5 与r/S0=4/40时的颗粒识别结果Fig.7 PCAS particle recognition results at r/S0=0.5/5 and r/S0=4/40
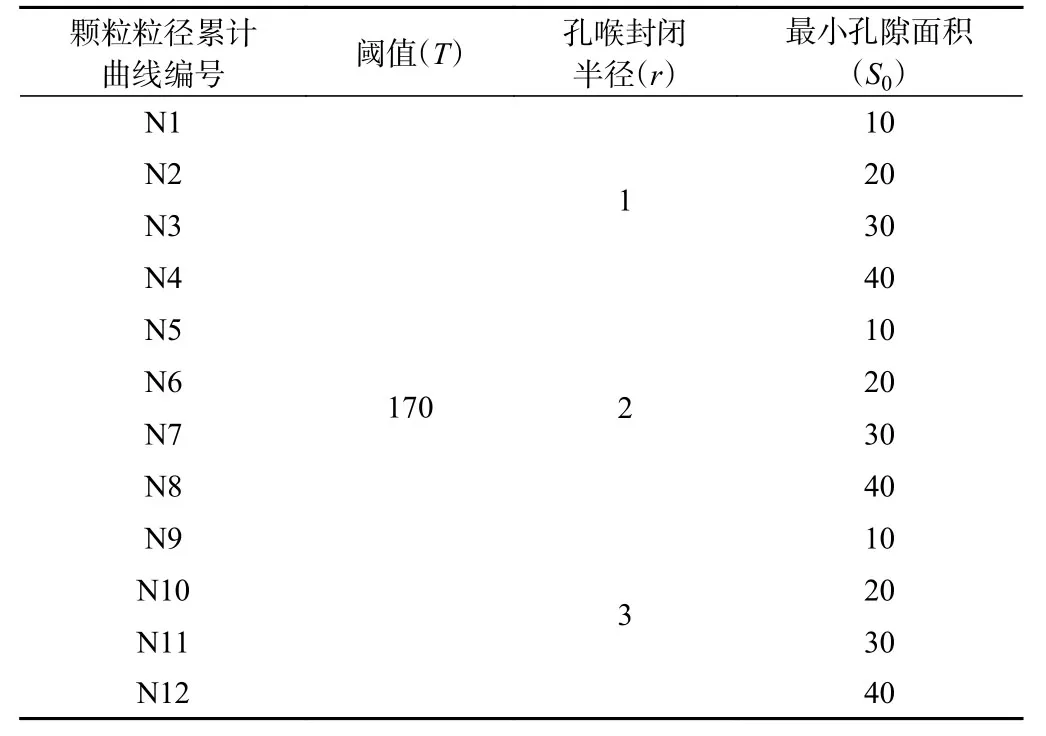
表1 三个参数的组合情况Table1 Combinations of the three parameters
由各个图像中颗粒的几何形态数据,统计出每个区域长轴在0~1 m、1~2 m、2~3 m、3~4 m、4~5 m、5~6 m、6~7 m、7~8 m、8~9 m、9~10 m、>10 m的粒径数量(识别最大粒径11.8 m),取值区间为左开右闭,绘制出颗粒粒径累计曲线。并分别作出各区0~2 m、2~4 m、4~6 m、>6 m 粒径所占比例柱状图。注意,PCAS 识别的是像素大小,每个区域图片像素为465×976,而实际尺寸为50 m ×100 m,由式(1)和式(2)换算,为方便统计,取1 像素等于0.1 m。
分别根据表1中的参数组合绘制颗粒粒径累曲线(图8)和各区域不同粒径等级所占比例柱状图(图9),图9中粒径百分比小于1%时没有标记。
由图8可知:
(1)A11、A12、A13 图像中粒径小于2 m的百分含量明显高于其他区域,说明运动距离越远,颗粒碰撞破碎越充分,小颗粒含量比重越大,分选越好。在阈值为170,孔喉封闭半径为2时,A1 图像中粒径小于2 m的百分含量也明显高于其他区域,曲线较陡,颗粒粒径级配差于其他区域。
(2)当孔喉封闭半径为1,2时,随着最小孔隙面积的变大,颗粒粒径小于2 m的百分比明显下降,但总的趋势不变;表明PCAS 在最小孔隙面积增大时,能去除较大的杂点,区分出有效颗粒,总的百分比就降低。但当孔喉封闭半径为3时,随着孔隙面积的变大,大粒径百分比无明显变化,小颗粒粒径百分比变小,小于1 m的粒径百分比大多在10%以下(除A11、A12、A13);这表明当孔喉封闭半径增加到一定程度时,许多颗粒被进一步分割成更微小颗粒,当最小孔隙面积较小时(这里为10),大量微细颗粒就被当作杂点去除,此时即使最小孔隙面积变大,粒径百分比也无明显变化。

图8 不同参数取值下各区域颗粒粒径累计曲线Fig.8 Accumulation curve of particle size in each region under different parameters
