极区冰下温盐剖面实时观测系统设计与应用
2021-01-14王德亮张素伟
王德亮 张素伟
研究论文
极区冰下温盐剖面实时观测系统设计与应用
王德亮 张素伟
(宜昌测试技术研究所, 湖北 宜昌 443003)
极区冰下温盐剖面的观测是极区海洋环境监测的重要方面。大量浮冰的存在是极区海洋环境的主要特点, 常规的Argo浮标、水下滑翔机等海洋观测设备无法透过冰层完成定位和卫星通信传输, 这也是极区冰下温盐剖面资料数量少、时空不连续的主要原因。为实现对极区浮冰下0~200 m深度范围进行温盐剖面观测, 基于国产HM2000型剖面浮标进行改进设计, 增加冰面通信设备、锚系平台等设备, 组成温盐剖面实时观测系统。研制过程中突破感应耦合通信关键技术, 创新性地建立岸站控制中心—冰面通信中继—冰下剖面浮标的双向通信链路。本系统于2018年8月在中国第9次北极科学考察任务中顺利完成布放和应用。
极区 Argo剖面浮标 HM2000剖面浮标 实时观测
0 引言
极区是地球系统的重要组成部分, 极区海洋环境要素的测量对研究全球海洋环境的变化具有重要意义[1]。大量浮冰的存在是极区海洋环境的主要特点, 极区冰下温盐剖面的探测成为极区海洋环境监测的重要方面。海冰生成时盐分的析出及海冰融化时表面海水的淡化使得全球温盐环流受到较大影响, 其增长和衰退不仅强烈影响海气之间的热交换, 而且影响海水表面的水平衡, 进而影响全球海洋环流。
2007年11月, “全球Argo实时海洋观测网”正式建成, 目前在海上正常工作的Argo浮标总数约3 900个, 为国际社会提供了100万条以上全球海洋0~2 000 m深度范围内的温度和盐度剖面资料[2-3], 这些海洋剖面资料覆盖了地球绝大部分海域, 已经成为全球海洋观测系统的重要支柱。但是在极区, 海表冰层厚度达到3~4 m, 常规的Argo剖面浮标无法透过冰层完成定位和卫星通信传输, 这也是极区冰下温盐剖面资料数量少、时空不连续的主要原因。同时极区低温环境下, 海洋观测设备的电池寿命也大幅缩短。
近几年国外在北极开展了冰下潜标和冰上剖面仪的布放。美国伍兹霍尔海洋研究所研制了冰基拖曳式剖面仪(Ice-Tethered Profiler, ITP), 如图1所示。该系统中位于冰下、水中的剖面仪在一个低功耗马达驱动系统的控制下, 沿一条垂直的缆绳上下移动, 同时能够连续收集海洋观测数据, 并通过卫星通信的方式将数据传回至岸基。日本JAMSTEC 公司与加拿大METOCEAN Data Systems公司于2004年合作研制极地海洋剖面浮标(POPS), 主要由一个冰上平台和水下CTD剖面仪组成, 测量的海洋、大气数据通过铱卫星通信传回到岸基。冰上平台由一个直径20 cm的铝管龙骨外围包裹离聚物泡沫组成的浮力系统, 在冰破裂或者融化的情况下能够提供足够的浮力, 还包含气象传感器、铱卫星通信系统和GPS定位系统、控制系统和锂电池。冰上部分与水下剖面浮标通过美国海鸟公司的感应式调制解调系统实现数据交换。在国际极地年期间, 美国、加拿大、日本等国家的海洋科研单位, 在北冰洋大规模地布放带有剖面仪的锚系潜标和冰基海洋自动剖面系统观测设备, 获取了大量冰下海洋要素剖面数据。法国的NKE公司基于PROVOR CTS3型Argo浮标, 通过增加锚系及冰面通信设备推出了应用于极区的PROVOR SPI型Argo浮标, 并已成功地布放在Barneo地区。