针对旋转机械设备监测系统及算法的研究∗
2021-01-19
(兰州理工大学 兰州 730050)
1 引言
随着工业自动化的飞速发展,大型旋转机械设备如雨后春笋一般多了起来,致使机械设备故障率逐年大大增加,不仅对机械设备造成伤害,更有甚者引起重大事故。且机械设备中故障出现问题不局限于某个零部件,要对其多个零部件进行信号采集、信号监测、信号分析,目的是使设备安全运行,且在故障刚刚萌发时可以及时止损,保障运行安全[1]。故针对旋转机械设备,准确、及时地识别其运行过程中出现的故障,在避免机械设备引发事故发生具有重要的意义。
2 机械设备常见零部件
在旋转机械设备中,多个零部件,如齿轮、轴承、转子、扇叶等等部分,均会出现各类故障,本文针对以下三个最具有典型性的部分进行讲解。
2.1 齿轮
齿轮是机械设备中重要的传动部件,即两个具有相同模数(齿的形体)的齿轮相互啮合,齿与齿之间旋转运作,将动力由甲轴传送给乙轴[2],以完成动力传递。由于齿轮本身存在生产、安装不当或在条件不适宜下运行,容易发生故障和损伤等问题,需对其进行监测,以到达在问题初期进行及时维修,避免出现大型事故[1]。齿轮中故障的主要形式有轮齿变形、轮齿折断、齿面点蚀、齿面磨损等。当齿轮出现故障后,则会在运行过程中产生动态失衡,齿轮的不平衡运动产生强烈的非线性振动,可以对其进行采集、监测、分析运行状态的振动信号,以达到监测的目的。
2.2 转子
转子作为旋转机械的重要旋转部件,在旋转机械设备运转时,会产生一定的离心力,通过内部转子对各部分质量重新部署,来减小由转动产生的离心力,以达到动态平衡。每当旋转机械工作时,会产生大量转子运转,转子在使用时所造成的磨损份额较大,则会产生转子不平衡、碰磨等问题,所以对转子的监测也是必不可少的一部分[3]。同样,当转子出现故障之后,产生非线性振动信号,对该信号进行算法解析,达到监测目的。
2.3 轴承
轴承是旋转机械设备中核心的零件之一,用来支撑机械旋转体,将滑动摩擦力转换为滚动摩擦力,减小摩擦力,以达到快速高效运作。轴承在使用到一定年限时,会因为寿命或外部等原因出现断裂、锈蚀、电蚀、塑性变形等故障。当出现故障之后,轴承不平衡,在原有的平稳振动过程中会产生非线性和非平稳性振动[4],通过传感器采集轴承振动信号,并该信号进行处理,最终得到此轴承特征信息,进而可有效地预防重大事故的发生。
3 数据采集嵌入式设计
针对上节介绍的零部件,对其振动信号的采集是关键,该课题使用“单片机+传感器”模式,对下位振动信号进行采集,设计如下。
3.1 嵌入式硬件设计
首先进行嵌入式硬件设计,硬件原理图如图1所示。
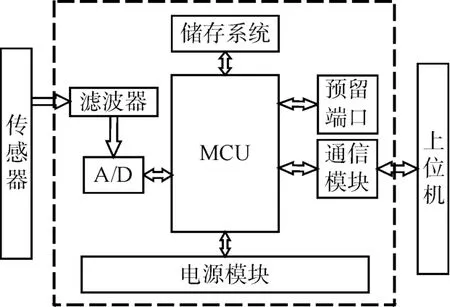
图1 嵌入式硬件原理图
