赤道式望远镜的变结构PI控制
2021-01-21王雪峰王鸣浩杨晓霞李玉霞吴庆林
王雪峰,张 斌,王鸣浩,杨晓霞,李玉霞,吴庆林
(1.中国科学院 长春光学精密机械与物理研究所,长春 130033;2.中国科学院大学,北京 100049)
根据跟踪架结构形式的不同,光电望远镜可以分为赤道式、地平式、水平式等[1]。赤道式望远镜的最大优点是在视场上观测目标位置没有相对转动,同时在观测条件最好的天顶位置没有盲区。由于具有上述优点,赤道式跟踪架是光电望远镜设计中常采用的一种结构形式。然而,赤道式望远镜的缺点是赤经轴的摩擦力大且不均匀,这是因为赤经轴在镜筒和叉臂的重力作用下产生了变形,且望远镜底座与赤经轴之间可能产生温差膨胀变形。上述两种变形都会导致赤经轴摩擦力变大[2]。
赤道式望远镜是一种精密观测设备,对伺服系统的定位精度、响应速度和动态跟踪精度等指标的要求非常高,但赤经轴上较大且不均匀的摩擦力导致上述性能指标很难实现。主要体现在动态跟踪误差大,速度换向时出现位置误差尖峰,低速运行和精确定位时产生滞滑、爬行及极限环等有害特性[3-6]。要提高伺服系统的性能,必须减小或消除摩擦力的影响,为此,提出了多种摩擦力补偿方法。如神经网络补偿、自适应补偿、模糊补偿等,但这些算法较复杂,并不适合工程应用。
光电望远镜伺服系统通常采用由速度环和位置环组成的双闭环控制结构。速度环为内环,位置环为外环,控制算法主要以PID为主。PID控制是通用的控制方法,其结构简单,易于程序实现,同时具有很好的鲁棒性,可靠性高,在运动控制系统有非常广泛的应用。但是,PID控制器的参数在控制过程中是不变的,这严重制约了控制性能。为此,研究人员提出了多种新型PID控制器[7-25]。按照控制理论,PID控制的微分环节对外界扰动非常敏感,因而对于光电望远镜而言,采用省去微分环节的PI控制器更加合适[26]。
针对赤道式望远镜存在的问题,结合PI控制器和变结构思想,利用双闭环控制结构的特点,本文中设计了一种变结构PI控制器(VSPI),构造了以速度误差为自变量的比例增益函数和以位置误差为自变量的积分增益函数,可根据误差的变化实时调整比例积分。VSPI控制器结构简单,参数调节方便,经过仿真分析和实验发现,VSPI控制器能够减小望远镜赤经轴摩擦力的影响,提高伺服系统的定位精度、响应速度和动态跟踪精度。
1 变结构PI控制器
1.1 经典PI控制器的特点
经典PI控制器的时域表达式为:
式中:u(t)是控制器的输出;e(t)为误差;Kp为比例增益;KI为积分增益。根据式(1),PI控制器的特点可总结为:① 误差e(t)和误差的积分∫e(t)dt是产生控制量u(t)的两个基本要素;② 控制量u(t)是e(t)和的线性组合,在控制过程中,比例增益Kp和积分增益KI保持不变。大量研究成果和实际应用结果表明,PI控制器的这种线性特性制约了控制性能[25]。
分析PI控制器的特点,可以发现比例作用Kp和积分作用KI在控制过程中的作用:①KP的作用是使控制器的输出和输入成正比关系,是有差调节,增大KP可以减小误差,也能够提高响应速度,但KP不能无限增大,否则会导致系统不稳定;②KI的作用是消除稳态误差,但会降低快速性和稳定性,在大误差阶段,积分作用很容易使系统达到积分饱和,导致出现很大的超调量,调节时间也会变长[12]。
综合上述分析,考虑将PI控制器的参数改为实时性和非线性,以获得更好的控制性能。
1.2 位置、速度双闭环控制结构分析
赤道式望远镜伺服系统采用位置、速度双闭环的控制结构,如图1所示。位置回路为外环,速度回路为内环,位置回路的输出是速度回路的输入。
速度回路的作用是克服摩擦力矩等非线性干扰。速度回路的性能直接影响伺服系统性能。如果速度回路能够快速、稳定地跟踪位置回路的输出,则伺服系统能够达到很高的跟踪精度。
