电子对抗手段干扰无人机GPS/INS导航系统效能分析∗
2021-01-19
(海军航空大学 烟台 264000)
1 引言
无人机具有隐蔽性强,探测困难和造价低廉,效费比高的优势,向当前的防空作战力量提出了巨大挑战。无人机集群作战是数量较多的无人机组成集群集体行动,具有智能化、网络化、分散化的特点。针对无人机集群,传统的防空武器抗击效果并不理想。一方面是因为无人机集群具有“低小慢”目标特性,探测困难,而且对传统防空导弹武器系统制导跟踪也提出了很大挑战,传统防空系统当前处于“看不到”、“辨不清”、“打不了”的困难局面。而针对无人机集群这样一个集成信息化作战平台,严重依赖于导航系统、通信系统、网络系统,软杀伤具有明显优势。现有无人机多采用GPS/INS复合导航系统,通过压制干扰GPS导航系统,可以增大导航误差,降低无人机作战效能,成功起到抗击效果。本文针对电子干扰压制GPS导航系统对无人机导航系统的影响进行定量分析,为提高电子干扰无人机效能提出一些建议。
2 GPS系统组成及原理
GPS导航系统采用码分多址的通信体制实现导航信号的广播。GPS卫星星座由24颗导航卫星构成,在地球任何位置任何时间至少有4颗卫星同时位于地平线以上,最多则可以达到11颗。GPS导航系统主要通过两种方法得到距离观测量:一是测量伪距,即测量导航信号从GPS导航卫星发射到接收机的时间;二是测量载波相位,即测量GPS卫星导航信号传播过程中产生的相位差。GPS卫星导航系统就是通过对不同卫星进行伪距或相位测量,利用距离交会原理,联立方程组,解算出接收机的空间位置[1~3]。
3 GPS天线方向图
GPS接收机天线方向图是向上的,具有抑制低空杂波信号和干扰信号的能力。GPS接收天线的方向图如图1所示。
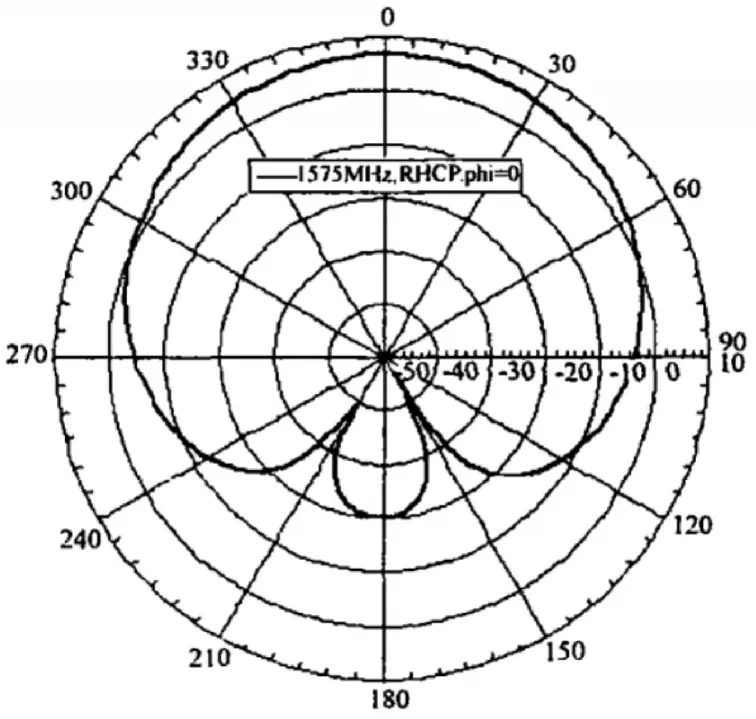
图1 典型的GPS接收天线方向图
4 GPS干扰方程
对GPS导航系统实施压制式干扰就是通过发射干扰信号使得进入接收机的干扰信号强度高于GPS信号解扩的强度,使接收机无法截获跟踪GPS信号。
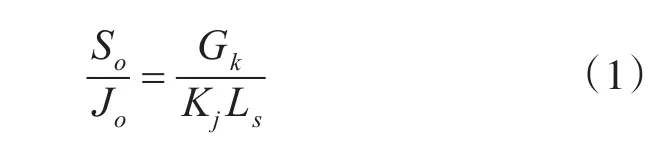
式中So为GPS接收机接收到的导航信号强度,Jo为GPS接收机接收到的干扰信号强度,Gk为GPS系统的扩频处理增益,Kj为接收机的干扰容限。Ls为GPS信号在整个传播过程中的系统损耗。
假设GPS干扰为全向天线,则GPS干扰方程为