(3)以N2、N6、N10为例,当最小孔隙面积一定时,随着孔喉封闭半径的增大,颗粒粒径小于2 m的百分比明显下降,且级配变差。N10 条件下,每个区域粒径小于2 m的百分比分布在50%~90%,而N2、N6 小于2 m的百分比则在80%~95%;这表明随着孔喉封闭半径增大,形状不规则的大颗粒被腐蚀,分割为小颗粒,当小于最小孔隙面积时,被作为杂点去除,所占比重减小。
(4)小于3 m的颗粒百分比在每个区域的占比都在80%以上,而图4小于3 m的为70%以上,说明PCAS 相比人工计数,颗粒计数更精细,识别更完整,但总的效果相差不大,粒径级配曲线与实际情况相符,验证了PCAS 在碎屑流堆积物颗粒识别上的可靠性。
由图9可知:
(1)由图N1、N2、N5、N6可得,当孔喉封闭半径为1,2,最小孔隙面积为10,20时,各区域0~2 m 小颗粒所占百分比都在80%以上,大于4 m颗粒所占百分比都在4%以内;表明当孔喉封闭半径与最小孔隙面积较小时,各区域较多的小颗粒与杂点被识别,且不能被错误识别为单个颗粒。对比N3、N4、N7、N8,当孔喉封闭半径或最小孔隙面积增大时,0~2 m 小颗粒占比降低,大于4 m的大颗粒比重增加。
(2)由图N9、N10、N11、N12可得,当孔喉封闭半径为3时,各区域小于2 m的颗粒占比都具有先减小后增大的趋势,拐点在A3区;有3个明显波峰,极点在A2、A9、A12区,有三个明显波谷,极点在A3、A8、A10区。各区域4~6 m颗粒占比都在2%~4%附近,小于6 m的颗粒占比具有2个波谷,极点在A4 与A8区。各粒径占比分布情况与图5对比,基本吻合,接近真实值。
(3)对比图N9、N10、N11、N12 与图5,大于6 m颗粒占比在A3、A4、A5 三个区域与实际情况相符。图5中,0~2 m颗粒占比在A3、A4、A5区呈现波谷形态,但在PCAS 粒径识别占比中,A1~A10区0~2 m颗粒占比都在52%~69%,表明在PCAS颗粒识别系统中,小粒径颗粒识别效率高,各区占比较接近。
2.3 PCAS 优劣及可行性讨论
根据PCAS 在阈值为170、孔喉封闭半径为3、最小孔隙面积为30 三个参数下取得的各区粒径分布结果,结合人工统计数据,作各区粒径块数对比柱状图(图10)。结合图8、图9可得如下结果:
