高精度测速算法实现于二次雷达系统研究
2021-01-15熊朝廷
熊朝廷 黎 亮
(四川九洲电器集团有限责任公司,绵阳 621000)
1 雷达的分类及其原理简介
雷达一词为无线电检测与测距(Radio Detection and Ranging)的缩写,雷达从技术体制上大至可以分为两类:一次雷达和二次雷达。
一次雷达通过射频天线向空中发射周期性高功率射频电磁脉冲,如果该电磁脉冲遇到了障碍物则其部分能量会被反射回发射端。不同类型障碍物的反射信号具有不同的特征,发射端通过检测自身发射脉冲回波的方式就能探测确定空中目标。
二次雷达的工作原理为机载应答装置,协助询问端完成对目标的探测确认工作。二次雷达和一次雷达的根本区别在于探测原理的不同。一次雷达依靠目标对雷达发射的电磁波的反射作用工作,它可以主动发现目标并且定位:二次雷达则是在地面站和目标应答器的配合下,采用问答的方式进行工作,它必须经过2 次有源辐射电磁波信号(询问与应答各1 次)才能完成应有的功能。
目前,世界上典型的二次雷达系统为用于民航交通管制的空管雷达系统,该系统兼顾军民两用性能,其采用相同的工作频段与不同的模式来区分军用及民用目标;军用模式服务于北约组织国家,民用模式服务于全球空中交通管制。该系统最基本的功能为目标身份确定、测距和测向,其测距和测向的方法与一次雷达采用的方法相同,但不具备测速的能力。例如,最新的M5 军用模式二次雷达系统,也仅仅通过数据共享的方式新增了一种定位技术,但仍然不具备主动测速的能力。为此,本文从二次雷达系统技术体制的角度出发,分析二次雷达系统实现高精度测速的可能性,并给出相应的数学模型和仿真分析,以期能为二次雷达系统的技术体制和工程应用发展提供新的思路。
2 条件分析
2.1 条件
二次雷达系统一般由询问端和应答端两部分组成,且雷达信号的上下行收发频率不同。以目前最常用的二次雷达系统空中交通管制系统为例,应答端为空管应答机,安装于民航飞机上,由上、下应答天线和主机组成;询问端为空管询问机,安装于各大机场,由询问天线和主机组成。该系统的基本工作条件如下:(1)信号收发频率不同(上行fI0,下行fT0);(2)询问端和应答端设备本振信号不同源即不相参(频差不确定);(3)询问端和应答端的收发频率各自相参。