式中Pj为干扰机发射的干扰信号功率Gj为干扰机发射干扰信号的天线增益,Grj为GPS接收机天线在干扰信号到来方向上的增益,Rt为GPS卫星与GPS接收机之间的距离,Pt为GPS卫星发射导航信号的功率,Gt为GPS卫星天线在接收机方向上的增益,Grs为GPS接收机在GPS卫星方向上的增益,Rj为GPS接收机与干扰机之间的距离[4]。
4.1 GPS/INS导航误差分析
GPS系统定位精读高,而且不会随着时间造成导航误差的积累,但是从卫星发射的导航信号传播到达接收机非常微弱,虽然采用了扩频技术,但是抗干扰性还是很弱。INS系统短时间内精读较高,而且抗干扰性较强,但是存在积累误差。即INS陀螺存在漂移误差,而且系统导航误差会随飞行时间的增加而不断增大。因此,人们通常将两种导航方式结合起来进而提高导航系统的精度和抗干扰能力。GPS/INS导航是无人机常用的一种导航方式[4~5]。
对采用GPS/INS组合导航系统导航的无人机而言,通过对其GPS导航系统实施压制式干扰,那么GPS导航系统将无法提供正常导航,无人机只能通过INS独立进行导航。整个导航系统只有INS发挥作用,其漂移误差无法得到修正,会随着时间不断积累[7~9]。由于INS系统的漂移误差是随机的,随着时间积累,无人机的实际飞行航线会相对于计划航线产生偏移,最终实际到达点相对于计划到达点会有一个圆概率偏差,即实际攻击位置不一定是计划攻击位置,不一定能够命中目标[10~12]。无人机的速度为v,GPS导航系统受干扰的飞行航线长度为Rd,INS系统的角误差漂移速度为σ°/s,则无人机实际飞行航线的角度的偏差为

无人机的圆概率误差CEP为

4.2 干扰条件下的实际航路
假设自无人机进入干扰范围开始实施干扰,实施干扰的起始时刻为tS,终止时刻为tT。突防阶段无人机保持匀速v飞行,若无人机飞至预定攻击目标位置Ri过程中,累计受干扰时长为ti,则最终到达攻击目标位置Ri的圆概率误差可表示为