国内相关科研人员也开展了一系列的极区环境监测, 但是国内尚没有成熟地应用于极区冰下上层海洋的温盐剖面观测设备。袁凯琪[4]利用电容式冰厚传感器技术开展了极地海冰厚度监测研究。李智刚等[5]介绍了水下机器人在极地考察中的应用情况,对极地考察水下机器人的未来发展趋势做了分析。方贺等[6]设计了一种用于观测北极海冰侧边界融化的水下超声波测距系统。章恒等[7]设计了一款基于Pt1000的多点低温低功耗高精度铂电阻柔性温度链,用于极地环境下对冰川冰雪的温度场剖面检测。国家海洋技术中心早期研究过冰下定点温盐测量系统, 系统水下部分锚系固定, 与冰面部分通过水声传感器进行通信。该系统通信距离受水声通信设备的限制, 通信距离短, 系统成本价格高, 系统工作时间短, 温盐测量受限为定点测量, 无法跟随浮冰测量。
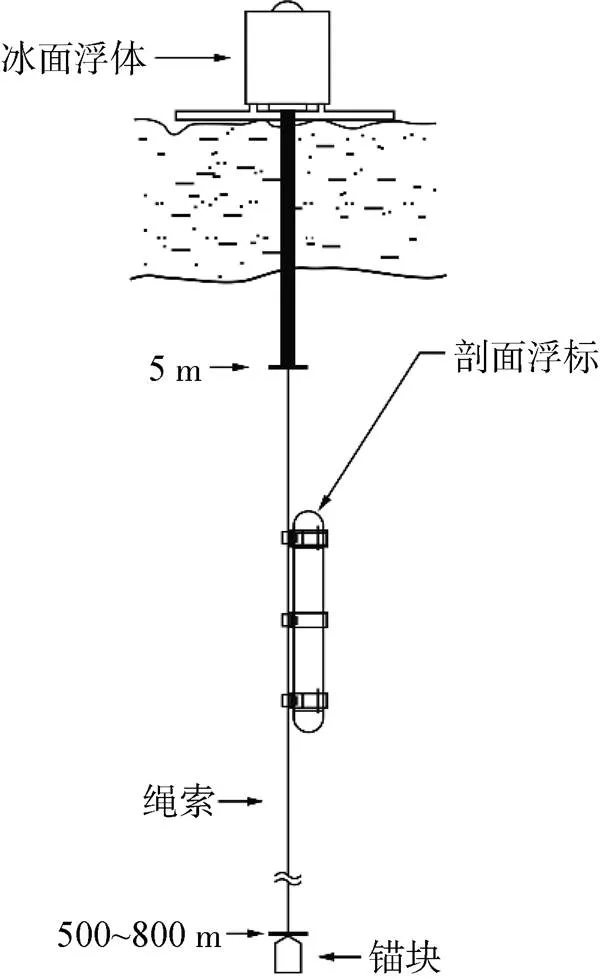
图1 美国伍兹霍尔海洋研究所研制的冰基拖曳式剖面仪
Fig.1. Schematic of Ice-Tethered Profiler of Woods Hole Oceanography Institute
本极区冰下温盐剖面实时观测系统基于HM2000型剖面浮标技术, 针对极区环境特点进行一系列改进设计, 突破(低温)冰面通信设备、水中耦合通信等关键技术, 建立岸站控制中心—冰下剖面浮标的双向通信链路, 解决了极区浮冰下0~200 m深度范围的温盐剖面实时观测的难题。本文就其系统组成、工作原理、模块设计及实际应用进行详细分析。
1 极区温盐剖面观测系统
1.1 系统组成
极区冰下温盐剖面观测系统由岸站控制中心、冰面通信设备、冰下剖面浮标和钢缆锚块等设备组成, 系统连接如图2所示。
岸站控制中心由用户计算机和网络交换机组成, 通过网络线缆连接互联网。冰面通信设备由铱星通信单元(含通信天线)、通信控制单元、耦合通信单元和电池组成。由于极地冰层在冬季时温度可以达到–20℃, 对整个系统, 尤其是电池容量带来不利影响, 因此本系统在进行冰面通信设备设计时, 仅将通信天线置于冰面, 将通信控制单元、电池、耦合通信单元封装成独立的密封舱, 置于冰层下方, 全部浸泡在海水中, 其环境温度在–2℃左右, 可最大限度降低低温环境对电池容量和电子元件的影响。
冰下剖面浮标由耦合通信单元和剖面浮标组成, 剖面浮标完成冰下温盐剖面的测量, 将测量数据通过耦合通信单元传输给冰面通信设备; 冰面通信设备下端通过转环连接钢缆, 冰下测量设备通过导向装置连接钢缆, 并沿钢缆进行升降。钢缆下端连接锚块。系统组成框图如图3所示。
1.2 工作原理
冰下剖面浮标自主改变浮标的体积, 实现上升和下潜, 在上浮过程中完成冰下200 m至水面的温盐剖面数据采集。当冰下剖面浮标上浮至冰面附近, 通过耦合通信单元将剖面数据传输给冰面通信设备, 由冰面通信设备通过铱星通信模块传输给岸站控制中心。岸站控制中心连接互联网, 实时接收铱卫星网关数据, 将数据解析后获得实时温盐剖面数据。
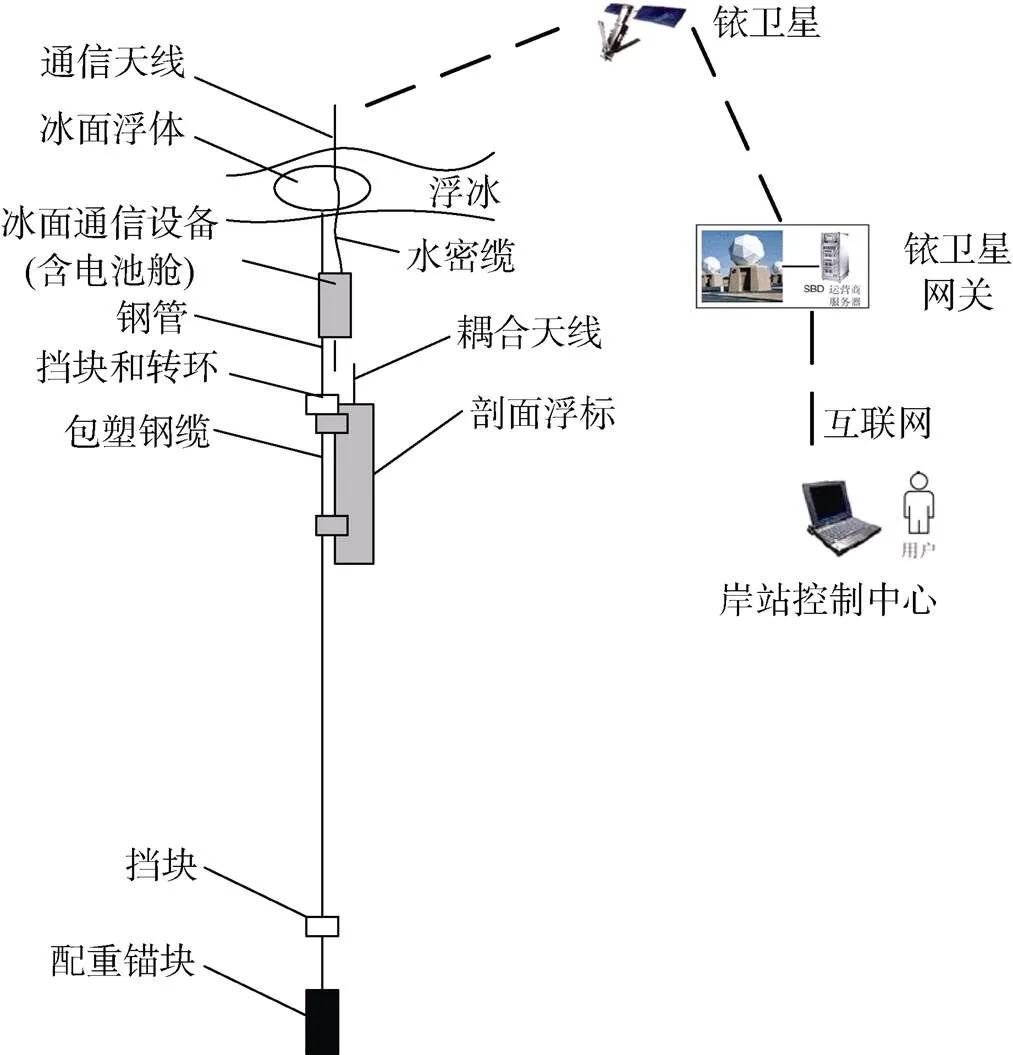
图2 系统连接图
Fig.2. System connection diagram

图3 系统组成框图
Fig.3. System block diagram
1.3 工作流程
系统工作流程如图4所示。