2.2 相参实现
一次雷达通过测定回波多普勒频偏的方式来实现对目标的测速。参考一次雷达慢时间积累处理原理(简称慢时处理)进行测速,二次雷达的询问端和应答端均可实现测速。利用此方式考证二次雷达系统的测速能力时,要求系统询问端与应答端的信号频率完全相同,但在实际缺乏时统参考的背景下该条件难以达到,不具备工程实现意义。
3 测速原理
基于二次雷达系统询问端和应答端收发频率的不同,本文提出另一种测速方法:让询问端一方获得应答端的相对速度,并且降低双方必须完全同频的要求,允许询问端与应答端本振源之间存在频差。
3.1 应答端测速
将询问、应答的上下行标准频率表示为fI0和fT0,因频偏的关系询问端和应答端实际工作使用的上行询问频率分别为fI1和fI2。
设应答端相对询问端的接近速度为v,则应答端接收可估计出询问信号频偏为:

上式表明只有当询问端的询问发射频率与应答端询问接收频率完全相等或差异已知时,询问信号频偏才能用于估计相对速度。
3.2 询问端测速
在应答端的配合下,询问端可以从应答信号频偏参数中估计出相对速度,步骤如下:
步骤一:应答端从询问信号中获得频偏。
询问端以fI1询问上行载频发送周期脉冲串,应答端通过慢时处理获得询问接收频率fI2与询问发射信号之间的频差fΔI:

式中,ε1为应答端估计误差,上式表明应答端估计的接收频偏中的有用信号由两部分构成,第一个分量与相对速度成正比,第二个分量是询问端应答端之间频率源差异导致的询问信号载波频率差异。
步骤二:应答端以修正频率发送应答信号。
应答端计算出一个应答信号修正频率kfΔI,其中k=fT0/fI0,并将该频率补偿到应答信号中。即应答端以载频fT2=kfI2+ΔfT2发射频率为kfΔI的相参脉冲串应答信号,其中ΔfT2是应答端频率源在接收询问信号和发射应答信号间隔内的漂移引起的频偏。
步骤三:询问端解算速度。
询问端接收经过补偿的应答端相参应答信号,并通过慢时间处理获得的频偏为:
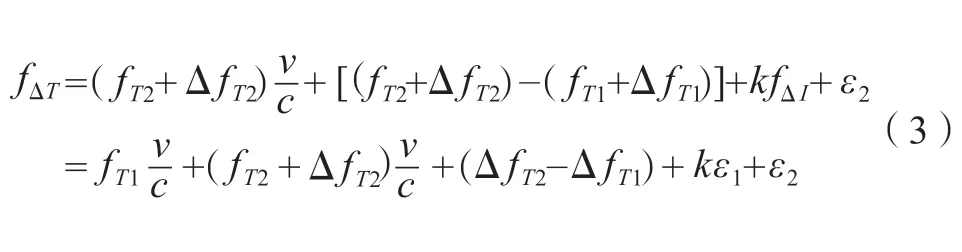
