基于无人机与激光测距技术的农田地形测绘
2021-01-19杜蒙蒙刘颖超姬江涛
杜蒙蒙,刘颖超,姬江涛,金 鑫,周 浩,刘 可
(1.河南科技大学农业装备工程学院,洛阳 471003;2.机械装备先进制造河南省协同创新中心,洛阳 471003;3.上海交通大学机械与动力工程学院,上海 200240)
0 引 言
土地平整是建设高标准农田的重要技术措施之一,可显著提高农田灌溉效率,改善田间土壤盐分与养分的空间分布状况,减少病虫草害的发生,增加作物产量[1-3]。而获取高精度的农田地形数据,并依此基础设定适当的平整地基准高度与作业路径,是提高平整地作业精度、降低平地铲的超载率与空载率、提高平整地作业效率的重要技术手段[4-6]。目前,获取农田地形数据主要有 2种方法:一是接触式测绘,即利用水准仪、全站仪或高精度 GPS(Global Positioning System,全球定位系统)等工程测绘设备[7],逐点测量数个至数十个地面控制点的高程数据,经空间插值生成农田地形图[8-11]。二是遥感测绘,即采用航空摄影、激光雷达成像等遥感技术获取相应的数字地形模型(DTM,Digital Terrain Model)或数字表面模型(DSM,Digital Surface Model)[12-14]。
接触式地形测绘直接或间接与地表接触,可以精准获取测量点的标高数据,并通过三角网平差处理控制测量误差[15],但其地形图精度受测量点数量与空间分布状况的影响,测绘效率低、地理信息数据稀疏,多应用于工程施工与河道监测等小尺度测绘作业。例如,Ahmed使用全站仪的测量结果作为参考数据,在都市环境下对实时动态差分(RTK,Real Time Kinematic)GPS设备的三维定位数据进行了分析与精度评价,试验结果表明RTK-GPS数据在水平方向与竖直方向上分别具有2.14与2.79 cm的定位精度,满足一般地形测绘精度要求[16]。基于航空摄影或激光雷达成像技术的遥感地形测绘具有覆盖面积大、作业效率高等优点,但其地形图的整体精度偏低,而且作业成本昂贵,多适用于大面积测绘且对高程精度要求较低的作业场合。例如,Sugiura等[17]利用直升机作为测绘平台,搭载RTK-GPS设备、电子陀螺仪与激光雷达进行牧场的地形测绘作业,获取了最大高程误差为9 cm的DTM地形图。Tahar等[18]在固定翼无人机平台上搭载商用数码相机获取航拍图像,测量若干地面控制点的三维坐标之后完成航空图像的拼接与地理配准,并生成高程精度约为2 m的DTM地形图。