基于单片机系统的电机转速测量电路设计
2021-01-21杨扬
杨扬
(徐州工程机械技师学院,江苏 徐州221000)
1 转速测量方法
本电路设计转速测量是用增量式编码器结合单片机,采用M/T 法,完成测速工作并显示。增量式编码器与电机相连,输出信号接入本设计电路,即可实现转速测量及显示。
1.1 增量式轴编码器
光电轴角编码器,又称轴编码器或光电角位置传感器,是通过两个光敏接收管来转化角度码盘的时序和相位关系,并与单片机、计算机等控制器及显示装置相连接,实现数字测量、数字控制与数字显示。增量式编码器转轴旋转时,有相应的脉冲输出,轴编码器主要分为增量式、绝对式与混合式3 种,其中增量式轴编码器主要用于测量转子速度, 绝对式轴编码器主要用于测量转子的空间位置, 混合式轴编码器是增量式轴编码器与绝对式轴编码器的组合后端加入处理芯片之后,3 种轴编码器都具有测量转子速度与空间位置的功能。增量式轴编码器的结构如图1。
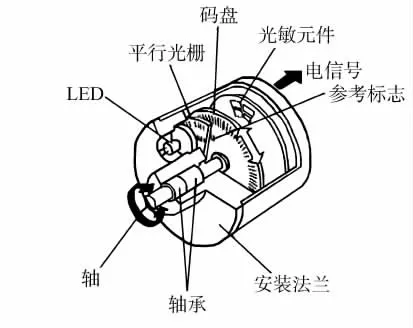
图1 增量式轴码器的结构
1.2 M/T法测转速
常用的采用旋转编码器的数字测速方法有三种:M法、T 法、M/T法。检测TC时间内旋转编码器输出的脉冲个数M1,又检测同一时间间隔的高频时钟脉冲个数M2,用来计算转速的方法,称作M/T法测速。高频脉冲的频率为f0,则准确的测速时间为Tt=M2/f0,电机的转速为:
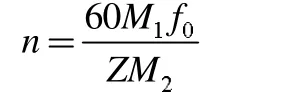
采用M/T法测速时,应保证高频时钟脉冲计数器与旋转编码器计数器同时开启与关闭,以减少误差。只有捕捉到编码器脉冲前沿时,两个计数器才同时开启与停止计数。
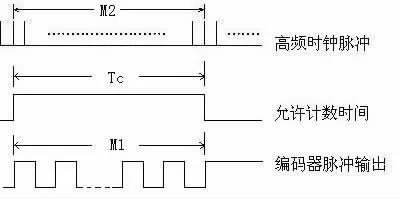
图2 M/T 法测速
2 硬件电路设计
单片机测量转速基本原理框图如图3 所示,本模块的设计思路是:引入编码器信号,对编码器信号进行简单的整形后,送入光耦将信号隔离,经光耦隔离后信号送入CPLD 进行预处理(辨向、倍频),然后送入单片机计算转速,送入LED 数码管显示。测速模块由整形电路、cpld、单片机、LED显示电路组成。
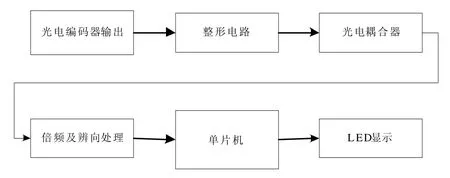
图3 硬件电路设计框图
2.1 传感器部分