①设备通信: 剖面浮标初始布放或上浮到水面后, 上浮至水下5 m处, 冰下剖面浮标与冰面通信设备进行耦合通信, 将冰下设备的状态信息和剖面测量的温盐深数据上传, 冰面通信设备通过铱卫星将信息传输给岸站控制中心。
②剖面浮标下潜: 通信传输完成后, 耦合通信单元断电, 冰下剖面浮标内浮力调节模块进行抽油运动, 浮标体下端的油囊体积变小, 浮标沿着包塑钢缆自主下潜, 下潜至钢缆底端200 m处的挡块, 停止下潜, 等待设置的剖面周期时间到, 冰下剖面浮标进入休眠状态。
③剖面浮标上浮测量: 剖面周期时间到, 冰下剖面浮标退出休眠, 冰下剖面浮标内浮力调节模块进行充油运动, 浮标沿包塑钢缆上浮。在上浮过程中按照深度间隔依次进行温盐剖面测量并存储数据。当上浮到达上端挡块, 冰下剖面浮标停止上浮, 完成剖面测量, 并转入与冰面通信设备耦合通信阶段, 通信完成后, 再次开始下潜, 进行周期循环。
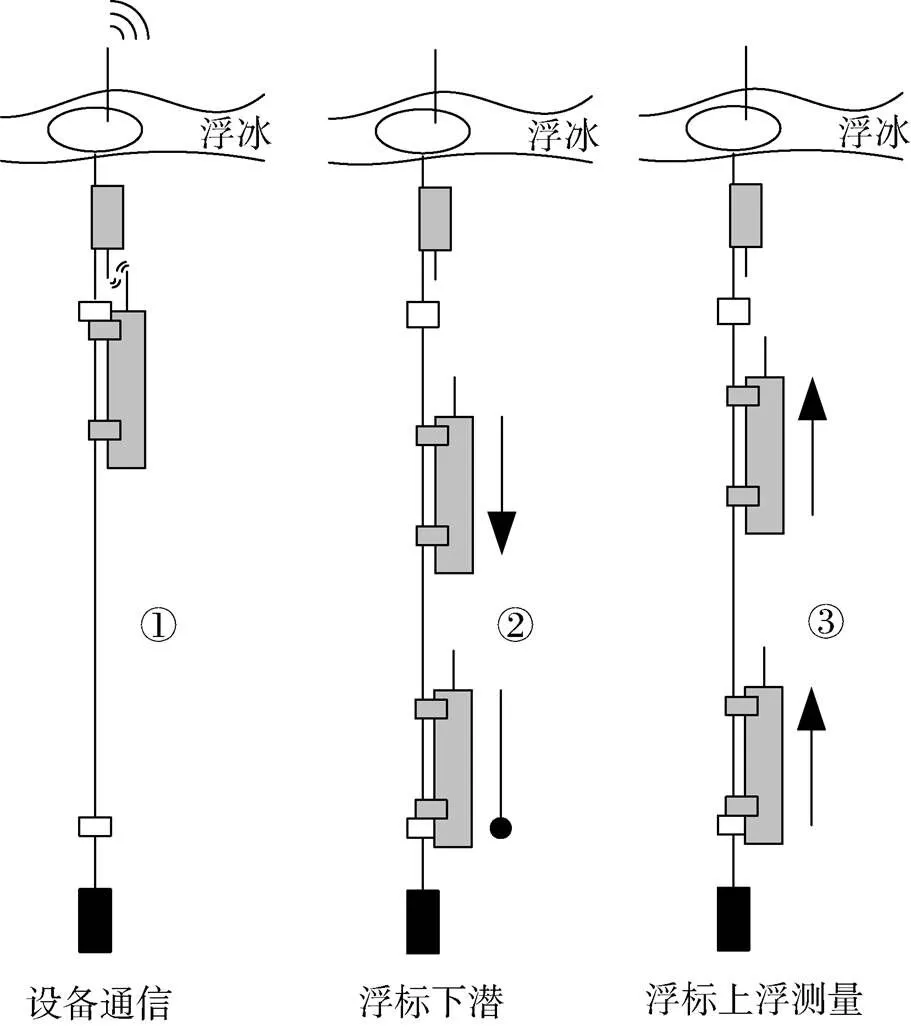
图4 系统工作流程
Fig.4. System flowchart
2 系统主要模块设计
2.1 冰面通信设备
冰面通信设备主要作用为通过耦合通信方式接收冰下剖面浮标测量数据, 并将当前GPS定位数据和冰下数据打包成完整剖面数据, 通过铱星通信模块上传至岸站控制中心。
冰面通信设备由通信控制单元、耦合通信单元和电池组成。这些单元安装在密封仓体内, 置于冰下1~2 m海水中, 并通过钢管固定在冰面浮体上。
2.1.1 通信控制单元
通信控制单元以超低功耗的MSP430微处理器为核心, 内部集成嵌入式的铱星9602型终端模块和GPS定位模快, 增加数据融合处理单元电路, 并配备标准RS232串口。为保证良好的通信效果, 将铱星天线封装在塑料外壳中, 通过水密电缆伸出冰面0.5 m高。电路板采用“防潮”、“防震”及“防盐雾”设计, 完全满足极区恶劣环境工作要求。
通信控制单元作为冰面通信中继, 通过铱星、耦合通信模块, 建立起岸站控制中心—冰面通信控制单元—冰下剖面浮标的双向通信链路。通信控制单元利用铱星9602型终端模块的突发短消息(Short Burst Data, SBD)业务, 可实现与岸站控制中心的双向通信功能[8], 铱星9602型终端模块如图5所示。通信控制单元通过RS232串口与耦合通信单元连接, 实现与冰下剖面浮标的感应耦合双向通信, 接收冰下剖面浮标测量数据, 并向冰下剖面浮标发送控制指令。通信控制单元接口关系如图6所示。

图5 铱星9602 SBD模块
Fig.5. The 9602 SBD module
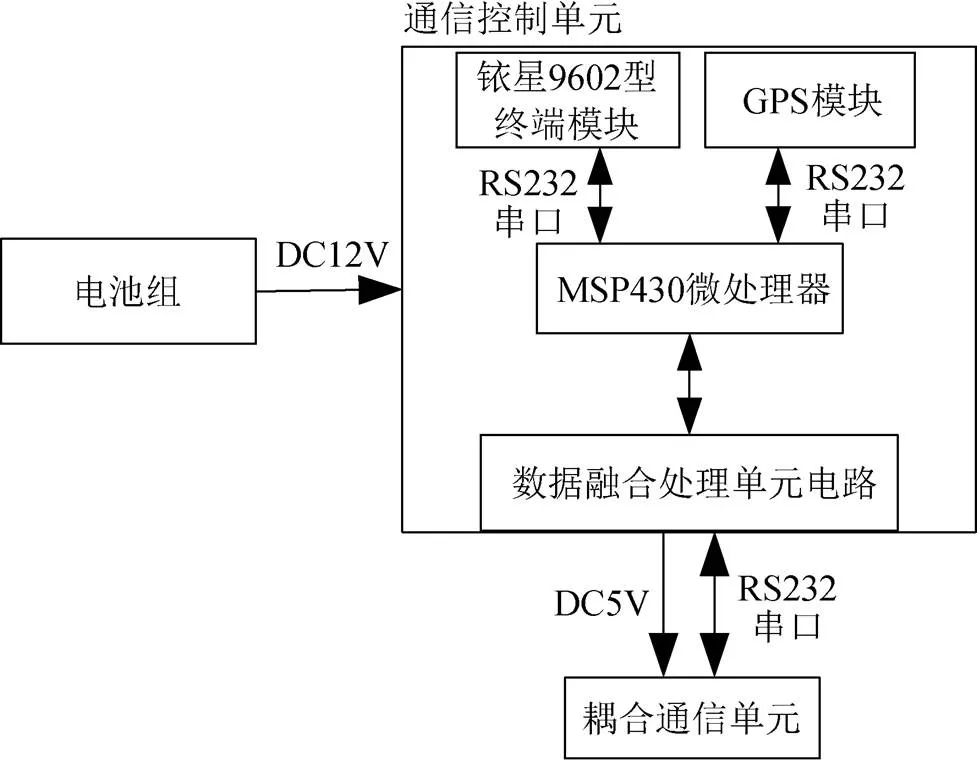
图6 通信控制单元接口关系图
Fig.6. Interface diagram of communication control unit
2.1.2 耦合通信单元
耦合通信是目前水下设备进行双向通信的常用方式, 如美国海鸟公司生产的SBE44UIM水下感应调制解调器, 加拿大RBR公司生产的MLM-1000型锚系感应耦合数据传输系统等。但这些产品均为进口, 价格昂贵, 体积较大。为此, 在研制过程中对水下耦合通信单元进行了技术攻关, 完成了基于非接触的FSK感应耦合通信的耦合通信模块研制, 在降低产品成本的同时, 实现了技术自主可控。
