航姿系统航向精度高纬度评价方法与试验
2021-01-14郭正东奔粤阳崔文婷
郭正东 奔粤阳 崔文婷
研究论文
航姿系统航向精度高纬度评价方法与试验
郭正东1奔粤阳2崔文婷2
(1海军潜艇学院, 山东 青岛 266199;2哈尔滨工程大学, 黑龙江 哈尔滨 150001)
针对传统惯性航姿系统高纬度地区不能提供可靠航向参考的问题, 将基于横坐标系的机械编排技术方案应用于航姿系统的姿态解算。针对高纬度应用需求, 提出了航向精度指标的相对评价法, 消除了纬度变化对于误差变化的影响。设计高纬度导航性能航行搭载测试试验方案, 并完成了极地科考航行试验, 结果表明采用横向机械编排的光纤航姿设备可作为高纬度地区的姿态参考系统。
航姿系统 高纬度导航 评价方法 横向机械编排
0 引言
近年来, 全球变暖导致北极地区冰盖融化, 使得北极航道航运价值凸显[1], 北冰洋地区的油气资源开发利用成为可能[2-4]。北冰洋的战略地位重要, 世界各国针对北冰洋的空间和资源争夺日趋激烈。可以预见, 越来越多的船舶将会进入北极, 开展商业航行、科学考察、海上采油等活动。
众所周知, 导航是保障海上活动的前提。不管是平台式惯性导航系统, 还是激光或光纤惯性导航系统, 采用现有常规机械编排, 其在高纬度工作时存在精度下降、定向困难、计算溢出等问题[5-7], 直接影响到船舶的操纵指挥和控制系统, 进而影响海上的航行安全和作业。
针对上述问题, 本文拟基于横向编排的光纤航姿系统, 研究高纬度条件下的航向精度评价方法, 通过航行搭载的方式开展测试, 以检验方法的科学性, 以期为其他工程应用提供参考。
1 光纤航姿系统的横向机械编排
针对航姿系统常规机械编排在高纬度地区存在的一系列问题, 本文拟根据航行纬度的不同在两种导航方案中进行切换, 即: 航行在高纬度地区时选择横坐标捷联航姿系统机械编排[8-9], 而航行在中低纬度时仍采用常规地理坐标系下的机械编排, 利用地理坐标系统和横坐标系统之间的转换关系, 从而实现捷联航姿系统在高、低纬的自由切换[10-11]。
1.1 横坐标系建立过程
图1 横坐标系定义
Fig.1. Transversal coordinate system



1.2 航姿系统的姿态解算

姿态角速率为

由于四元数计算简便, 不需要像方向余弦法那样求解9个未知量的线性方程组, 只需求解四个微分方程, 并且不需要参与计算三角函数运算, 只是涉及加减法与乘法运算, 硬件消耗资源低, 使得其算法在微处理器上运行有优势, 因而在工程上被广泛使用。
姿态四元数的微分方程可以表示为:

1.3 高纬度姿态转换



综上所述, 可以在机械编排切换时实现姿态信息在两种坐标系统之间的自由转换, 实现将航姿系统在高纬度的姿态信息转换到地理坐标系下的姿态, 可供导航使用。
2 航姿系统精度评定方法
航姿系统指向精度已有成熟的评价方法, 大都是基于数值结果的绝对评价。为了消除纬度对评价结果的影响, 精度考核往往根据测试纬度不同, 按照一定纬度差来分段进行。在高纬度环境条件下, 纬度的微小变化, 在地理坐标系下的航向值会有明显改变。
2.1 航向精度指标的绝对评价法
现有航姿系统给出的航向精度指标通常与纬度的余弦值成反比, 其表示的是航姿系统在本地的指向误差大小。因此, 随着纬度的升高, 航向精度会逐步降低。当舰船由低纬度航行至高纬度地区时, 航向精度指标将逐步增大, 理论关系如下:


综上, 若采用航向精度指标的绝对评价法, 在高纬度条件下无法对航姿设备进行科学评价。
2.2 航向精度指标的相对评价法


通过该百分比的比值大小, 可对航向精度进行有效的评估。航向精度百分比小于100%时, 符合原精度指标要求, 否则超差。
3 试验与分析
2018年7月20日—9月26日, 哈尔滨工程大学在我国第九次北极科学考察中, 对光纤航姿系统开展了航行搭载试验, 试验最高纬度为84.8°N。
3.1 试验数据分析方法
为了研究问题方便, 暂以纬度70°进行区分, 根据雪龙船航迹, 可将航向精度比对试验划分为3个阶段: 第一阶段为从低纬度至高纬度航渡, 第二阶段是高纬度比对测试阶段, 第三阶段是高纬度至低纬度航渡。每一阶段中, 以高精度惯性导航系统的姿态信息为参照, 采用相对评价法给出当地水平固定指北常规机械编排方法(以下称常规方法)和横向机械编排方法(以下称本文方法)的航向比对结果。
3.2 试验结果
第一阶段试验起止时间为第九次北极科考开始至第250小时, 雪龙船由上海航行至70°N附近, 历时10余天。采用相对评价法分别对常规机械编排方法(常规方法)和横向机械编排方法(本文方法)进行评价, 并给出基于这两种不同机械编排的航向比对结果, 如图2所示。
图2的上图为雪龙船航迹, 纬度从30°至70°左右变化。图2的下图为常规方法、本文方法给出的光纤航姿系统的航向误差比对结果。不难看出: 其一, 在纬度70°以下, 两种方法几乎看不出差别; 其二, 相对评价方法数值大都囿于25%以内, 且数值不存在大于1的情况, 表明该航姿系统的指向精度优于设计指标。
第二阶段为第250小时至第1 150小时, 雪龙船航行在高纬度地区, 纬度最高时达84.8°。采用相同的处理方法, 不难得到航向比对结果如图3所示。
从图3不难看出: 随着纬度升高, 两种方法的差异性开始显现, 尤其是在第700小时—第900小时的航行时间段, 纬度大于80°时, 采用常规方法的相对航向误差存在大于1的情况, 表明其性能低于设置指标值; 相比之下, 采用本文方法的相对航向误差都控制在50%以内, 表明其性能高于设置指标值。
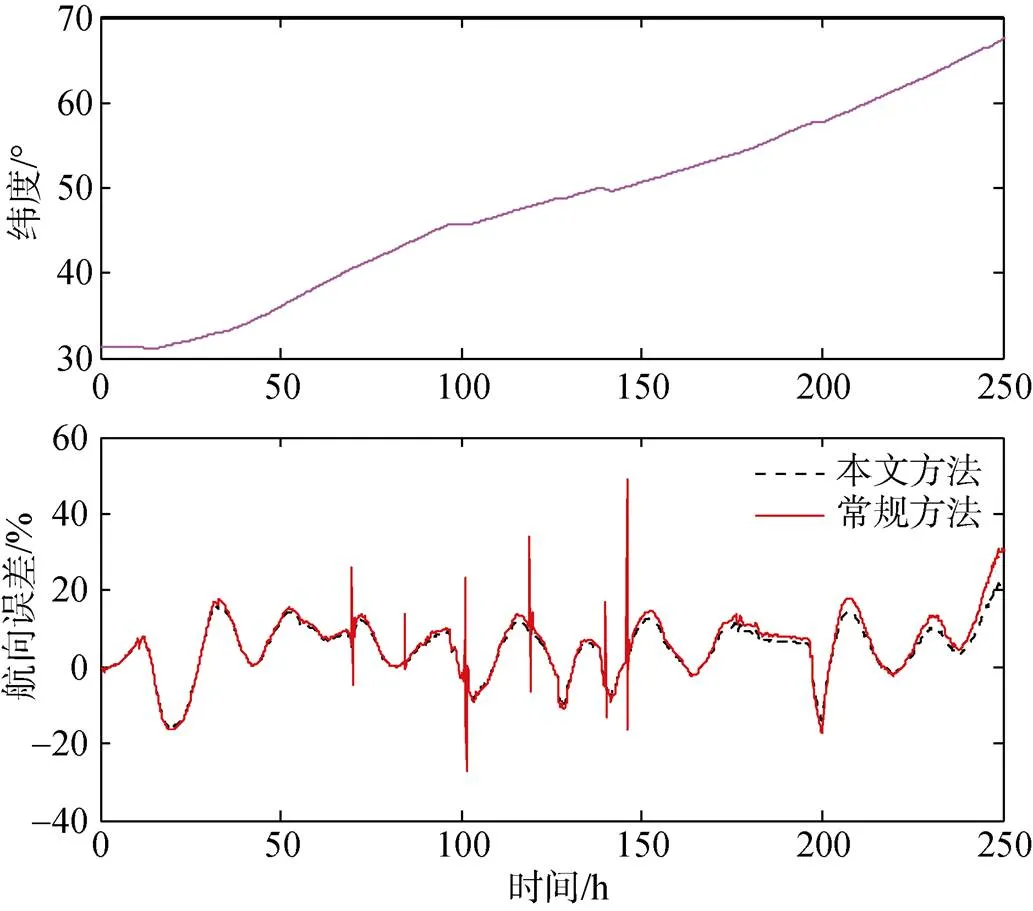
图2 第0—250小时航向精度比对结果
Fig.2. The heading accuracy from the 0th hour to 250th hour