如图1所示,该课题中选择的传感器为三轴加速度传感器MMA7260Q,基于振动加速度的原理进行采集信号,该传感器具有体积小、重量轻、测量全面等优势,所以在旋转机械设备中使用其采集信号最为合适。
中间部分为嵌入式硬件系统,单片机选择为STM32处理器,该处理器是一款32位、ARM内核的微控制器,作为硬件设备的MCU。A/D转换模块选取的硬件为ADXL372。当传感器采集到振动信号后,通过滤波器,将信号中的噪声等进行过滤筛选,将过滤后的信号通过A/D模块进行信号放大、转换,进而通过单片机中SPI1接口将数据从A/D模块读取出来,后由SPI2将其存储至存储器中[5~6]。
最后,MCU将储存模块中的数据调取出来,通过通讯模块,由TCP/IP协议对上位机进行数据传递,最终在上位机中显示振动信号,进而通过振动算法等方式进行对旋转机械设备的情况分析。
3.2 嵌入式主程序设计
在本节中对嵌入式程序进行设计,主程序软件流程图如图2。
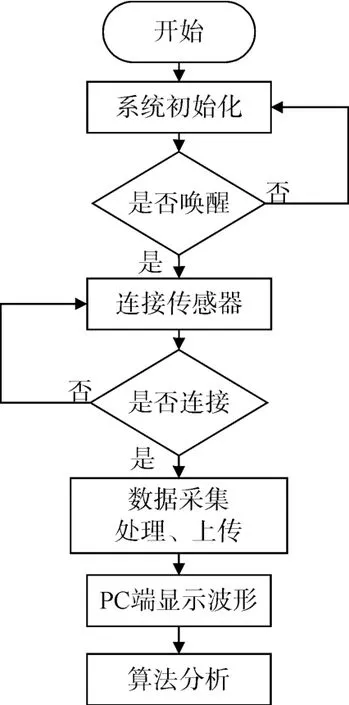
图2 主程序流程图
主程序模块的主要目的是在上述硬件设计完工后,通过软件的方式将硬件信道打通,并且实现其功能。在硬件启动后,唤醒系统并将其初始化,其中包括对单片机初始化、芯片初始化及串口初始化等。然后通过A/D模块等对传感器进行连接,当连接成功后,对采集到的数据进行处理、上传,最终在PC端进行算法的分析,当系统运行,则依次调用各个相关模块,循环控制直到系统停止运行。
4 振动算法介绍及对比仿真
经过前两节的介绍可以得出,旋转机械的主要监测对象有齿轮、转子、轴承故障;且每一种零部件在运动中,都会产生一定的振动,振动信号往往包含许多信息,过去主要采用的监测方式是人工定期预防维修,但是有一定的局限性[7~8]。现如今针对旋转机械的监测技术变得越来越先进,可以通过硬件采集技术,在计算机中通过算法进行分析,所以接下来对两种振动算法进行对比介绍。
4.1 经验模态分解算法(EMD)
经验模态分解(EMD)是一种针对非线性、非平稳信号的分解算法,它与基于傅里叶变换的算法区别就在于该方法是自适应的算法,无需基函数,通过自身信号就可以进行分析。该方法是将原始信号进行分解运算,后得到一组固有模态函数(IMF),通过每个IMF进行运算,可以得到具有物理意义的瞬时频率和瞬时幅值[9]。
EMD方法是基于三个条件进行使用:1)原始信号至少有两个极点,极小值与极大值;2)极值点间时间尺度,是唯一确定信号的局部时域特性;3)若信号缺少极值点,但存在尖点,将其通过微分获得极值点,进而进行分解[10]。具体过程如下:
1)假设信号:设原始数据为x(t),找到x(t)的局部极小值点和极大值点。
2)信号筛选:以局部极大、小值为基础获得x(t)的上、下包络线,计算出上下包络线的平均值,记m1(t),将m1(t)从原始数据x(t)中减去,得到h1(t),即如式(1):