假设αi服从 [0,2π]上的均匀分布,r在[0,σCEPi],[σCEPi,2σCEPi],[2σCEPi,3σCEPi]区间内均服从均匀分布,则αi可表示为

ri可表示为
式中rand是在[0,1]上均匀分布的随机数,即rand的概率密度函数可以表示为

向量B满足表1所示分布律。

表1 向量B的分布律
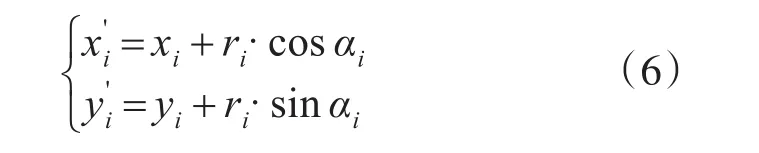
现在以无人机集群预定的攻击目标位置作为坐标原点,建立直角坐标系,那么xi=0,yi=0,实际攻击位置坐标为
5 算例及分析
某型要地防空武器系统具备电子干扰功能,可压制来袭目标GPS导航系统,要地重要防护目标范围直径1km;来袭无人机集群为二类无人机,无人机飞行速度为300km/h,采用GPS/INS复合制导,INS系统角误差偏移速度为1°/h。
通过Matlab进行仿真计算,用蒙特卡洛法模拟无人机攻击情况,模拟次数为2000次。
将无人机实际到达位置为以原点为中心的直径为1km的圆内则算作攻击成功,那么通过统计,无人机最终攻击成功概率P=0.4005;则电子干扰抗击无人机成功概率Pr=1-P=0.5995。
无人机实际到达位置散布如图2所示。
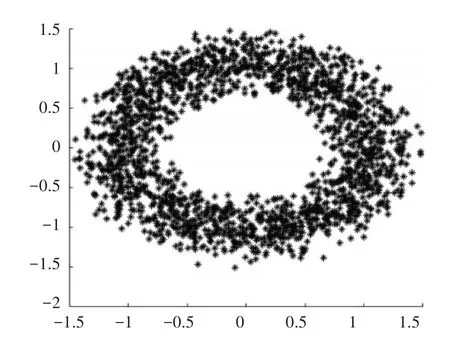
图2 压制距离为90km时无人机实际到达位置散布
当压制距离降低到60km时,无人机最终攻击成功概率P=0.4150。则电子干扰抗击无人机成功概率Pr=1-P=0.5850。
无人机实际到达位置散布如图3所示。
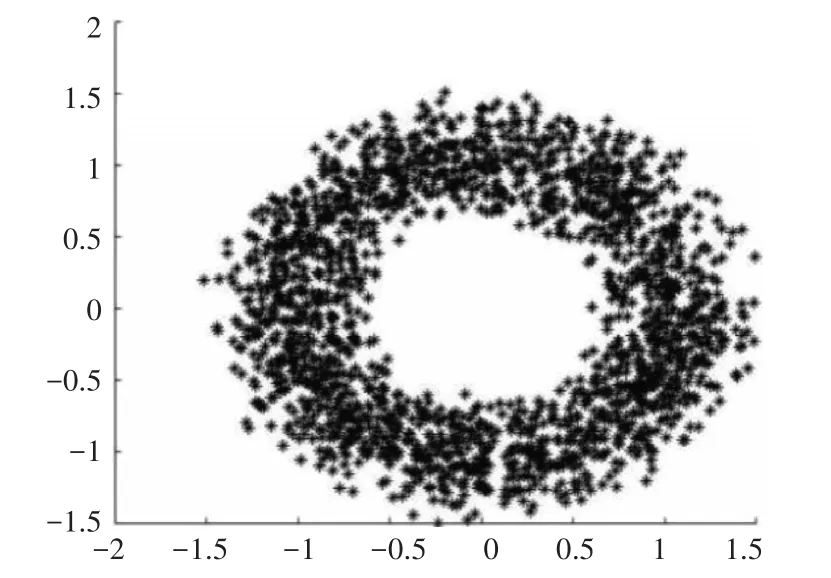
图3 压制距离为60km时无人机实际到达位置散布
当压制距离降低到30km时,无人机最终攻击成功概率P=0.4165。则电子干扰抗击无人机成功概率Pr=1-P=0.5835。
无人机实际到达位置散布如图4。
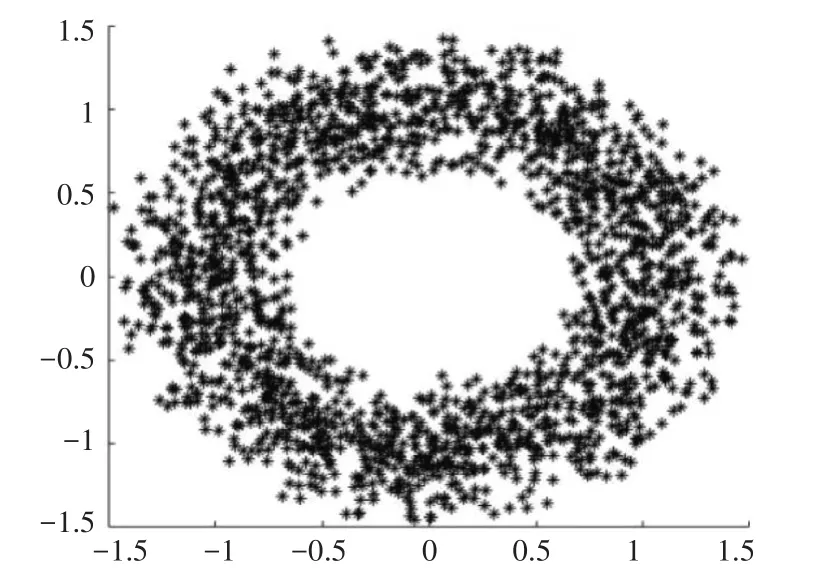
图4 压制距离为30km时无人机实际到达位置散布
最终在对GPS干扰距离分别为90km,60km,30km时,经过蒙特卡洛仿真结果进行统计,干扰成功的概率见表2。

表2 GPS干扰设备不同压制距离下的干扰成功概率
通过仿真结果可知,当GPS压制干扰作用距离增大时,会增大GPS/INS导航系统导航误差,使得到达预定位置的偏差增大,压制作用距离越大,干扰成功概率越大。
6 结语
根据仿真情况,为提高电子干扰武器干扰无人机集群GPS/INS导航系统效能,应该合理配置,充分提高干扰作用距离。一方面可以通过合理配置,充分发挥电子干扰武器效能,尽可能扩大压制干扰作用范围;另一方面尽量通过前期侦察观测,确定来袭无人机集群方向,实施定向干扰,提高干扰作用距离。