基于UWB定位的舰炮检靶系统设计研究∗
2021-01-19刘志坤张建强
刘志坤 曲 毅 张建强 刘 洋
(1.海军工程大学兵器工程学院 武汉 430033)(2.海军装备部装备项目管理中心 北京 100071)
1 引言
舰炮射击检靶系统的主要任务是确定炮弹落点位置,获取脱靶量信息,进而为射击成绩评定提供重要依据。传统的舰炮射击检靶方式主要有雷达测量、光电测量及人工事后检靶三种。它们各自存在较明显的缺陷:对于雷达测量,由于炮弹RCS面积小、飞行速度快,导致漏检率较高、精度差;光电测量受海上气象环境因素影响大、作用距离近;人工事后检靶实时性差、效率低、主观因素大。
围绕舰炮射击的高效、准确检靶问题,国内外学者开展了大量工作:文献[1]建立了一种基于多个声学传感器节点的弹丸落点测量系统,并通过模拟试验和静爆试验进行了测试,但对处理信号的信噪比要求较高。文献[2]提出了一种基于双站交会的脱靶量测量方法,将高速摄像系统布置在靶船的艏艉,实现方位360°周视成像,但作用距离较近。文献[3]提出利用多个声学基阵,通过测量超声速武器飞行过程中产生的激波确定目标位置,但仅适用于落点处速度超过声速的目标,这与大部分舰炮射击实际情况不符;文献[4]采用两类传感器,利用声波在固体和气体中传播的时间差进行靶场定位,但是系统较复杂,受环境因素影响大。总之,这些方法仍普遍采取了非协作式定位体制,其共同缺点是受目标特性变化和环境因素(海杂波、噪声等)影响较大,检靶的可靠性和精度难以保证。
与非协作式检靶体制相对应的是协作式检靶手段,通过在弹上加装信号发射机产生一个标准信号,并向靶区发送,地面站通过接收信号解算弹丸位置,从而实现检靶。这种工作方式的优点是测量精度受被测目标的影响小,易实现高精度、远距离检靶,缺点是需要在弹上有限空间加装新设备。此外,弹丸发射后高过载、高旋转会造成器件损坏。近年来,随着微电子技术和芯片抗过载技术的飞速发展,经过特殊处理的芯片能够承受20000G甚至更高过载,这使得协作式检靶手段成为可能。
本文提出了一种基于超宽带(Ultra Wide Band,UWB)定位的协作式舰炮射击检靶系统,在弹丸引信上集成UWB芯片,炮弹射出后,向靶区发射UWB标准无线信号,靶区设备接收信号,采用时差定位算法(Time Difference of Arrival,TDOA)实现对弹丸的实时精确定位。
2 系统工作原理
2.1UWB定位的特点
所谓UWB信号,是指相对带宽大于20%或者总带宽不小于500MHz的信号[5],即

式中,fH、fL分别为功率较峰值功率下降10dB时所对应的高端频率和低端频率,fH-fL表示信号的总带宽,fc表示信号的中心频率。
与其他无线电信号相比,UWB信号用于定位有以下优势[6~7]:
1)系统功耗低
UWB不使用传统无线通信系统的载波,只在需要时发出瞬时脉冲,从而降低了系统的功耗,延长了系统的持续工作时间,满足了弹载设备的低功耗要求。
2)系统结构简单
在发射端,UWB设备可以直接采用脉冲小型激励天线,不需要上下变频,不需要功率放大器与混频器;在接收端,UWB设备不需要中频处理。因此系统的复杂程度大为降低。