图3 第250—1150小时航向精度比对结果
Fig.3. The heading accuracy from the 250th hour to 1 150th hour
第三阶段为第1 150小时—第1 700小时, 雪龙船由高纬度地区返回上海。采用前述方法, 获得航向比对结果如图4所示。将图4和图2进行比较, 可得出与第一阶段相同的试验结论, 此处不再讨论。
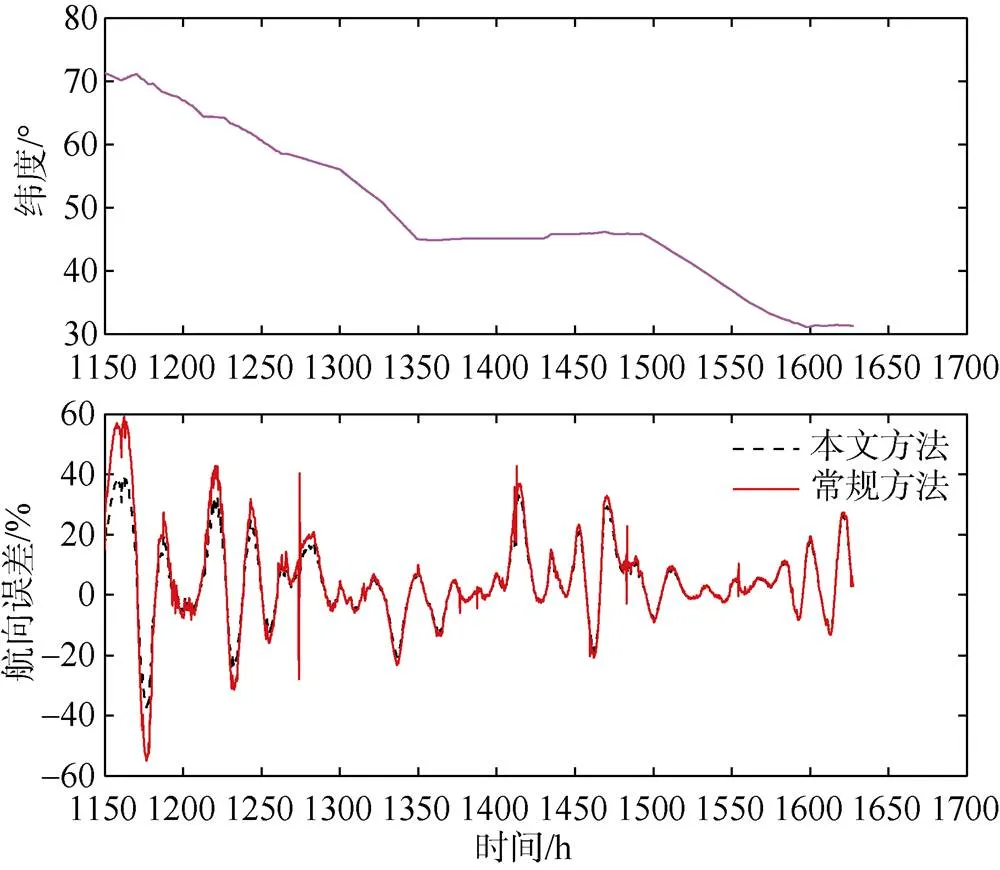
图4 1 150—1 700小时航向精度比对结果
Fig.4. The heading accuracy from the 1 150th hour to 1 700th hour
3.3 分析与讨论
为了更直观地呈现出两种方法的差异性, 采用最大值法, 将三个试验阶段中光纤航姿系统的航向精度比对结果列在表1中。