尹金宽等[19]设计了低空无人机数字摄影测量系统,基于航空摄影测量原理研发航拍影像的处理算法,获取标高误差约20 cm的DTM数据。Yue等[20]利用无人机搭载高光谱相机获取麦田的高光谱图像与单色图像,通过图像拼接软件输出DSM。朱海斌等[21]利用无人机倾斜摄影测量技术对露天矿区进行测绘,根据多视图三维重建技术对航拍图像进行了三维模型重建,进而获取10 cm高程误差的DTM数据。综上所述,接触式地形测绘方法的作业效率低、覆盖范围小;而航空摄影地形测绘方法的高程精度差,而且对多幅图像中的同名地物识别度有较高要求,不适用于地物单一的农田地形环境。
为了满足精准平整地作业对厘米级高程精度的农田地形图需求,本文以测绘学、无人机遥感、激光测距(LiDAR,Light Detecting and Ranging)、后处理动态差分GPS技术(PPK-GPS,Post-Processing Kinematic GPS)为基础,基于六旋翼无人机平台,设计一种基于激光测距技术的遥感式农田地形测绘系统。该系统融合轻量化PPK-GPS模块的定位数据、无人机飞行控制器的姿态数据,以及激光测距模块的距离数据,实现农田地形数据的高效采集与处理,可为生成高精度的农田数字地形图提供数据支持。
1 材料与方法
本研究采用北方天途 M6E六旋翼无人机作为负载平台,激光测距模块固定安装在无人机底部,2个微型 GPS模块分别用作移动站及基站获取PPK-GPS定位数据,其中GPS基站静置在试验地块外侧,GPS移动站安装在无人机顶部。试验场地为位于河南省开封市的一处多年耕种熟地,前茬作物为玉米,地块面积约为1.2 hm2。所用设备和装置的具体参数如表1所示。
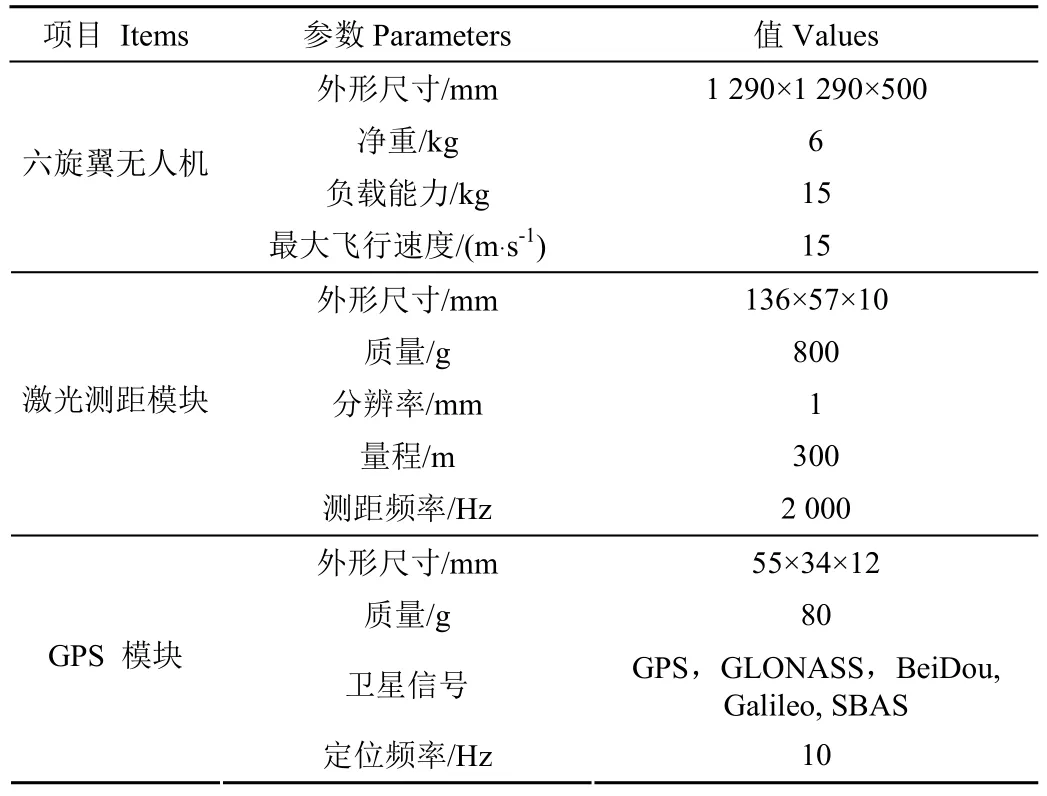
表1 试验设备与参数Table 1 Experiment equipment and parameters
1.1 试验方法
首先,根据试验地块的尺寸、形状等特点,规划无人机的飞行路径。将GPS移动站及激光测距模块分别安装在无人机机体的顶端与底部,GPS 模块上电后将定位数据(10 Hz)存储在主板内存上,激光测距模块经串口通信将原始测距序列(测距频率为2 000 Hz)存储在机载电脑上。通过地面控制站将飞行路径导入无人机的飞行控制器,无人机按预定路径完成飞行任务。在无人机返回地面后分别获取激光测距模块的原始测距序列、GPS移动站数据以及静置在地面的GPS基站数据(10 Hz),同时从无人机的飞行控制器中提取飞行过程中的姿态数据(测量频率为 10 Hz)。