主要分为两个部分,第一部分是光电编码器,将电机的转速信号转换为脉冲信号。第二部分是光电耦合器,将编码器输出信号和单片机计数电路两部分隔离,以减少干扰。光电编码器信号由JP1接入,本测速模块可应用两种型号编码器(5V 或12V),由开关S2、S3 控制,编码器信号经差分信号接收器AM26C32 后,由74LS14芯片将转速方波信号整形,送入光耦。光耦的结构相当于把发光二极管和光敏(三极)管封装在一起。发光二极管把输入的电信号转换为光信号传给光敏管转换为电信号输出,由于没有直接的电气连接,这样既耦合传输了信号,又有隔离作用,提高抗干扰能力。
2.2 CPLD部分
CPLD主要用于倍频以及辨向处理,一般编码器输出A、B两路信号,倍频处理可以利用光栅潜在的精度,使转速测量更为准确。一般的编码器,厂家给出的A、B 两相互差90 度的方波脉冲,是用4 个光电元件相当于等间距安放在一个栅距的距离上产生的脉冲信号,如果不经倍频处理将浪费光栅尺的精度,利用CPLD 可以将A、B两路信号进行2 倍频或4 倍频处理。
2.3 单片机部分
单片机用于计数,转速计算,本模块采用的是C8051F020 单片机,单片机内部有可编程计数器阵列(PCA0),带有捕捉功能。单片机采用新华龙公司的C8051F020,该单片机的主要功能已在上文论述,单片机外接22.1184MHZ 晶阵,转速脉冲及方向信号输入单片机后,由单片机进行转速计算,输出转速及转向信号。单片机的P4、P5、P6、P7 口用于接数码管进行转速显示,S1 用于给单片机复位,复位电路的基本功能是:系统上电时提供复位信号,直至系统电源稳定后,撤销复位信号。本模块采用的RC复位电路可以实现上述基本功能。单片机为低电平复位。
2.4 显示部分
转速计算完成后,通过数码管显示电机转速,由两个二极管显示电机转向(正转或者反转)。电源供电情况由LED1 和LED2 显示,二极管LED1 是芯片电源VCC(5.5V)指示灯,LED2 是单片机电源3.3V指示灯。电机转向由D1 和D2 显示,D1 是正转指示灯,D2 是反转指示灯。用D3 的闪烁速度间接指示电机转速,D4 用于单片机编程时测试用。电机转速由七段数码管显示,选用共阴极LED数码管。由于单片机剩余管脚较多,可以采用静态显示,单片机管脚输出电压不足以驱动数码管显示,故采用4 片74LS245 芯片驱动。