耦合通信模块主要由感应耦合天线和调制解调单元电路组成。感应耦合天线由感应线圈及密封外壳组成, 通过继电器控制感应线圈与调制电路、解调电路之间的连接。调制解调单元以XR2206和XR2211为调制解调芯片, 中心频率f1、f2分别为24.7KHz和27.4KHz。耦合通信时先将数字信号进行频移调制, 利用不同频率的正弦波代表数字信号“1”和“0”, 载波的频率随二进制基带信号在f1和f2两个频点间变化。其表达式和波形见图7。

Fig.7. Waveform of inductive coupling communication
本系统在冰面通信设备和冰下剖面浮标均安装FSK感应耦合通信单元, 成功实现了冰面通信设备和冰下剖面浮标的非接触式通信(图8), 相比水声通信, 具有功耗低、误码率低的优势。
2.1.3 电池
由于极地冰层在冬季时温度可以达到–20℃, 对电池容量带来不利影响, 因此本系统的电池舱位于冰层以下海水中, 其环境温度在–2℃左右, 可最大限度减少低温对电池容量带来的影响。极区特殊的环境温度对电池的抗低温性能有极大的要求。在电池选型过程中, 对两种锂电池进行了低温放电对比测试。选取目前在海洋装备中应用广泛的ER34615M锂亚硫酰氯和锂二氧化锰两种一次性锂电池。
在进行放电测试时, 充分考虑了实际工作温度、工作电流及系统工作电压等因素。将实验箱内温度设置为0℃。电池的初始电压为DC 25V左右, 系统正常工作电压范围为DC 18~30V, 因此放电截止电压设置为DC 18V。根据系统循环工作流程, 设置最大放电电流为1.25A, 缩短休眠周期, 进行加密周期性放电。两种电池参数如表1所示。
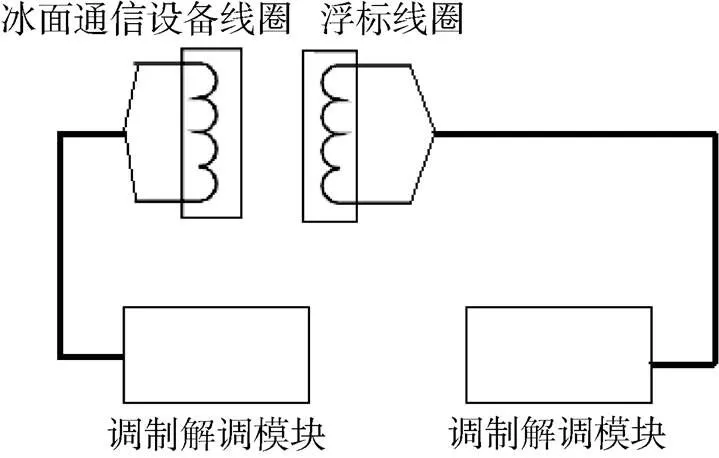
图8 观测系统中耦合通信连接方式
Fig.8. Connection mode of inductive coupling communication

表1 两种锂电池参数表
根据两种锂电池放电曲线(图9、图10)及放电测试结果(表2)可得出以下结论: (1)在相同的0℃环境温度和放电测试条件下, 两种电池在整个放电过程中都保持明显的平稳性, 电压稳定; (2)当环境温度为0℃时, ER34615M锂亚硫酰氯电池放电量为常温下标称容量的61%, 锂二氧化锰电池放电量为常温下标称容量的91%, 可见在低温状态下锂二氧化锰一次性电池可用电量明显多于ER34615M锂亚硫酰氯电池。因此系统最终选用锂二氧化锰电池。值得说明的是, 此次测试为了缩短电池放电试验时间, 采取了加大电流和加密周期进行测试, 两种电池放电分别持续了21天和32天。根据这些数据进行推算, 系统正常工作时间可达6个月。
2.2 冰面浮体
冰面浮体由固体浮力块、固定三根支架和尼龙板等组成(图11)。其中三根支架长度为1 m左右的钢管通过螺纹旋紧固定在中间的支撑块上, 支架下端为圆形浅色尼龙板, 尼龙板通过连接螺栓与固体浮力块固定连接, 固体浮力块选用密度为0.5 g·cm–3的固体浮力材料加工而成, 当出现浮冰融化或破裂时, 为整个系统提供足够浮力。

图9 ER34615M锂亚硫酰氯电池放电曲线
Fig.9. Discharge curve of ER34615M lithium battery
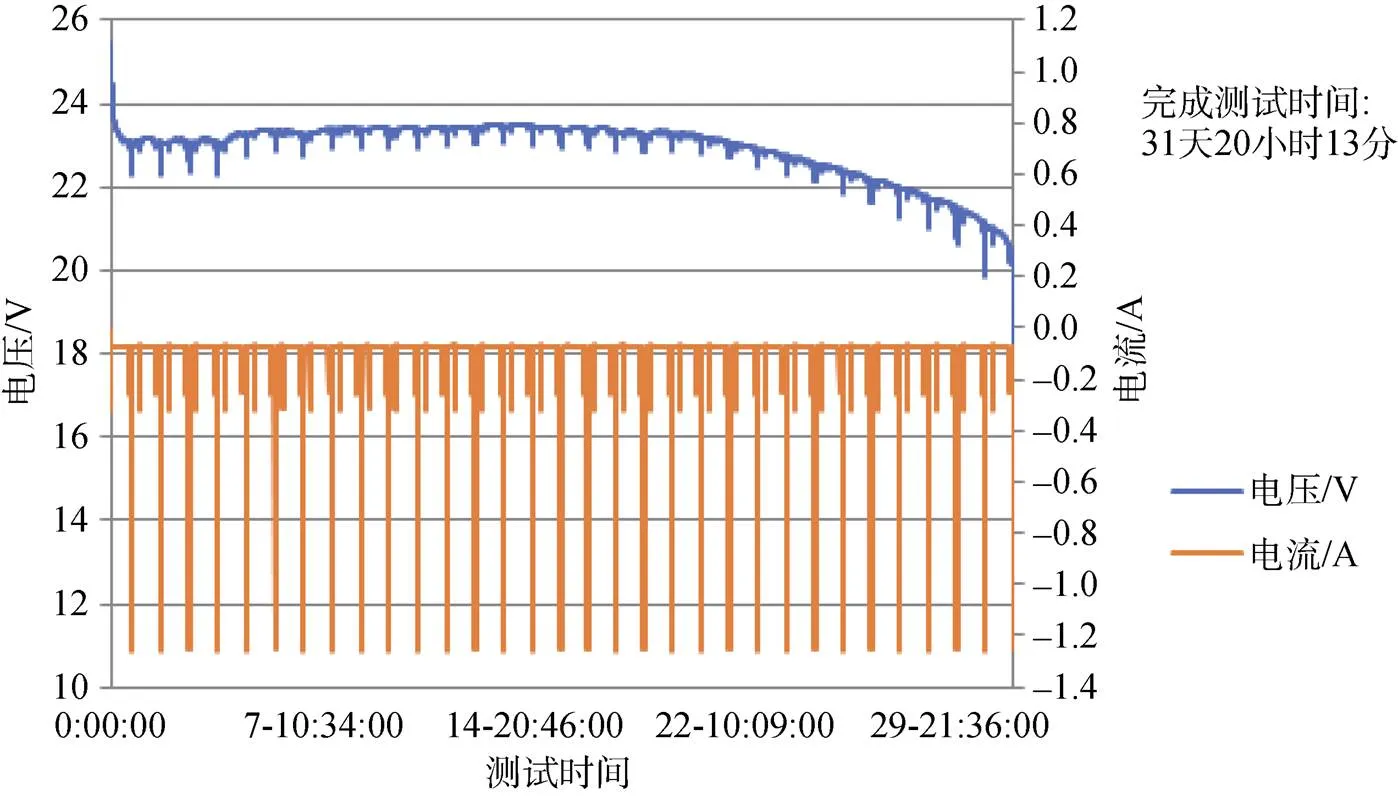
图10 锂二氧化锰电池放电曲线