以 GPS基站数据为参照,利用后处理动态差分方法修正GPS移动站数据,获取无人机地形测绘系统的PPK-GPS定位数据 (xGi,yGi,hGi),其中xGi,yGi,hGi分别为无人机地形测绘系统的经度、维度和海拔高度。使用步长为 200的均值滤波器处理原始激光测距序列,获取10 Hz的激光测距序列dLi,以提高激光测距的精度,同时完成激光测距序列与飞行姿态数据及PPK-GPS定位数据的频率同步。从无人机飞行控制器中提取俯仰角与横滚角姿态数据,根据空间几何关系校正激光测距序列dLi,消除无人机飞行过程中姿态变化对激光测距精度的影响,获取校正后的激光测距序列dCLi。从PPK-GPS定位数据 (xGi,yGi,hGi)中提取hGi分量,减去GPS移动站的天线模块与激光测距模块的安装高度差hfix以及校正后的激光测距序列dCLi,获取地面测量点的海拔高度序列hi。使用hi替代PPK-GPS定位数据 (xGi,yGi,hGi)中的hGi分量,获取地面测量点的三维坐标数据(xGi,yGi,hi)。最后,利用手持PPK-GPS设备测量若干个与无人机航迹重合的地面测量点定位数据,检验无人机地形测绘系统的测绘精度。
1.2 数据获取与处理
试验区域位于河南省开封市(图1),地块尺寸约为150 m×80 m,前茬作物为玉米,休耕状态,试验前清除地块内杂草,地面无显著附着物。试验于2019年9月15日进行,无人机飞行速度约为5 m/s,飞行高度约30 m,无人机航迹的旁向轨迹间隔约为30 m。剔除起飞、地头转弯、以及降落过程中的冗余数据,单次无人机飞行(3次往复)测绘作业共获取 1 417组有效数据,地面测量点的空间分辨率约为30 m×0.5 m。使用手持PPK-GPS设备获取22组检验点数据,并与无人机飞行航迹交点处的三维定位坐标值比较,检验无人机地形测绘系统的精度。采用WGS84大地坐标系,并使用UTM投影系(Zone_50N)获取经度与纬度坐标。
1.2.1 PPK-GPS数据获取与处理
RTK(Real-Time Kinematic)- GPS设备内嵌实时通讯模块,体积及重量过大,多应用于车辆导航或接触式测绘作业,不适合搭载在多旋翼无人机上进行测绘作业。另外,使用GPS模块进行地形测绘区别于GPS导航,前者对GPS基站与移动站之间的实时通讯不作要求,可在测绘作业结束后采用后处理的方式对GPS移动站数据进行动态修正。本文采用如图2所示的2个微型GPS模块(具体参数如表1所述),其中一个GPS模块作为基站静置在试验地块外侧, 另一个GPS模块作为移动站安装在无人机顶部。