h1(t)满足固有模式函数(IMF)条件为该函数关于时间轴局部对称。如果不满足,将h1(t)设为x1(t)继续以上第二步,直到筛选成功为止。在多次筛选之后得到一个固有模式函数(k为筛选次数),如式(2):

则此时h1k(t)记为第一阶IMF。
3)筛选条件:由Huang等人提出了仿柯西收敛准则,以两个相邻的筛选结果h1(k-1)(t)和h1k(t)的标准差SD的值作为判别条件,如式(3):
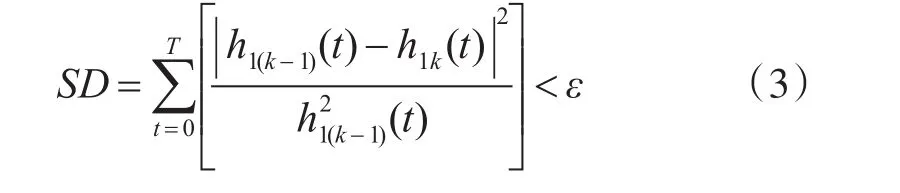
4)最终信号:当标准差SD的值小于设定阈值ε时,则筛选结果符合要求,停止筛选。最终信号被分为若干IMF和一个冗余信号的和,如式(4):

最后,对IMF希尔伯特变换运算后,该信号的时频域信息即可获得。
4.2 局部均值分解(LMD)
LMD同样也是一种自适应的分解方法,该方法通过对信号分解为若干个具有物理意义的乘积函数(PF)之和,每个PF分量能够有效保留原始信号中的数据特性,固将所有的PF分量按照瞬时频率的规律进行排列,即为原信号全部的时频分布[6]。该方法过程如下:
1)确认原始信号x(t)上的所有极值点 ni,计算相邻两个极值点ni及ni+1的平均值mi,有式(5):

将平均值mi在其对应极值点的时刻ni与ni+1之间延伸,构成局部均值线段m11(t),然后用滑动平均值法对m11(t)做平滑处理得到局部均值函数m11(t)。
2)利用已找到的原始信号x(t)的极值点ni求得局部幅值,如式(6):

与1)同理,将局部幅值ai进行延伸,在做平滑处理得到局部包络估计函数a11(t)。
3)从原始信号x(t)中分离出局部均值函数m11(t),设分离后的函数为h11(t):

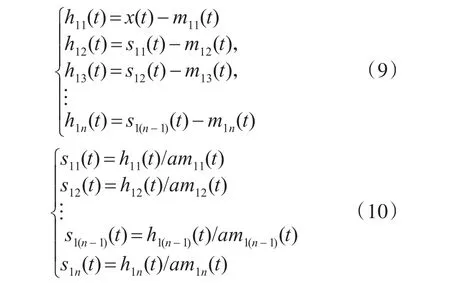
4)将h11(t)除以局部包络估计函数a11(t),为幅值解调处理,如式(8):

对s1(1t)重复步骤2),求出其包络函数a1(2t):若a1(2t)不等于1,即s1(1t)的幅值还不为1,则还需要进行幅值解调,重复这个迭代过程,直至得到一个纯调频信号s1(nt)为止,即此时-1≤s1n(t) ≤1,并且其包络估计函数恒等于1,即满足a1n+1(t)=1。迭代过程如式(9)和(10)所示:
5)利用4)中生成的全部包络估计函数求得原始信号的第一阶包络信号a1(t),如式(11)所示

6)将5)中所得到的包络信号与a1(t)迭代所得的纯调频信号s1n(t)相乘就得到了第一阶PF分量,如式(12):

7)将以上步骤所得到的一阶PF分量PF1(t)从原始信号x(t)中分离出来,后对剩余信号重复1)到6)的分解过程,又剥离出若干PF分量,依次将这些PF分量从原始信号中分离出来,直到剩余信号uk(t)为单调函数停止,如式(13):
由以上七步完成原始信号的分解,将原始信号分解成n个PF分量和一个单调函数uk(t)。即:

4.3 EMD与LMD的仿真测试图
如图3~5所示,图3为原始信号,将原始信号通过EMD以及LMD的算法进行仿真,仿真图如图4和图5所示。
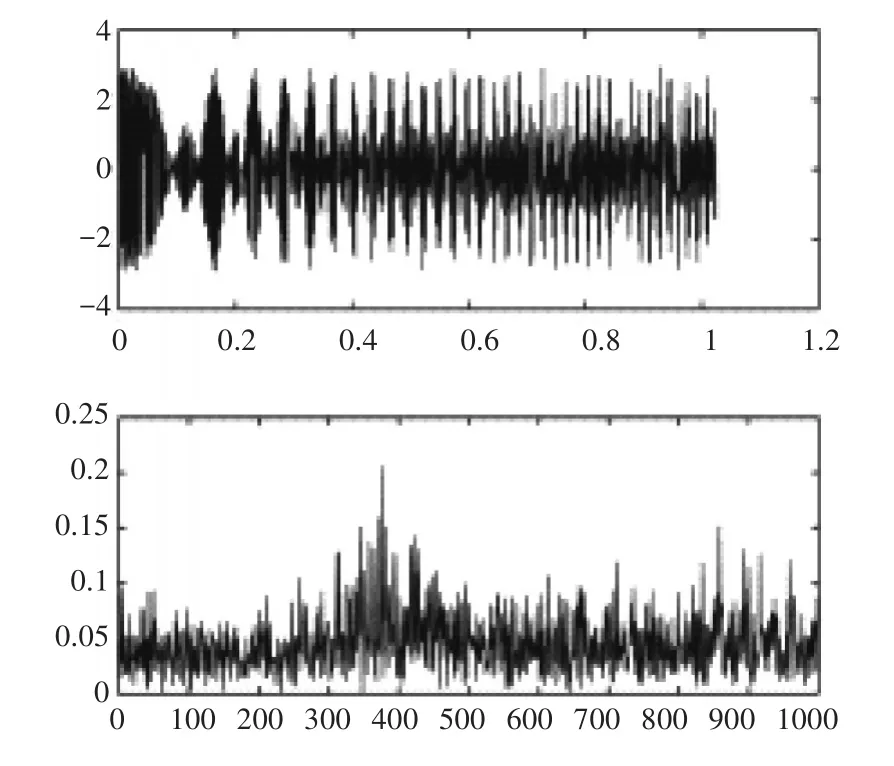
图3 原始信号及其频谱