Fig.10. Discharge curve of Li-MnO2battery

表2 两种锂电池放电测试结果

图11 冰面浮体
Fig.11. Floating body on the ice
2.3 冰下剖面浮标
冰下剖面浮标基于国产HM2000型剖面浮标进行适应性改进设计(图12)。HM2000型剖面浮标由宜昌测试技术研究所自主研制, 于2015年10月正式被国际Argo信息中心(AIC)接纳, 是国内唯一被国际Argo组织认可的国产剖面浮标[9]。HM2000型剖面浮标与国外同类型Argo浮标一样, 投放入水后根据预先设定参数, 自动完成下潜—定深漂流—上浮CTD测量—水面通信—下潜的剖面循环, 可在海洋中连续工作2—3年。
冰下剖面浮标搭载传感器为美国海鸟公司生产的SBE41CP型温盐深传感器, 主要技术参数如表3所示。

图12 冰下剖面浮标
Fig.12. Profiling float under ice
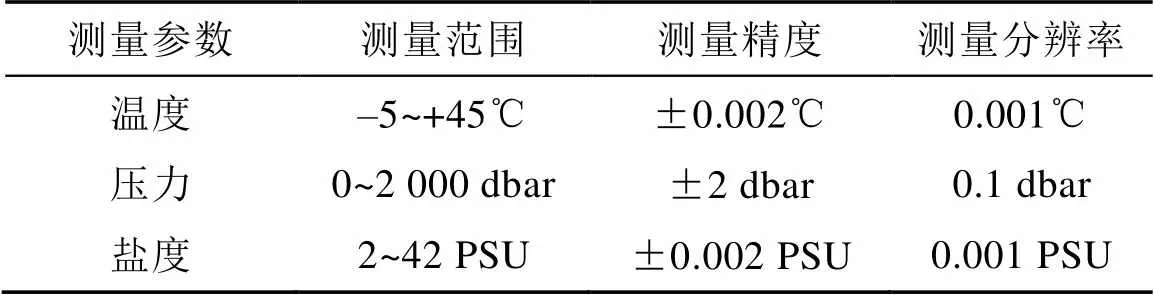
表3 SBE41CP型温盐深传感器技术参数
为适应极地冰下及锚系系留使用要求, 冰下剖面浮标主要改进设计如下: (1)将HM2000型剖面浮标的卫星通信模块更换为耦合通信单元, 天线腔体配装通信耦合线圈, 并同步完成控制软件优化改进, 实现剖面浮标与冰面通信设备的数据传输, 线圈耦合通信为自主研发, 摆脱了国外钢缆耦合通信的技术, 极大降低了设备成本; (2)在HM2000型剖面浮标的耐压壳体上设计配装固定支架和导轮(图13), 采用两部分圆筘, 中间通过螺钉固定, 安装方便, 在浮标上端和下端各安装1组, 浮标上浮和下降通过导轮沿钢缆滑行, 减小摩擦力。

图13 剖面浮标上的固定支架和导轮
Fig.13. Fixing bracket and guide wheel of profiling float
2.4 岸站控制中心
岸站控制中心主要由网络交换机、用户计算机和控制软件组成。控制软件通过网络交换机连接互联网, 实时接收铱卫星网关数据, 将数据解析后获得实时温盐剖面数据。控制软件主要包含主操作界面、参数设置、浮标态势显示、数据处理等界面。
控制软件将铱星数据进行解码、显示, 并实时绘制温盐深曲线、浮标漂移轨迹, 自动生成每个剖面的数据文件, 存放在本地计算机, 文件名为“通信IMEI号码_剖面序号”的.txt文件, 方便用户调用。
3 水池及湖上试验
为适应极区和海冰应用环境, 先后对冰下温盐剖面实时观测系统进行了水池以及湖上试验, 并对系统布放流程、水下耦合通信测试、冰下剖面浮标剖面循环、冰面通信等进行重点验证。
2018年6月15日, 在室内水池进行了首次水池试验(图14), 进行了20个剖面的工作测试, 冰下剖面浮标上浮下潜功能正常, 水下耦合通信正常, 剖面数据传输正常, 并初步积累了系统布放流程经验。

图14 水池试验
Fig.14. Pool test
2018年7月4日—7月10日, 在湖北省巴东县水布垭试验基地进行湖上试验(图15), 对冰下剖面浮标剖面循环、冰面通信功能进行了充分验证。湖上试验完成了布放演练, 进一步完善系统布放流程。湖上试验过程中进行了15个剖面的工作测试, 冰下剖面浮标工作正常, 水下耦合通信正常, 系统能够与岸站控制中心通过铱星通信系统进行双向通信, 剖面数据传输正常, 系统运行稳定。