图1 试验区域及地面测量点与精度检验点的空间分布Fig.1 Study area and spatial distribution of ground measuring points and accuracy checking points

图2 微型GPS模块Fig.2 Micro GPS module
首先,使用算术平均法计算PPK-GPS数据处理算法的基准位置坐标 (xr,yr,hr),其中xr,yr,hr分别为基准位置坐标的经度、纬度与海拔高度。将 GPS基站模块静置30 min,测得18 000组有效定位数据。根据公式(1)~(3)计算得到基准位置坐标为(114.950 334 47E,34.763 683 31N,63.754 m)。

式中loni、lati、alti分别为GPS基站模块的有效经度、纬度与海拔高度序列。
使用基准位置坐标为参照,修正GPS移动站的定位数据序列。在RTKLIB开发环境下使用PPK开源算法处理GPS基站与移动站的载波相位数据,求解无人机地形测绘系统的PPK-GPS定位数据序列 (xGi,yGi,hGi)。剔除起飞、地头转弯和降落过程中的冗余数据,共获取1 417组有效定位数据,PPK-GPS定位数据的海拔高度如图3所示。

图3 PPK-GPS定位数据的海拔高度Fig.3 Altitudes of PPK-GPS positioning data
1.2.2 激光测距序列的获取与处理
激光测距模块固定安装在无人机底部,竖直指向地面,采用ToF(Time of Flight)测距模式,有效测量距离为100 m,测距分辨率为1 mm、测距频率为2 000 Hz。为了便于与无人机飞行姿态数据及PPK-GPS定位数据进行同步处理,同时提高其测距精度,采用一维均值滤波算法处理激光测距原始序列,得到10 Hz的激光测距序列dLi。以无人机起飞离地瞬间的 PPK-GPS定位数据的海拔高度及激光测距为参照,对PPK-GPS定位数据与激光测距值进行时序同步。
由于多旋翼无人机的结构特点及固有的空气动力学特性,在飞行过程中无人机的姿态不断变化并在飞行控制器的作用下实时进行调整,对激光测距精度造成不可忽视的影响。根据公式(4)及图4,使用飞行控制器的俯仰角与横滚角对激光测距序列进行修正。激光测距序列的高度修正结果如图5所示。

式中dCLi为校正后的激光测距值序列(m),dLi为校正前的激光测距值序列(m),iθ为无人机平台的实时俯仰角度值(rad),iφ为无人机平台的实时横滚角度值(rad)。

图4 无人机姿态数据校正激光测距序列原理Fig.4 Principle of correcting Light Detecting and Ranging(LiDAR)sequence with UAV attitude data
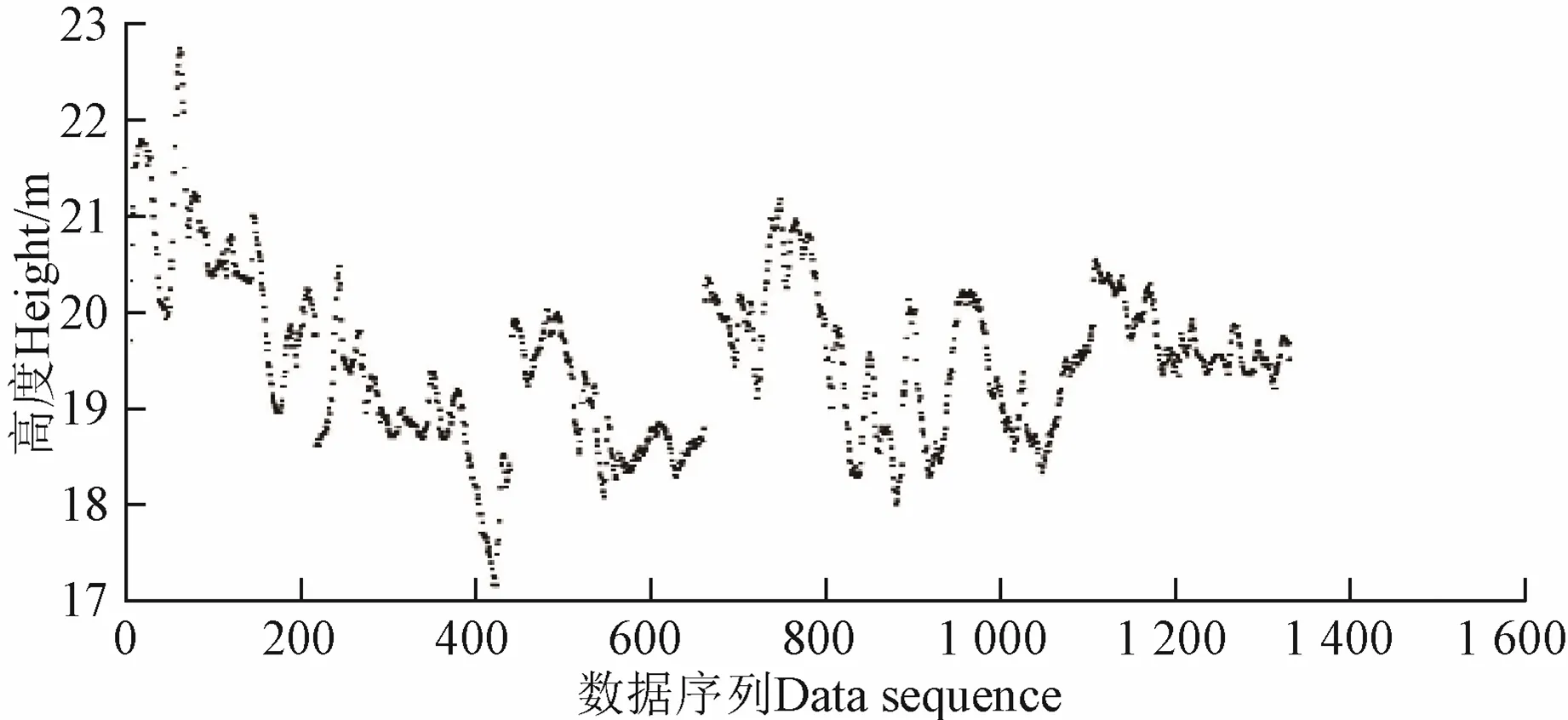
图5 校正后无人机系统与地面间的激光测距高度Fig.5 Corrected LiDAR altitude between UAV system and ground
最后,根据公式(5),计算地面测量点的海拔高度序列hi。用hi替代PPK-GPS定位数据序列 (xGi,yGi,hGi)中的hGi分量,获取地面测量点的三维坐标数据序列(xGi,yGi,hGi)。