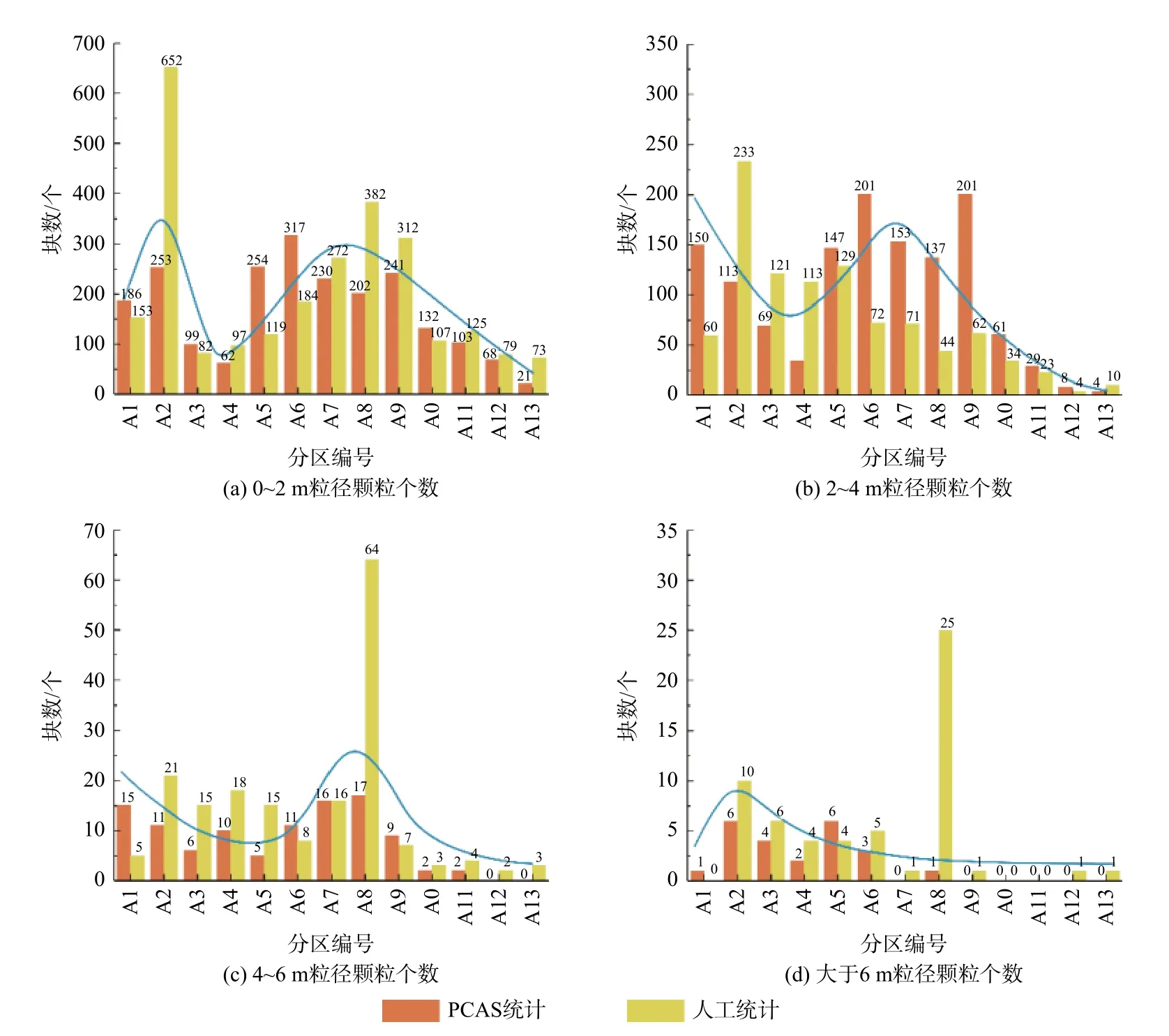
图10 PCAS 统计方法在T/r/S0=170/3/30时与人工统计各区颗粒块数对比图Fig.10 Comparison chart of the PCAS statistical method at T/r/S0=170/3/30 and artificial statistics
2.3.1 优势
(1) 高效性:PCAS 统计的细颗粒数量相比人工统计的多,但颗粒数量变化趋势基本一致,各区数量变化情况基本对应;0~2 m 粒径块数在A2、A4、A7 附近出现极值,2~4 m 粒径数量在A4、A7 附近出现极值。表明PCAS可以有效识别肉眼难以计数的细小颗粒,可以极大提高对小粒径颗粒(小于4 m)的识别效率,相比人工细小颗粒统计更高效。
(2) 准确性:当颗粒粒径大于4 m时,人工统计与PCAS 统计结果基本吻合(A8区异常)。人工对大颗粒的识别相比小颗粒准确性较高,这也证实了PCAS对堆积体识别的准确性,人工可以识别的,PCAS 也能自动准确识别。
(3) 规律性:从各区颗粒数量变化趋势可以看出,PCAS 统计颗粒数量变化呈相当好的规律,曲线圆润平滑,“波峰波谷”的数量极值与贵州纳雍等碎屑流崩塌实际情况对应较好[17-18],且符合碎屑流堆积体的一般规律[19]。而人工统计由于肉眼的局限性,在颗粒数量、颗粒大小上总会存在判断失误,与实际情况会有一定的差异。
(4)可操作性:PCAS颗粒识别系统操作简单,只需设定阈值(T)、孔喉封闭半径(r)、最小孔隙面积
(S0)三个参数,即可得到堆积体颗粒分布情况,可节省大量人力物力。
2.3.2 劣势
PCAS 劣势主要体现在三个参数自身的特性上,分析如下:
(1)A2、A8区颗粒数量出现奇点;图10(a)、(b)中,A2区人工统计粒径小于4 m颗粒数量比PCAS 计数高,主要是因为当颗粒小于PCAS 设置的最小孔隙面积时,就被自动删除,导致A2区粒径小于4 m的颗粒数量较低;图10(c)、(d)中,A8区人工统计粒径4 m以上颗粒数量较高,主要是因为PCAS 设置的孔喉封闭半径过大,许多形状不规则的大颗粒被错误分割成多个小颗粒,导致大颗粒数量变少,并且这些误分割成的小颗粒一部分大于最小孔隙面积,被识别成单个颗粒,导致A8区2~4 m 粒径颗粒数量较人工统计的多。