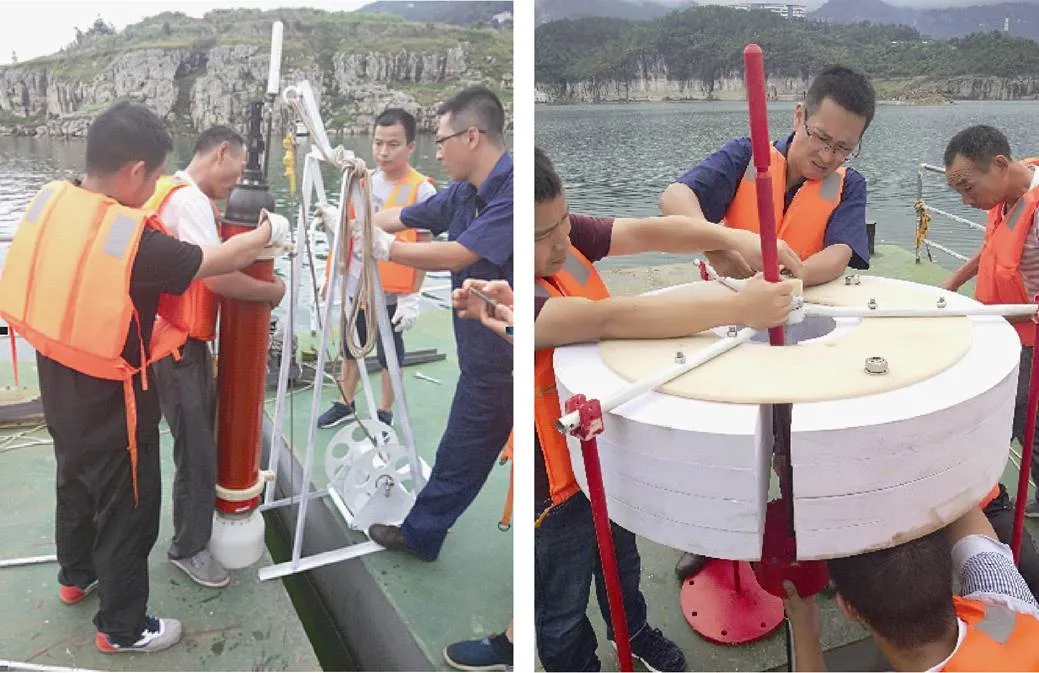
图15 湖上试验
Fig.15. Lake test
4 极区布放与应用
4.1 极区布放
本系统于2018年8月18日在中国第9次北极科学考察任务中搭载“雪龙”号顺利完成布放, 布放于167°11′41″W, 84°09′15″N。由于极区环境恶劣, 为了减少布放时人员的劳动强度, 现场采用工装辅助布放(图16)。
布放的方法和步骤如下:
1)布放锚块和钢缆: 用专用工具在冰上开一个直径为300 mm的孔, 固定绞车(布放辅助工装), 连接锚块, 逐一布放锚块和包塑钢缆;
2)剖面浮标通电测试: 通过绞车逐一放钢缆至上挡块处, 放缆停止; 取出剖面浮标, 按照步骤开电, 用测试工装测试剖面浮标工作状态正常后, 直立剖面浮标, 安装浮标上的固定支架, 确认安装无误后, 将浮标沿包塑钢缆从冰洞中逐渐缓慢滑于水中;
3)钢管连接固定: 将钢管穿过三脚架, 安装转环在钢管上, 将钢缆接头安装在转换上, 检查确认; 将冰面通信舱固定安装在钢管上;
4)安装冰面浮体: 将冰面浮体缺口位置穿过钢管, 对准尼龙板上的连接螺栓位置, 将连接螺栓固定, 确认螺栓旋紧固定。将冰面浮体放置于冰面, 设备布放完成。
布放过程提前演练, 实际在北极浮冰上进行布放时, 布放较顺利, 设备工作正常。

图16 系统在北极布放
Fig.16. System deployed in the Arctic
4.2 实际应用
2018年8月18日—2019年1月18日, 本系统持续工作153天, 获得104个剖面数据。根据使用要求, 最大采样深度为210 m, 按照深度间隔每剖面共100个采样点。在布放初期, 系统观测频率设定为6小时/剖面, 运行稳定后系统将观测频率改为5、10天/剖面。系统完成104个剖面, 剖面位置信息、剖面盐度数据传输正常, 满足70个剖面的指标要求, 工作寿命符合预期。首次在极地实际应用, 虽然本系统能够满足基本观测要求, 但其性能和使用寿命等还是不及欧美国家的产品, 尤其在稳定性、可靠性和布放流程等方面需要改进。例如布放后, 剖面仪上传的温度剖面数据为0, 温度数据缺失, 导致系统观测数据仅有盐度剖面数据。经过对剖面仪的各组成部分和接口协议的分析, 发现冰下剖面浮标对0度以下的温度数据进行压缩编码时, 软件处理存在缺陷, 温度编码函数返回值为0, 进而导致出现岸站解析温度数据为0的故障现象。项目组对问题充分分析, 进行了准确的故障定位, 并对故障进行复现; 制定纠正措施, 完善数据压缩编码, 解决了该问题。并在温度箱内进行了温度循环(–5~5℃)测试验证, 充分解决了该问题。
系统运行轨迹如图17所示, 图中红色菱形为系统布放点, 红色五角星为系统漂移终点。系统使用的CTD传感器为美国海鸟公司生产的SBE41型CTD传感器, 根据美国海鸟公司发布的SBE41型CTD传感器的参考指令集, 该型CTD传感器数据输出格式为工程格式, 包含温度、盐度和深度三种数据, 电导率数据并不对用户输出, 其盐度数据为传感器本身根据温度、深度、电导率计算得出。虽然温度数据由于系统软件问题出现缺失, 但传回的盐度数据为传感器原始数据, 因此对其所有盐度剖面数据进行分析, 对传感器工作状态判定具有一定意义, 尤其是分析CTD传感器是否存在漂移现象。将系统回传的104个盐度剖面数据绘制成盐度曲线簇进行分析(图18)。