图4 EMD方法分解结果
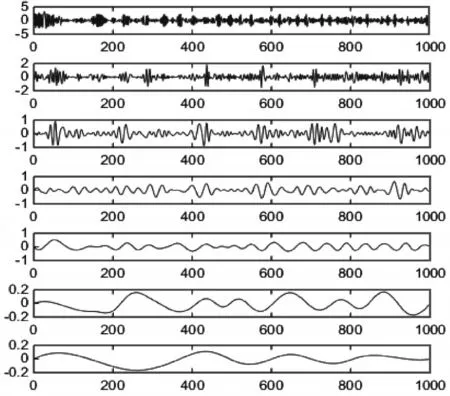
图5 LMD方法分解结果
5 算法对比分析
5.1 分解量区别
EMD分解的结果是一系列的本征模函数(IMF)。而LMD的分解结果是一系列瞬时频率具有物理意义的PF分量之和,PF实际上是调频调幅信号。两者有类似也有差别,下面对其不同做简单的比较。
1)本征模函数(IMF)须满足以下条件:在整个数据段内,极值点的个数和过零点的个数必须相等或相差最多不能超过一个;在任意时刻,由局部极大值点形成的上包络线和由局部极小值点形成的下包络线的平均值为零,也就是说,上下包络线相对于时间轴局部对称[11]。反观PF分量则无需限制条件,直接通过原始信号进行运算即可得到。
2)IMF和PF所代表的意义也不同。IMF是一个函数,分解成该函数时,并没有信号的直观观察,需通过Hibert变换后,方可对瞬时频率、瞬时幅值剖析,且多次变化会导致产生无意义负频率。在进行变换之后,可以得到分解的信号,最终得到完整的时频域信号。PF分量所代表的则是一系列具有物理意义的瞬时频率,其由包络信号和纯调频信号相乘得到,故经由纯调频信号计算后,其产生的各类瞬时频率即为连续、又为非负,可直接解析该信号。
5.2 分解运算过程区别
EMD与LMD都是进行信号的分解,但是分解过程大相径庭,对比如下:
1)由运算公式可以看出,EMD方法是对相对应的包络平均值进行分解,通过三次样条插值完成的,因此只需要二重循环,分解过程较为简单,计算量相对较小;LMD分解在进行计算时是将局域均值函数和局域包络函数通过滑动平均算法进行运算,该方法是需要多次迭循环,则会避免产生的过包络、欠包络现象。固LMD算法是一个三重循环过程,分解过程较为复杂,运算量更大。
2)由上述仿真图可以看出,EMD分解的过程中呈现出非平滑曲线,端点过于突出,在分解过程中过于密集,导致有部分信号没有分解出来,可能会对原有信号分析有一定误差。LMD的分解过程相较于EMD平滑一些,在分解极值时更为精细一些,信号分解时丢失较少,更加详细。EMD和LMD的区别在于端点效应,EMD的端点效应相较LMD,在程度上重得多,主要体现为EMD信号端点附近未知包络线的长度比LMD的长[12~13];存在特殊的信号,经EMD的结果容易受端点效应影响,如端点为极值的调幅调频信号;EMD端点效应的扩散速度比LMD快。解决端点效应后,由LMD方法获得的瞬时频率更加真实,虚假频率成分少。
6 结语
由前几节可知,一套旋转机械设备所产生故障的位置、故障类型并不单一,但进行监测的模式大同小异,都针对其所产生的振动信号进行分析。该课题对嵌入式系统以及两种振动算法进行研究,在需要快速分析振动信号时,可以使用EMD算法;但总体来说,LMD算法的优越性还是更高一些,固针对旋转机械设备信号分析时,首选LMD算法进行监测分析,以达到更好的监测效果。