(2)PCAS 图像二值化,是根据图像中孔隙与颗粒的灰度值不同加以区分的,主要取决于所得堆积体图像。如果堆积体图像的分辨率、对比度、饱和度以及拍摄角度等不同时,选取的阈值可能会有差异,图像二值化结果也可能不同。
2.3.3 可行性
(1) 综合图8~10,当PCAS颗粒识别系统中采用不同的参数取值时,对分析崩塌碎屑流颗粒分布情况会有一定的影响。当所得图像与本文纳雍崩塌图像相似,阈值170、孔喉封闭半径3、最小孔隙面积30为最优参数选择,各区不同粒径数量与人工统计所得结果基本对应,粒径累计曲线与各区域不同粒径等级所占比例最接近实际情况;反之,可根据本文所介绍的PCAS 识别方法、步骤以及参数选取的判定依据,依据具体情况以“170、3、30”为基准进行合理的参数调整。
(2) PCAS颗粒识别系统已在贵州纳雍崩塌[10]和金沙江白格滑坡[11]中得到应用,并且效果显著。得到滑坡堆积体图像后,只需设定三个参数,即可对堆积体进行颗粒识别分析,操作简单,并且PCAS 具有手动编辑的功能,可以通过界面的“Edit binary image”功能,根据实际情况进行颗粒的调整。在新技术不断发展的今天,PCAS 不失为崩塌碎屑流粒径研究的一个高效、可行的途径,具有应用价值。
3 结论
(1)PCAS 能自动准确地识别碎屑流堆积物颗粒与孔隙,具有高效、准确、可操作性强等特点,可用于堆积物颗粒数字图像的识别、量化、分析;确定三个关键参数:阈值(T)、孔喉封闭半径(r)、最小孔隙面积(S0)的合适取值后,即可得出粒径分布情况,节省大量人力物力。
(2)针对颗粒粒径较大、二值化后孔隙与颗粒区分不明显、噪点较多的图像,采用较大的r/S0值更能反应颗粒分布宏观情况;反之,宜适当减小r/S0进行分析。当所得图像与本文纳雍崩塌图像相似,阈值170、孔喉封闭半径3、最小孔隙面积30为最优的参数选择,可得到有效的碎屑流颗粒分布情况;反之,可以“170、3、30”为基准进行合理的参数调整。
(3)PCAS 具有较高的可行性,所得贵州纳雍崩塌堆积物粒径识别和统计结果与实测值接近,粒径占比、分布规律基本吻合,即堆积体小粒径占比较多,0~2 m颗粒粒径各区占比都在50%以上,且运动距离越远小粒径比例越大,各区“波峰波谷”变化趋势基本对应。