3)定位精度高
UWB设备发出的瞬时脉冲脉宽极窄,分辨力高,在理论上可以达到厘米级甚至更高的测距精度,从而为实现高精度定位提供了可能。
4)信号穿透力强
UWB信号具有很强的穿透障碍物的能力,这一定程度上保证了其在复杂环境下工作的可靠性,满足了弹载设备环境封闭的使用需求。
综上所述,UWB定位系统能够较好地适应弹上空间小、能源有限、环境封闭等不利条件,具备实现高精度检靶的技术基础。
2.2 系统组成及功能
基于UWB的舰炮射击检靶系统主要由信标弹、靶区定位系统、无线数据传输系统和辅助设施构成,如图1所示。
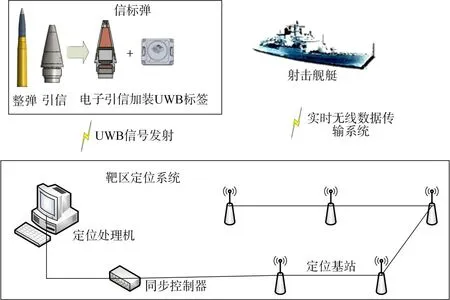
图1 系统组成框图
1)信标弹
信标弹是对制式炮弹引信进行改装、用于射击训练与考核评估的一种训练弹。该弹在保持原有弹种基本不变的基础上,仅对弹丸引信进行了技术改进。具体改变为将原有电子引信的电路部件改装为UWB信标,发射用于精确定位的UWB信号。
2)靶区定位系统
该系统由多个定位基站、同步控制器及定位处理机组成。其中,定位基站布设于靶区,负责接收信标弹发出的UWB信号;同步控制器协调整个定位网络系统,其主要功能是向所有定位基站发送同步控制命令,协调定位时序;发送定位系统标识信号唤醒临空的信标弹,并安排信标弹的定位时序;接收各临空信标弹传输数据;汇集各定位基站定位数据,传输到定位处理机。定位处理机采用时差定位方法解算信标弹的位置。
3)无线数据传输系统
该系统由超短波通信子系统和北斗卫星通信子系统组成。其中,超短波通信子系统实现靶区定位信息向射击舰艇的实时传输。北斗卫星通信子系统则负责超视距条件下的远程数据传输,必要时可实现靶区定位信息与岸基指挥所之间的传递。
4)辅助设施
2.3 系统工作流程
如图2所示,基于UWB定位的舰炮射击检靶系统工作流程如下。
步骤1:地面控制基站借助高精度时间同步技术,通过电缆延迟测算、统一授时,完成各定位基站间的精确时钟同步;
步骤2:完成同步之后,控制基站通过2.4GHz的无线通信信道,向空中来袭炮弹上的信标发送“开始定位”指令;
步骤3:弹载信标收到“开始定位”指令后,发送一组UWB脉冲序列;
步骤4:信标发射的UWB脉冲序列被地面各个定位基站接收,各个基站通过UWB信号检测技术,根据自身已同步的时钟,确定该UWB脉冲序列信号的到达时间;
步骤5:各个定位基站将到达时间值通过有线电缆传输给控制基站,控制基站统一处理后即可得到炮弹信标发射的UWB信号到达各个基站的时间差;
步骤6:根据多组时间差,利用时差定位算法即可实现对弹载信标的精确定位,从而确定弹丸落点位置。
同课异构必须要考虑文本的题材和体裁特点。教师常常会依据文体特征设计课堂,因为这样最便于学生直观、感性地了解、体验学习的内容。比如,诗歌是用来诵读、吟唱的,剧本是提供表演的,像这样文体特征鲜明的文本,在异构上也是可以做文章的。比如,讲授《雷雨》这样的剧本,就可以尝试以下两种同课异构设计思路。
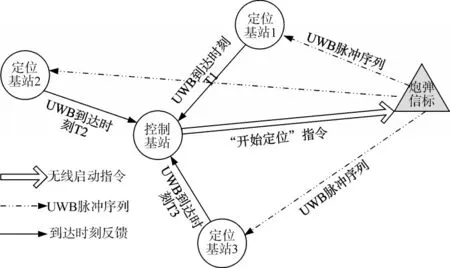