式中,ε2为询问端估计误差;ΔfT1是询问端频率源在发射询问信号和接收应答信号间隔内的漂移引起的频偏。
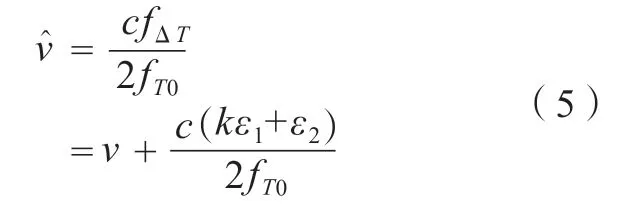
对于用类似恒温晶振等高稳、高精度时钟作为频率源的设备,其频率的短时精度至少比其标准全温精度高1~2 个数量级,因此近似为:
进而速度估计为:
3.3 测速误差
测速误差主要来自估计误差ε1和ε2,后者的理论精度受限于脉冲重复频率、脉冲数量和信噪比,如果询问端和应答端采用相同的技术体制进行设计,可以假设询问端和应答端的频率估计参数相同,则有其理论限为:
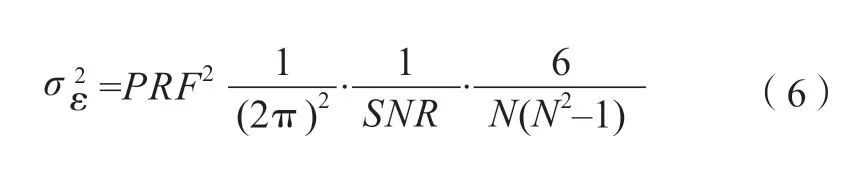
式中,N 为脉冲数量,那么速度估计的精度理论限制为:
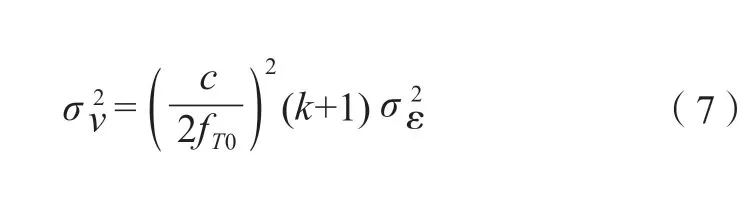
3.4 仿真验证
根据式(6),取N=4 时,对一定信噪比和重复频率范围(PRT)内的测速精度进行仿真,结果如图1 所示。
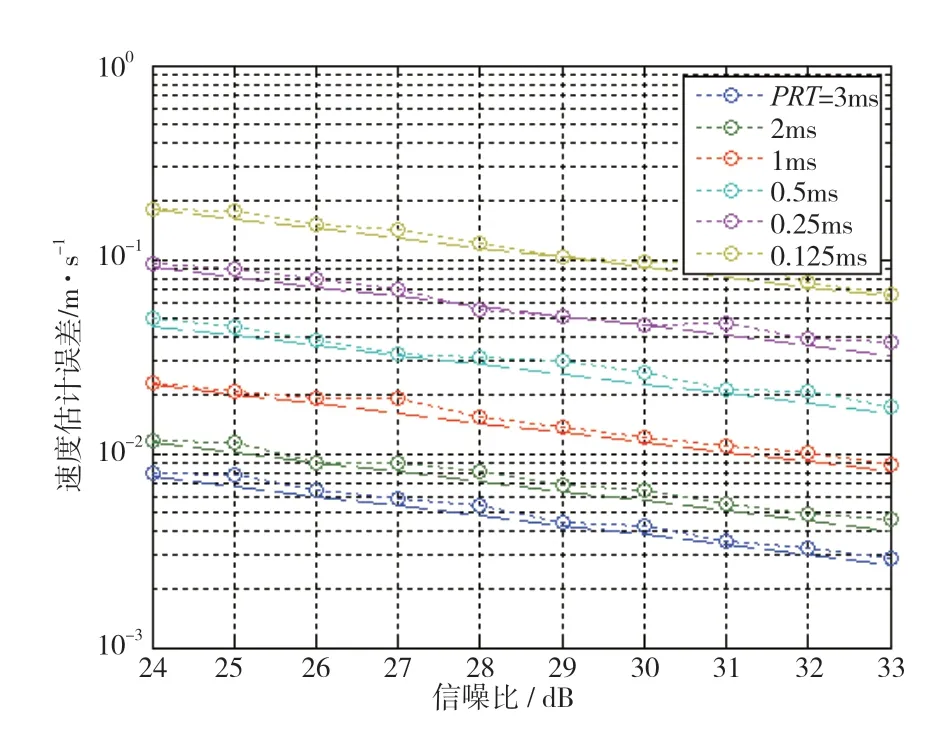
图1 速度估计误差
图1 中长虚线为理论计算的误差下限。从仿真结果可见,在仿真采用的参数范围内,仿真统计误差与理论值接近;在脉冲数量一定的条件下,测速精度随着信噪比和PRT 的增大而提高。
4 典型系统设计
4.1 系统原理设计
现行空中交通管制系统,以及西方体制的军用MARK 系列二次雷达系统的信号格式设计如图2 所示。为了不干扰现役的空中交通管制系统,所设计信号格式须避开能引起误触发应答的信号间隔,尤其是8μs和21μs 这2 个间隔。

图2 空中交通管制系统及西方体制信号格式
根据二次雷达原理,设计1 套典型的测速验证系统,其波形如图3 所示,询问端发送2 个同步脉冲和1 个测量脉冲,应答端解出信号后经测量和修正后发出1 个测量回答脉冲,询问端根据回答脉冲测量应答端的速度。

图3 波形设计图
前3个脉冲为同步脉冲,采用差分相移键控(DPSK)调制,与第一个脉冲前沿间距分别为2μs、15μs;第四个脉冲为间距测量起始脉冲,与第一个脉冲的前沿间距为27μs;3 个间距正好可以错开空中交通管制系统的需求;回答脉冲的延时要求与现役中交通管制系统的要求一致为3μs。间距测起始量脉冲与回答脉冲均采用线性调频(LFM)调制以提高信噪比。根据典型参数计算系统主要性能指标的测速精度可达到约0.1m/s。