式中hi,hGi,hfix,dCLi分别为地面测量点的海拔高度(m)、PPK-GPS定位数据的海拔高度(m)、GPS移动站天线与激光测距模块之间的安装高度差(0.66 m)和校正后的激光测距序列(m)。
2 结果与分析
2.1 PPK-GPS定位精度与激光测距精度
为了验证PPK-GPS系统的静态定位精度,将GPS移动站保持静置状态,连续提取10 min同时段内的GPS移动站与 GPS基站的有效定位数据,采用 1.2.1节所述的PPK算法,获取6 000组PPK-GPS定位数据,其海拔高度分量如图6所示。由图6可知,当GPS移动站保持静置状态时,PPK解算的海拔高度值在 64.350~64.380 m范围内浮动,PPK-GPS的海拔定位精度约为 0.03 m(3 cm),与目前接触式地形测绘中广泛应用的RTK-GPS定位精度相当。因此,本研究使用的PPK-GPS模块满足地形测绘的定位精度要求。与单点 GPS、差分 GPS或RTK-GPS的定位原理一致,其水平定位精度优于竖直定位精度,本文不做赘述。

图6 静置状态下GPS移动站PPK定位数据的海拔高度波动情况Fig.6 Altitude fluctuation of PPK positioning data of GPS mobile station in static state
同理,将激光测距仪水平静置,指向距离约为25 m处的墙面,静置10 min获取6 000组有效激光测距序列,如图7所示。静置状态下的激光测距序列在25.872~25.882 m之间浮动,测距精度约为 0.01 m(1 cm)。因此,本研究使用的激光测距模块具有稳定且精确的测距精度。

图7 静置状态下激光测距序列的波动情况Fig.7 Fluctuation of LiDAR sequence in static state
2.2 农田地形测绘精度
基于1 417组地面测量点的三维坐标数据,在地理信息系统软件ArcMap环境下采用Jenks自然断点分级法,生成试验地块的地面海拔高度示意图,如图8所示。从图中可看出,地面测量点的海拔高度在63.165~63.969 m之间(地形高差为0.804 m),平均海拔高度为63.497 m,标准差为0.148 m。此外,根据图8可知,试验地块的东南部分(右下方)大面积范围内具有均匀一致的地形趋势;而西南部分(左下方)大面积范围内具有较大的地形起伏。
采用手持PPK-GPS设备在试验区域内测得22组地面检验点的三维定位数据,检验无人机地形测绘系统的精度,检验点的三维空间坐标数据如表2所示。根据式(6)计算得到海拔高度的均方根误差RMSE=0.052 m,表明无人机地形测绘系统具有较高的地形测绘精度。