图2 检靶系统工作流程示意图
2.4 定位算法
本检靶系统采用基于时差的目标定位算法[8~9]。该算法通过测量目标信号到达不同定位基站的时间差,利用双曲线交叉进行定位。其优点是只需定位基站之间保持时钟同步,不要求定位基站与被测对象之间的严格时钟同步,也不需要知道目标信号的发出时间,使系统相对简化,同时具有较高的定位精度。
以二维平面上的时差定位问题为例,如图3所示,(x1,y1),(x2,y2),(x3,y3)分别为三个定位基站的坐标,(x,y)为目标的位置坐标。同一时刻的目标信号到达三个定位基站,由此可测得2组有效时间差Δt12和Δt13,根据距离公式,可得到TDOA定位方程组为

式中,c是目标信号的传播速度,解此方程组即可得到目标的位置。需要指出的是,该方程组通常会解出两组解,即一组真实解,一组虚假解,可以通过物理事实(如目标信号的入射方向)或者增加定位基站数量的方式消除[10]。
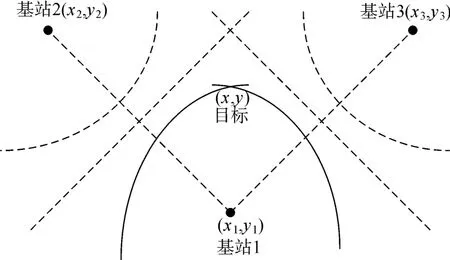
图3 二维时差定位原理图
通常,三个定位基站采用TDOA算法,可以获得二维平面内的目标位置坐标,即实现二维定位;不在一个平面内的四个定位基站可以实现三维立体定位,更多的定位基站则可通过最小二乘估计、Chan氏算法等利用冗余信息进一步提高定位精度[11]。
3 定位精度分析
影响本系统定位精度的因素主要包括时差测量误差、定位基站自身位置测量误差两个方面。
3.1 时差测量误差
时差测量误差是引起目标定位误差最主要的因素,这是由于UWB信号的传播速度为3×108m/s,由式(2)、(3)可知,即使是非常小的时间差,转化为距离后都会变得很大,相关研究表明,对于电磁波信号而言,纳秒级(10-9s)的时差测量误差即可导致数米的定位误差[12]。引发时差测量误差的因素有:
1)UWB信号到达定位基站接收天线后,进入基站检测系统的时间误差Δt1
对于Δt1,可通过上百次时间检验平均得到,经测量,该误差小于200ps。
2)检测系统的测量时间误差Δt2
由于检测时间方法的特有属性,测量时间会因为温度的变化以及基准时钟的稳定性变化而产生误差Δt2。降低该误差的途径有通过器件优选和良好的电路匹配设计,改善电路抖动误差;增加A/D的位数,减小采样误差。经过处理后,该误差为±100ps左右。
3)同步时钟的相对误差Δt3
同步时钟由超高速逻辑器件以及高速FPGA、DSP,经过严格的算法产生。但由于器件本身带来的时钟抖动,同步时钟也存在误差Δt3,经过测量,该误差约为±80ps。
基于以上对时差测量产生误差的分析可知,用于TDOA算法解算的时差测量误差Δt可以控制在400ps内,即时差测量误差小于0.4ns。换算为距离误差为

即在此时差误差下,TDOA算法的定位精度可以控制在亚米级。
3.2 定位基站自身位置测量误差
TDOA算法中需要确定定位基站自身位置坐标,该信息是通过相关设备测量获取的,受测量设备固有精度限制,存在测量误差,进而影响目标定位精度。