图17 系统漂移轨迹
Fig.17. Drifting trajectory map
在极地布放时, 没有在布放点进行现场CTD观测以及水样采集, 同时由于温度数据的缺失也无法对温度和T-S曲线进行分析, 因此对该系统观测的盐度剖面数据无法进行有效比测。但从图18来看, 该系统本身测量的各个盐度剖面之间吻合程度较好, 没有出现明显的毛刺或异常数据。盐度愈往海面, 其离散越明显, 而在200 m深度反而出现一定的聚集趋势。图18呈现的0~200 m深度的盐度变化规律也符合海洋上层海水温盐特性, 越往海水表层, 越容易收到风、太阳辐射等外界因素影响。这也为该系统后续改进和实际应用敲响了警钟, 利用船载CTD仪、采水器和实验室盐度计进行现场比测, 以便于对系统观测数据进行真实、客观的质量评价。

图18 盐度剖面曲线簇
Fig.18. Salinity profile curves
5 结语
本文介绍了极区冰下温盐剖面实时观测系统的系统组成及主要模块设计。基于国产HM2000型剖面浮标进行改进设计, 增加冰面通信设备、锚系平台等设备, 组成温盐剖面实时观测系统。本系统的创新点在于突破感应耦合通信关键技术, 实现了水下非接触通信技术的自主可控; 创新性地将冰面通信控制单元作为冰面通信中继, 建立岸站控制中心—冰面通信控制单元—冰下剖面浮标的双向通信链路, 实现了极区浮冰下0~200 m深度范围的温盐剖面实时观测。
本系统于2018年8月18日在中国第9次北极科学考察任务中顺利完成布放。本系统首次在极地实际应用, 虽然能够满足基本观测要求, 但其性能和使用寿命等还是不及欧美国家的产品, 尤其在稳定性、可靠性和布放流程等方面需要改进, 力争早日填补我国自主研发的极区冰下海洋测量装备产品化的空白, 使我国冰下海洋观测迈上新台阶。
1 张文良, 商红梅, 贾立双.极区冰水界面探测系统[J]. 海洋技术, 2013, 32(4): 33-35.
2 许建平, 刘增宏. 中国Argo大洋观测网试验[M]. 北京: 气象出版社, 2007: 1-6.
3 许建平, 刘增宏, 孙朝辉, 等. 全球Argo实时海洋观测网全面建成[J]. 海洋技术, 2008, 27(1): 68-70.
4 袁凯琪. 极地海冰浮标监测系统的设计及应用研究[D]. 太原: 太原理工大学, 2015.
5 李智刚, 张艾群, 俞建成. 水下机器人在极地科学考察中的应用[J]. 极地研究, 2004, 16(2): 135-144.
6 方贺, 谢涛, 杜路遥, 等. 一种用于观测北极海冰侧边界融化的水下超声波测距系统[J]. 仪表技术与传感器, 2018(9): 45-50.
7 章恒, 窦银科, 马春燕, 等. 极地多点低温低功耗高精度柔性温度链的设计[J]. 传感技术学报, 2019, 32(5) : 681-687.
8 胡圣鹰, 窦银科, 马春燕, 等. 基于Iridium 9602的北极海冰综合监测系统的设计与应用[J]. 现代电子技术, 2018, 41(20): 127-131.
9 中国Argo实时资料中心. 我国在北太平洋西边界流海域布放首批北斗剖面浮标[EB/OL]. (2009-04-22). http://www.argo.org.cn.