4.2 系统架构设计
典型的测速验证系统主要由询问端和应答端组成,询问端安装于地面,一般与雷达共同安装,应答端一般安装于各型航空器上,应答端与其它航空设备一起安装于航空器的尾部设备舱内,如图4 所示。
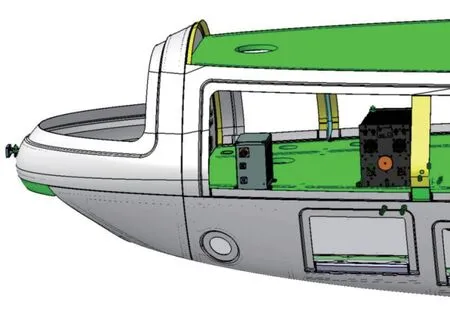
图4 应答端安装位置及安装方式示意图
询问端和应答端设备均采用模块化设计方法,均由电源和处理模块、信道模块组成,其三维模型如图5 所示。
图5 应答端或询问端设备结构图
电源和信号处理模块与信道模块信号连接通过模拟与数字混装连接器盲插连接,能够实现中频信号与低频信号的双向传输。电源处理模块中,电源板和数字板的信号连接通过低频连接器盲插连接,能够实现电源控制检测、大功率供电。
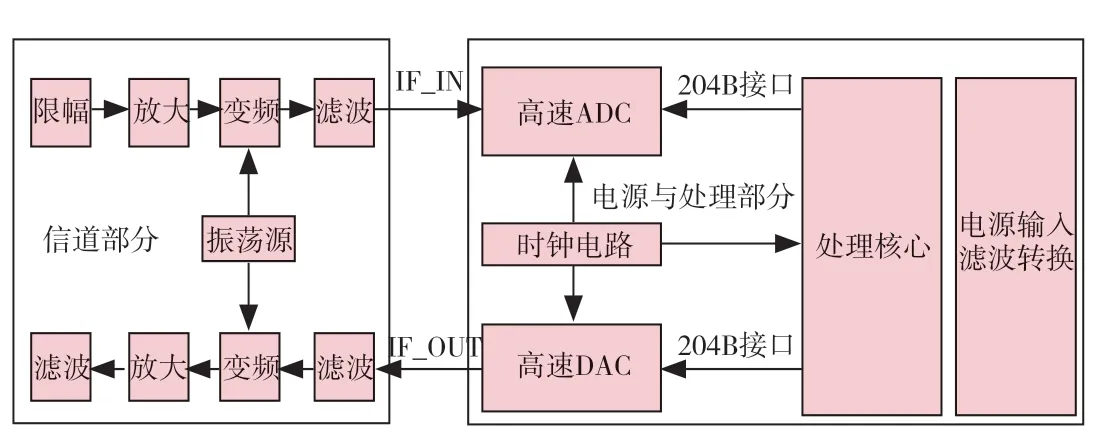
图6 应答端或询问端设备功能框图
应答端和询问端设备的功能原理框图如图6 所示,主要由处理核心、高速数模/模数转换、时钟电路、电源转换电路等组成;处理核心主要由FPGA 及其配套电路组成,可以选取Xilinx 公司的K7 系列配合其外围电路实现;高速数模/模数转换可以选取ADI 公司的高速ADC 和高速DAC 来实现,数据输入输出采用JESD204B 接口可以提高数据率降低测量误差;时钟电路可以选取ADI 或TI 公司的专用时钟芯片搭配晶振源实现;电源转换部分主要实现将外部输入电源进行滤波整形并转换成内容需要的各路电压;信道部分由振荡源、变频、滤波、限幅、放大等部分组成,主要完成所需的模拟射频信号的接收和发射,可以根据设备使用场景的需要进行灵活设计。
5 结束语
本文对二次雷达系统提出了除传统测向、测距定位能力外的第3 项高精度测速能力的设计概念,并对测速原理进行了理论推导,对测速误差进行了分析;同时,设计了典型测速验证系统,以期能在工程上实现应用,为二次雷达系统的未来开发提供相关研究支持。