式中e测量点与e检验点分别表示无人机地形测绘系统获取的地面测量点的海拔高度以及使用手持PPK-GPS设备获取的检验点的海拔高度,m。
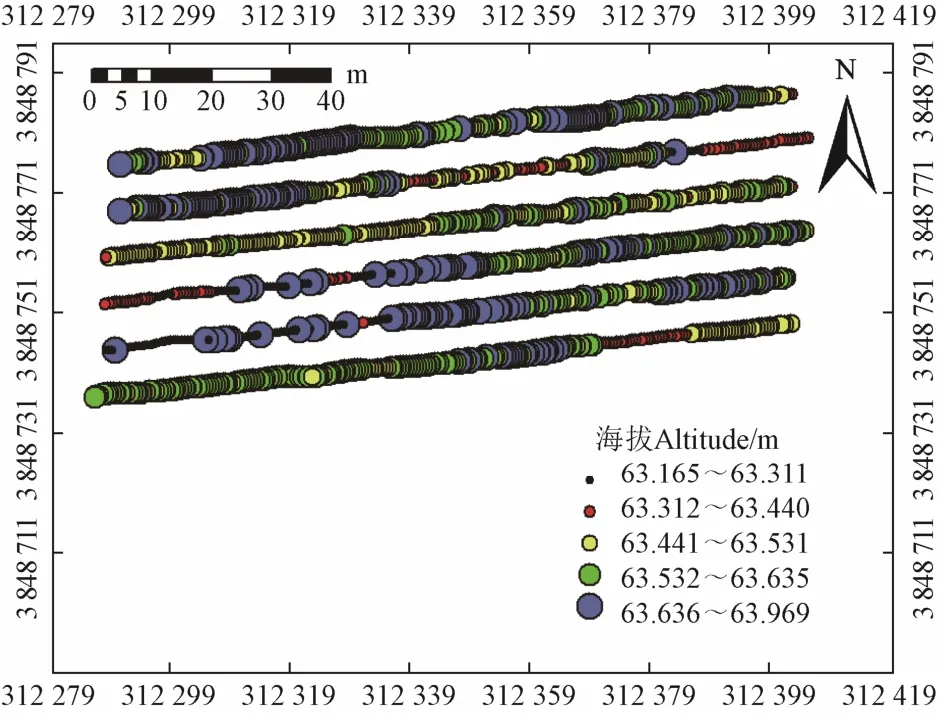
图8 无人机测绘系统获取的试验地块地形示意图Fig.8 Schematic diagram of topographic map of test plot obtained by UAV mapping system

表2 测量点、插值点及检验点的三维坐标值Table 2 3D coordinates of measuring points, interpolating points and checking points
2.3 空间插值精度
本研究中,地面测量点的空间分辨率约为30 m×0.5 m。所获得的1 417组地面测量点不能覆盖试验地块的全部区域。为了获取空白区域的地形数据,采用空间插值的方法将离散的地面测量点数据转化为连续的农田地形图[22]。克里金(Kriging)空间插值是典型的地质统计学算法,基于区域性变量与最小二乘算法,依据已知数据的协方差函数对随机过程进行空间预测与建模,广泛应用于描述气压、海拔高度等连续性变化的指标变量[23-24]。因此,本文采用克里金插值算法,基于无人机地形测绘系统的 1 417组地面测量点数据生成试验地块的空间插值地形图(图像空间分辨率为0.2 m×0.2 m)。基于Jenks自然断点分级法,将试验地块的克里金空间插值地形图划分为 3个等级,结果如图9所示,该试验地块的地面海拔高度在 63.198~63.797 m之间(地形高差为0.599 m),平均海拔63.498 m,标准差为0.107 m。通过空间插值地形图可知试验地块西部具有明显的南北两端地势较高而中间部分地势较低的特点,试验地块东部同样具有沿南北方向地势起伏较大的显著特点。在该试验地块内如果沿东西方向进行平整地作业,在北部地势较高的区域易出现平土铲过载、拖拉机机组滑转的状况,而在西南部分地势较低、明显呈东西方向长条形状的区域则易出现平土铲长时间空载的状况。因此,在该试验地块内部沿南北方向进行平整地作业具有更高的效率和较好的平整效果,该空间插值地形图为后期合理规划平整地作业路径提供参考。