DESIGN AND APPLICATION OF A REAL-TIME TEMPERATURE AND SALINITY PROFILE OBSERVATION SYSTEM UNDER ICE FOR POLAR REGIONS
Wang Deliang, Zhang Suwei
(Yichang Testing Technique Research Institute, Yichang 443003, China)
The observation of temperature and salinity profiles under ice is an important aspect of polar marine environmental monitoring. The large number of ice floes is the main feature of the polar ocean environment. Conventional ocean observation equipment such as Argo buoys and underwater gliders cannot fixed positions and transfer satellite observations under the ice, which is also the main reason for the relative scarcity of temperature and salinity profile data and space–time discontinuity in the polar regions. To observe temperature and salinity profiles in the depth range of 0–200 m under the ice, we developed a real-time observation system based on the domestic HM2000 profiling buoy, which integrated the ice surface communication equipment and anchor platform. A breakthrough was achieved in the key technology of inductive coupling communication, and a two-way communication link between the shore station and profile buoy was established. In August 2018, the system was successfully deployed and applied in the ninth Arctic scientific expedition of China.
polar region, Argoprofiling buoy, HM2000 profiling buoy, real-time observation
2019年12月收到来稿, 2020年5月收到修改稿
王德亮, 男, 1983年生。高级工程师, 主要从事海洋工程装备、测控技术研究。E-mail: wdl710103@126.com
10. 13679/j.jdyj.20190073