为了提高速度回路的性能,改进经典PI控制器,通过实时调整比例和积分作用来提高控制器的性能。比例作用的调整依据是速度误差的变化,当速度误差较大时,增大比例增益以加快响应速度、缩短调节时间,而随着速度误差的减小则逐渐减小比例增益。积分的作用是减小稳态误差,但是增强积分作用容易导致系统不稳定,因此需要限制积分作用的强度。对于双闭环伺服系统,调整速度回路积分作用时需要考虑位置误差的变化。速度回路要跟踪位置输出,必须克服摩擦力矩等干扰因素,而由文献[12]可知,加强速度回路的积分作用能够减小摩擦力矩的影响。依据控制原理,伺服系统对位置输入的响应过程可分为动态过程和稳态过程。在动态过程中,位置误差大,速度也较大,摩擦力对速度回路的影响相对小一些,速度回路需要快速响应以尽快减小位置误差,此时速度控制应以比例控制为主,而积分作用不宜太强,这样既能快速响应,又能避免控制器饱和,可获得良好的动态性能。当位置响应进入稳态过程后,由于受到摩擦力矩的影响,速度回路对位置回路输出信号的跟踪能力减弱,速度回路的响应变慢,这会使稳态位置误差变大,并可能导致极限环振荡。此时,应加强速度回路的积分作用,减小摩擦力矩的干扰,从而提高位置跟踪精度。
1.3 基于误差函数的变结构PI控制器
设计一种变结构PI控制器(VSPI)并用于赤道式望远镜的速度回路,VSPI的结构如图2所示。
VSPI的比例增益KP是速度误差的函数,而积分增益KI是位置误差ep的函数。ep、ev是伺服系统的实时速度误差和位置误差,KP、KI的变化规则如式(2)(3)所示。
式中:KP、KP0、KP1、c0、KI、KI0、c1、KI1、ep0均为正实常数。
比例增益KP的调整依据是ev的变化。当ev=0时,KP取最小值为KP0;当ev→ ±∞时,KP取最大值为KP0+KP1。KP的变化趋势与误差的变化趋势相同。调整c0的大小可调整KP变化的速率,图3为KP随ev的变化曲线。变化的比例增益既能提高响应速度、减小超调量,也能保证稳定性。
积分增益KI的调整依据是ep的变化,通过函数f(ep)动态地调整KI。式(2)为f(ep)的变化规则,图4所示为f(ep)的变化曲线。ep0用于界定动态过程和稳态过程。当时,伺服系统的响应处于动态过程,f(ep)的值恒为1,KI取最小值KI0,积分作用保持不变;当时,响应进入稳态过程,f(ep)>1,通过f(ep)对KI进行动态放大,从而动态地加强积分作用,减小摩擦力矩的影响,进而提高速度回路对位置回路输出的跟踪能力。f(ep)的值随着ep的减小而逐渐变大,当ep=0时f(ep)取最大值,此时积分作用最强。
2 仿真研究
为了验证VSPI算法的有效性,仿真分析等效正弦跟踪过程。仿真时采用某赤道式望远镜赤经轴的实测模型作为控制对象,模型的传递函数为:
仿真模型的结构如图5所示,在位置回路采用双超前-滞后校正,速度回路分别采用PI、VSPI控制器。
位置回路控制器传递函数为
PI控制器的参数根据文献[27]确定,望远镜模型的机械时间常数Tm=1.12 s,电气时间常数Te=0.006 s,增益K=0.85。根据内模PID原理,比例增益KP=Tm/Kλ,积分增益KI=1/Kλ,其中λ值越小越有利于动态性能,λ值越大则越有利于增强鲁棒性。取 λ=0.05附近,再对KP、KI适当调整,最后得到KP=28、KI=20.21。
VSPI控制器的参数与PI控制器的参数有一定关联,VSPI参数的确定原则为:KP0值约为KP的0.5~0.6倍,KP0与KP1二者之和同KP相当;KI0约为KI的0.5~0.6倍,KI1取值范围是20~40,c0、c1的取值范围是15~30,ep0、ev0的取值要尽量小一些。根据以上原则,最后选取KP0=15.02,KP1=12,c0=18,KI0=10.43,KI1=30,c1=25,ep0=0.02°,ev0=0.1(°)/s。