图9 试验地块的克里金空间插值地形图Fig.9 Topographic map of experimental field generated by using Kriging interpolation method
根据手持PPK-GPS定位数据的经纬度信息,提取空间插值地形图中相应位置处的海拔高度,并根据公式(7)计算两者间的均方根误差RMSE插值= 0.087 m。将0.087 m的RMSE插值与空间插值地形图中0.599 m的地形高差以及0.107 m的海拔高度标准差相比较,可知该空间插值地形图具有较高精度。但是,RMSE插值略大于 RMSE,表明空间插值地形图的标高精度略低于无人机地形测绘系统的标高精度,可通过增加地面测量点数量、改善地面测量点的空间分布等措施,进一步提升空间插值地形图的标高精度。

式中e插值点与e检验点分别表示空间插值地形图中提取的海拔高度和相同点的手持PPK-GPS定位数据的海拔高度,m。
3 讨 论
精准平整地作业是一项多领域交叉的系统工程,其作业效果与农田地形测绘精度密切相关。获取精准的农田数字地形模型,并据之划分合理的平整单元区、设定科学的平整地基准面(坡面)、规划高效的平整地作业路径,是进行精准平整地作业的先决条件[25]。农田地形数据缺失易造成平整地作业过程中平土铲吃土深度过大造成超负荷运转或平地铲空载时间过长造成效率低下等问题[26-27]。
试验结果表明,基于无人机与激光测距技术的地形测绘方法具有较高的测绘精度。与文献[17-19]相比较,本研究提出的无人机农田地形测绘系统的地面测量点的标高值测量精度分别提高3.3,195和14.3 cm。另外,本研究提出的无人机农田地形测绘方法基于激光测距技术,区别于文献[18-21]的基于航拍摄影技术的地形测绘方法,不受航拍图像重叠度与同名地物识别能力等条件的限制,具备在地物单一的农田环境下完成高精度地形测绘的作业能力。但是,受地面测量点空间分布状况的限制,该地形测绘系统不适用于大面积地形测绘作业。未来计划通过改变无人机的飞行航迹与飞行速度,优化地面测量点的空间分辨率,进一步提高空间插值地形图的精度。
4 结 论
1) 本研究面向精准平整地作业提出一种基于低空无人机与激光测距技术的农田地形测绘方法,共获取1 417组有效测绘数据,解决了人工测绘作业效率低下与基于航拍摄影技术的遥感式地形测绘精度差的问题。该农田地形测绘方法融合无人机姿态信息、高精度GPS定位数据和激光测距数据,精准获取试验地块地面测量点的三维坐标数据。
2) 农田地形测绘精度的手持 PPK-GPS验证试验结果表明,本研究提出的无人机农田地形测绘系统具有较高的地形测绘精度,在地形高差为0.804 m的试验地块可高效获取标高精度为0.052 m的地形数据,满足精准平整地作业需求。此外,采用克里金空间插值算法处理无人机测绘系统获取的1 417组有效测绘数据,获取相应的数字地形图,为科学划分平整地作业单元、规划平整地机具作业路径提供数据支持。
本研究开展了基于无人机与激光测距技术的遥感式地形测绘系统性能分析,为高效获取精准的农田地形数据提供理论参考。后续可改善地面测量点的空间分辨率、提高空间插值地形图的精度为目标,通过优化无人机的飞行航迹与飞行速度等作业参数、确定最优空间插值算法等手段,进一步深入研究面向精准平整地作业的农田地形建模方法。