表1 航向精度比对表
可以看出: 在中低纬度地区, 即第1和第3阶段, 两种方法的航向精度比对结果优于55%, 均能满足设计要求。在高纬度地区, 即第2阶段, 采用常规方法的光纤航姿系统会出现航向精度超差问题, 误差最大值达142%, 表明其已不能满足设计要求。相比之下, 在试验全过程中, 采用横向机械编排方法光纤航姿系统的精度始终优于50%, 且从未出现航向精度超差问题, 可满足设计要求。
4 结论
本文设计了横向机械编排方法, 并将该方法应用于航姿系统的姿态解算中, 针对高纬度应用需求提出了航向精度指标的相对评价法, 消除了纬度变化对于误差评价的影响。极地科考航行试验结果表明: 采用本文姿态解算方法, 光纤航姿系统的航向精度比常规机械编排方法的精度提高了50%, 试验验证了该方法的有效性。
1 LYON W K. The navigation of arctic polar submarines[J]. Journal of Navigation, 1984, 37(2): 155-179.
2 王有隆. 北极地区飞行中的通信与导航特性[J]. 航空维修与工程, 2006(1): 46-48.
3 白春江, 李志华. 北极航线探讨[J]. 航海技术, 2009(5): 7-9.
4 王军, 李保平. 北极导航条件分析及对策[J]. 科技信息,2012: 126.
5 周琪, 秦永元, 付强文, 等. 极区飞行格网惯性导航算法原理[J]. 西北工业大学学报, 2013, 31(2): 210-217.
6 吴枫, 秦永元, 周琪. 机载武器极区传递对准算法[J]. 中国惯性技术学报, 2013, 21(2): 141-146.
7 周琪, 秦永元, 严恭敏, 等. 大飞机极区惯性/天文组合导航算法[J]. 系统工程与电子技术, 2013, 35(12): 2559-2565.
8 豆嫚. 基于横向坐标系的极区惯性导航方法研究[D]. 南京: 东南大学, 2014.
9 徐晓苏, 豆嫚.基于横向地理坐标系的极区惯性导航方研究[J]. 华中科技大学学报: 自然科学版, 2014, 42(12): 116-121.
10 WATLAND D R. Orthogonal polar coordinate system to accommodate polar navigation: 5448486[P]. 1993-04-29.
11 FOX W A W. Transverse navigation: An alternative to the grid system[J]. Journal of Navigation, 1949, 2(1): 25-35.
12 秦永元. 惯性导航[M]. 第2版. 北京: 科学出版社, 2014.
13 DYER G C. Polar navigation: A new transverse Mercator technique[J]. Journal of Navigation, 1971, 24(4): 484-495.
14 李倩, 孙枫, 奔粤阳, 等. 基于横坐标系的捷联惯导系统极区导航方法[J]. 中国惯性技术学报, 2014, 22(3): 288-295.
15 李倩. 横坐标系捷联惯导系统极区导航及其误差抑制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2014.
Accuracy Evaluation and Testing of an AHRS in High-Latitude Areas
Guo Zhengdong1, Ben Yueyang2, Cui Wenting2
(1Navy Submarine Academy, Qingdao 266199, China;2College of Automation, Harbin Engineering University, Harbin 150001, China)
The traditional attitude and heading reference system (AHRS) cannot provide reliable heading data in high-latitude areas. To address this problem, mechanization based on transverse coordinates for an AHRS is proposed for attitude and heading calculations. In terms of the requirements of accuracy evaluations in-high latitude areas, the relative specification evaluation method was employed to remove the adverse effect of latitude variance. Moreover, a scenario of a sailing trial for high-latitude navigation was designed, and a corresponding polar trial was carried out. The trial results showed that a fiber-optic gyro-compass using mechanization based on transverse coordinates could serve as a reliable AHRS in high-latitude areas.
AHRS, polar navigation, evaluation method, transverse coordinate mechanization
2020年3月收到来稿, 2020年4月收到修改稿
国家自然科学基金(51979047)、国防基础科研计划项目(JCKY2019604D003)、工信部高技术船舶项目(MC-201919-C11)资助
郭正东, 男, 1977年生。博士研究生, 主要从事水下导航研究。E-mail: g_zh_d@aliyun.com
10. 13679/j.jdyj.20200029