图6、7所示为仿真得到的等效正弦跟踪位置误差曲线,图7是图6的局部放大图。图6、7中位置误差曲线的尖峰产生在速度换向阶段,此时摩擦力对动态跟踪精度的影响最大。表1表示PI、VSPI仿真结果,仿真结果表明:采用VSPI算法的误差明显小于采用PI算法的误差,VSPI算法能够提高伺服系统的动态跟踪精度。
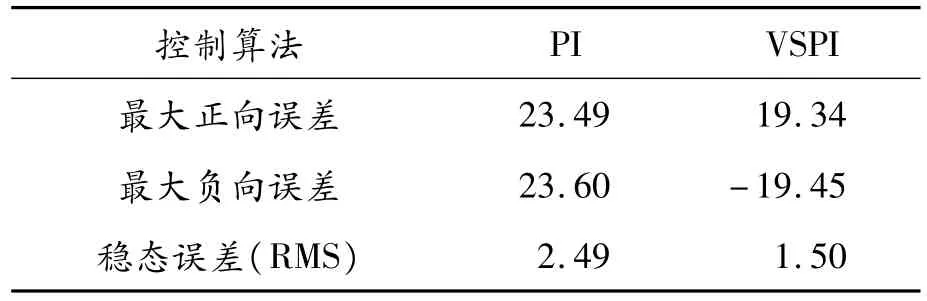
表1 两种控制算法的仿真结果
3 实验与结果
为了进一步验证VSPI算法性能,在某赤道式望远镜赤经轴上进行实验,该赤经轴由直流力矩电机驱动。赤道式望远镜结构如图8所示,转动惯量约为1 050 kg·m2,控制系统选用文献[28]所设计的通用集成伺服控制系统。如图9所示,该伺服控制器系统由1个配电模块、2个大功率开关电源、1个双轴电机驱动器、1个伺服控制器组成。配电模块的作用是为开关电源、双轴功率驱动器、伺服控制器供电。2个开关电源作为双轴电机驱动器的功率电源,每个开关电源的功率可达2 800 W。双轴功率驱动器可独立驱动2台直流力矩电机。伺服控制器由PC/104 CPU模块(SCM/LX-3072,主频500 MHz)和接口电路板组成,伺服控制器的功能是接收编码器数据和主控计算机的控制命令,进行位置闭环、速度闭环校正运算,输出PWM给电机驱动器,最终实现对电机的精确控制。赤经轴的位置反馈由圆光栅提供,圆光栅的角分辨率为0.032 4″,速度反馈由位置反馈数据差分获得,系统的闭环校正频率为500 Hz。位置环采用超前-滞后校正,速度环分别采用PI和VSPI算法,PI、VSPI算法的参数与仿真设置相同。
3.1 位置定位实验
图10、11是采用PI算法得到的1°位置阶跃响应误差曲线,图12、13是采用VSPI算法得到的1°位置阶跃响应误差曲线。表2是1°位置阶跃实验数据。计算表2中的稳态误差(RMS)时,选取的数据源是进入稳态后25 s内的稳态误差数据。从实验结果可以看出:采用PI算法时,过渡时间为0.68 s,位置阶跃稳态阶段存在稳态极限环振荡,稳态误差为0.62″,并且经过60 s仍无法达到稳定状态;而采用VSPI算法后,过渡时间为0.59 s,消除了极限环,系统可以快速稳定,稳态误差仅为0.13″。
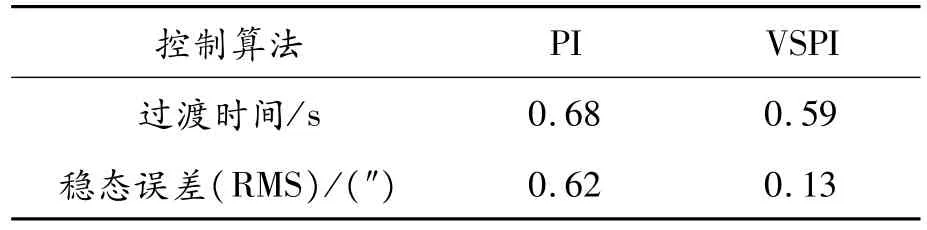
表2 1°位置阶跃实验结果
3.2 等效正弦响应实验
为了测试赤经轴的动态跟踪精度,通过等效正弦信号r(t)=64sin(0.125t)°对系统进行测试。该信号的最大等效速度为8(°)/s,最大等效加速度为1(°)/s2。图14、15分别给出了采用PI、VSPI算法时的等效正弦响应曲线,表3是等效正弦实验数据。
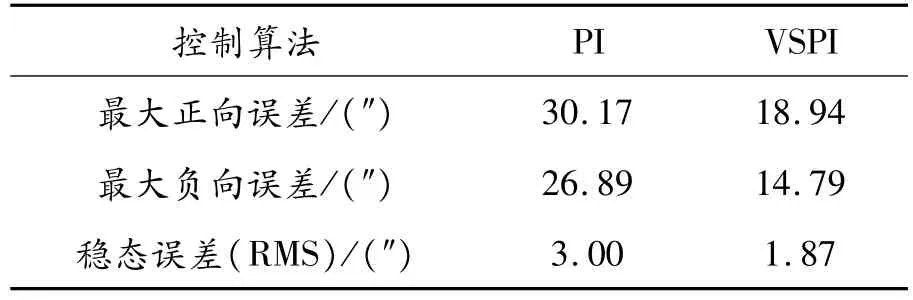
表3 等效正弦实验结果
等效正弦实验数据表明:采用VSPI算法后,最大正向误差减小了37.2%,最大负向误差减小了44.9%,稳态误差减小了37.7%,VSPI算法能够显著提高动态跟踪精度。
4 结论
针对赤道式望远镜伺服系统跟踪精度高、定位响应快的要求,结合经典PI控制器原理和变结构思想,提出了VSPI控制器。基于双闭环控制结构将经典PI、VSPI两种算法分别运用在速度回路进行仿真,最后在某赤道式望远镜赤经轴上进行位置定位和等效正弦跟踪实验。实验数据表明:采用VSPI算法后,赤道式望远镜的1°位置阶跃过渡时间由0.68 s缩短至0.59 s,位置阶跃稳态误差由0.62″减小到0.13″,等效正弦跟踪误差由3″减小到1.87″,各项控制指标满足赤道式望远镜的要求。VSPI算法可成功应用到赤道式望远镜伺服系统中。