2.5 电源部分
用于给所硬件电路用到的5V 芯片,3.3V 单片机,LED 等器件供电,本部分包含电压隔离措施。5.5V直流电源由CON2 口引入,由于本模块选用的C8051F020 芯片的电源电压为3.3V,而其它芯片电源电压为5V,故需一个电压转换芯片。TPS333QD 用于将5V电源转换为3.3V,给单片机部分供电,为降低编码器输入信号部分对电机转速信号处理部分的干扰,需要进行电压隔离,DC/DC变换器将转速处理部分5V电源与编码器输出部分5V电源隔离。电容C1-C6,C7-C11,C22-C25 用于各部分信号的滤波处理。
3 软件设计
系统要正常工作,需要软件的配合,软件除了完成对系统硬件的初始化,还要对硬件电路进行实时控制,对数据进行输入输出操作和数值分析,并根据分析结果做出相应的处理。以下给出单片机的软件流程。单片机的软件部分主要完成计数工作,转速计算及显示。软件设计分为主程序和中断程序两个部分,主程序用设置单片机的工作状态,初始化各种参数,显示电机的转速值及转向。中断程序为PCA0 脉冲触发中断,用于计M1,M2;以及定时器中断,用于每个测速周期提供计数中止信号。中断程序中还包括了电机转速的计算。
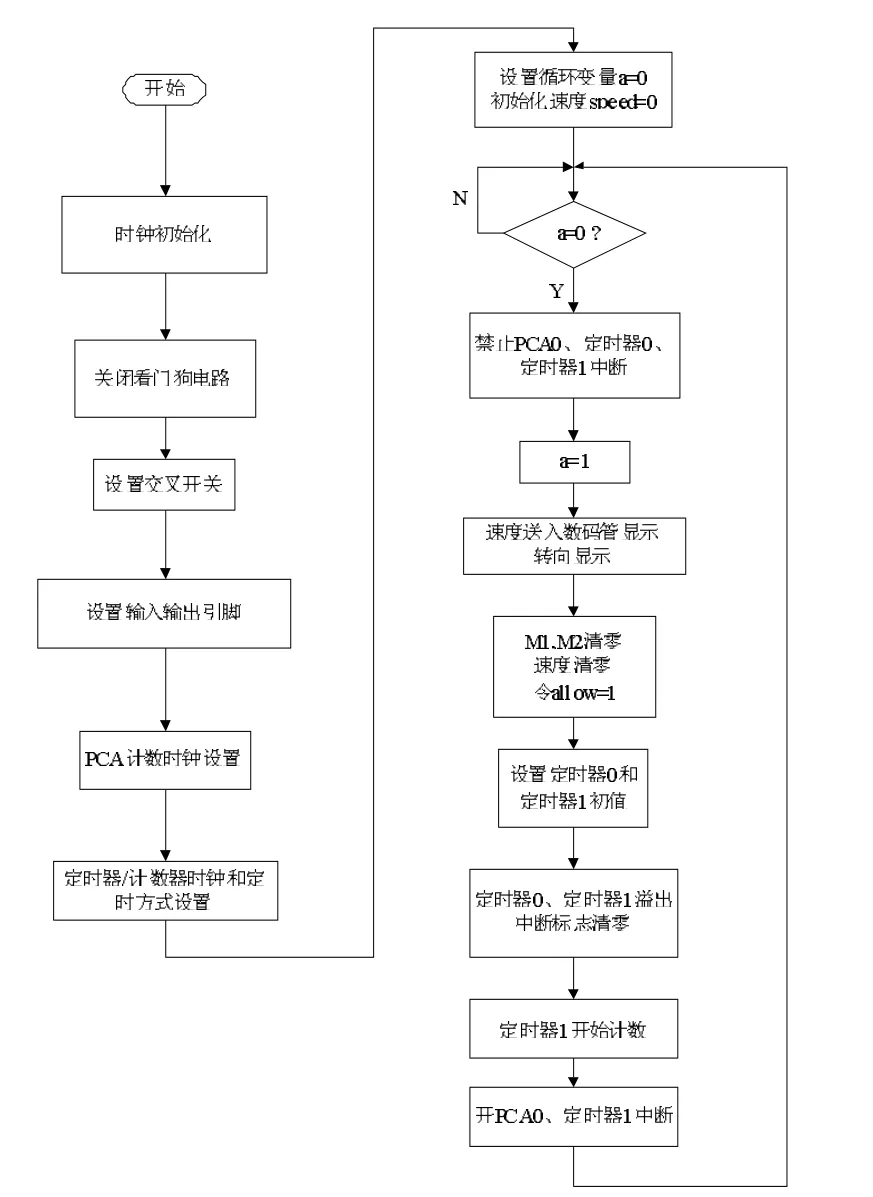
图4 主程序流程
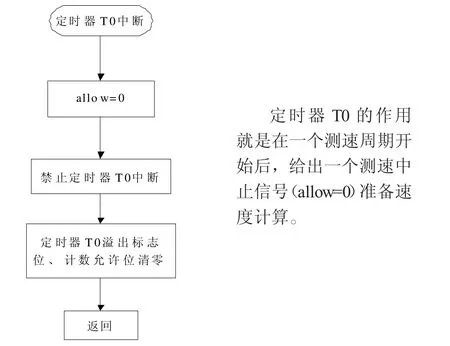
图5 定时器T0 中断服务程序流程
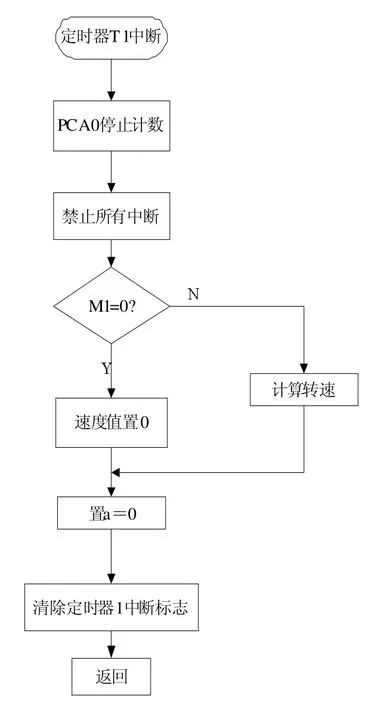
图6 定时器T1 中断服务程序流程
在电机处于超低转速状态,或者电机出于停机过程中时,T0 定时时间到而PCA0 在很长时间内无法捕捉到上升沿,在电机停转时甚至没有码盘脉冲产生,也就没有上升沿,为使测速能继续进行,添加定时器T1,T1 中断可解决上述问题。
当T0 计时时间到,T0中断响应后,PCA0 未捕捉到下一个码盘脉冲上升沿,无法产生PCA0 中断,直到T1 时间到,响应T1中断,完成本次测速周期。
4 设计小结
本模块依据M/T 法进行设计,设计分为硬件和软件两个部分,软件与硬件的结合,可完成电机转速的测量工作。
电路部分考虑到的设计因素有:光电编码器的信号接入方式,电路整形及防干扰措施,电源供电及电压变换,倍频及辨向,单片机的应用,显示电路。