激光测距仪和差分GPS设备是常用的测量定位基站位置手段。其中,激光测距仪的误差在0.5m左右,差分GPS设备的误差则小于0.1m。此外,可以通过多次测量求平均值的方法,进一步降低测量过程中的随机误差。
4 实测及结果分析
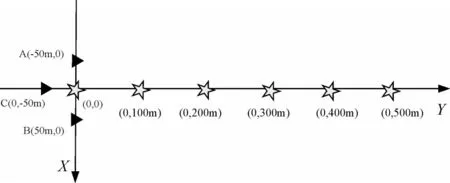
图4 基站布设示意图
为验证系统性能,进行了实际测试。如图4所示,在地面布设3个定位基站(如图中“▲”所示),以基站A和基站B的连线为X轴,其中点为原点定位建立相对坐标系,基站坐标分别为(-50m,0)、(50m,0)、(0,-50m)。在Y轴(过原点和定位基站C的连线)上,设置不同距离的多个测试点(如图中“☆”所示),在不同测试点安放UWB信标,测试系统是否有稳定的定位解算结果,从而对不同距离下系统定位精度进行检验。
试验中,采用均方误差作为系统定位精度的评价指标,其计算式如下:

式中,ε是测量值与真实值间的误差,n是测量次数,本次试验每个测试点定位100次,取平均值作为最终的定位结果。
第一次试验采用激光测距仪确定定位基站位置,系统在不同距离上对UWB信标的定位结果如表1所示。
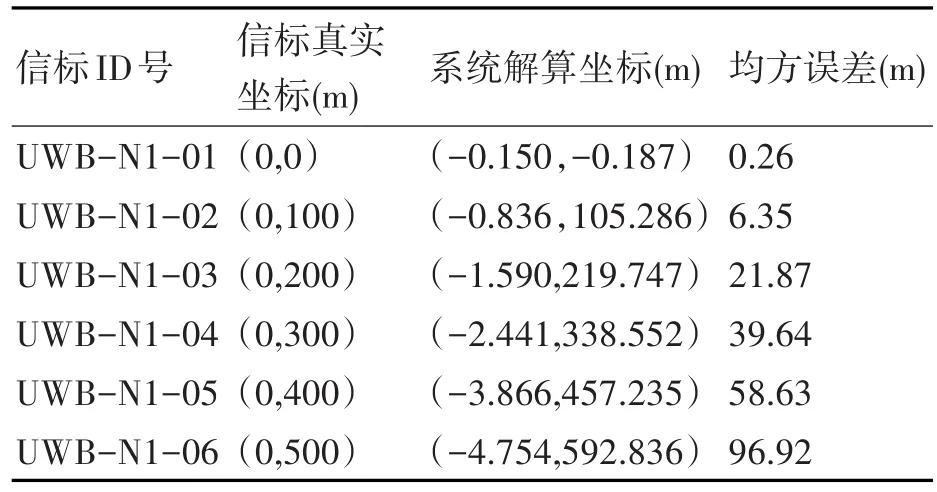
表1 第一次定位结果
为了进一步提高定位精度,同时检验定位基站位置误差对信标定位精度的影响,第二次试验采用高精度的差分GPS设备确定定位基站位置,系统在不同距离上对UWB信标的定位结果如表2所示。
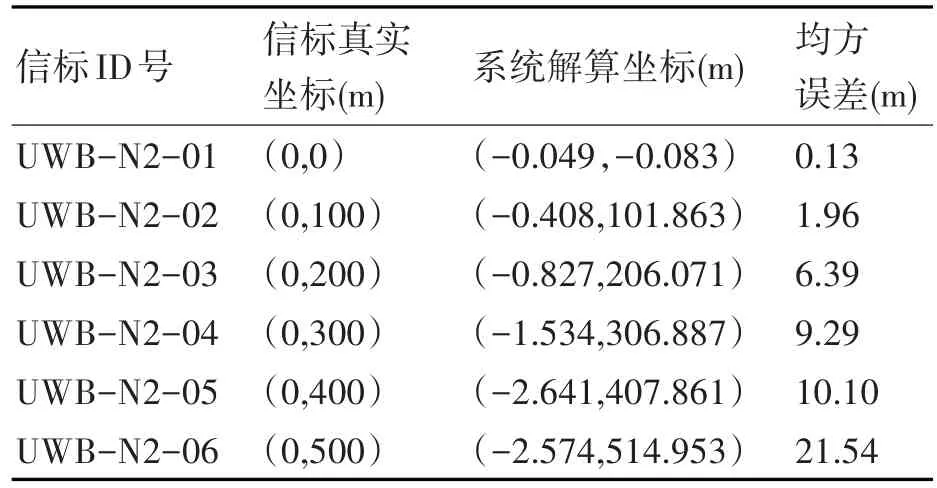
表2 第二次定位结果
试验结果表明:
1)本系统能够对不同距离上的多个测试信标进行定位,初步验证了系统的有效性。随着UWB信标与观测区域距离的增加,定位误差不断加大,这是由于采用TDOA定位算法时,在定位基站阵元间距一定的前提下,目标越远,对于接收信号的分辨力越差,时差测量相对误差越大,从而导致定位误差增大。
2)定位基站自身坐标的测量误差对UWB信标定位精度有较大影响,第一次定位时定位基站自身位置测量误差在0.5m左右,第二次定位时定位基站自身位置测量误差小于0.1m。对比表1和表2的数据,第一次定位的均方误差明显超过第二次,且随着信标距离的增加而扩大。因此,在实际应用中,必须利用差分GPS等高精度定位设备,对定位基站坐标进行准确地测量和标校。
3)当UWB信标距离观测区域靶区较近时(距离靶区坐标原点100m以内),定位均方误差小于2m,大大优于目前普遍采用的雷达、光电等非协作式检靶设备精度指标(10m左右)。当信标距离观测区域靶区较远时(距离靶区坐标原点400m以外),定位值的均方误差虽然会超过10m,但由于当炮弹落点超过靶区400m时,其射击成绩无效,此距离上的目标并非检靶系统关注的观测对象,因此,系统检靶精度可以保障。
5 结语
本文提出了一种基于UWB定位的协同式舰炮射击检靶系统,设计了该系统的组成结构和各部分功能,规划了系统工作流程,对影响定位精度的各项因素进行了分析,并通过实测验证了系统的有效性和定位精度。较之现有舰炮射击检靶手段,该系统对目标的定位精度大为提高,为舰炮射击检靶提供了一种可行的新思路,具有较强的军事价值和良好的应用前景。
