大深度剖面式潜水器浮力驱动系统研究
2021-01-14杨小辉曹军军李戴维
杨小辉,曹军军,李戴维,连 琏
(1.中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003;2.上海交通大学,上海 200240)
近年来,自持式剖面浮标[1](Argo)和水下滑翔机[2](Glider)的发展速度较快,在海洋观测方面展现了巨大的优势[3],两种观测平台成为科学家观测记录海洋数据的重要测量工具,为我国海洋科学的发展做出了巨大的贡献[4-5]。浮力驱动系统是上述两种潜水器的动力系统,通过调节潜水器的排水体积增大/减小来实现载体平台的上浮/下潜,由于其工作原理简单和相对能耗低的特点,也被广泛的应用于其它各类潜水器,如自主式无人潜水器(AUV)、两栖无人潜水器(ASUV)和遥控潜水器(ROV)等[6-7]。高压浮力驱动系统是大深度剖面式潜水器的关键动力系统。浮力驱动系统的性能和潜水器的整体性能间有着密切的关系,浮力系统的调节体积大小、体积调节精度和能耗等性能影响着潜水器的下潜深度、定深精度和续航能力等[8]。浮力系统的性能在一定程度上制约着我国潜水器的发展,对高压浮力驱动系统的研究,有利于提高我国大深度剖面式潜水器的性能,为潜水器的进一步发展奠定基础。
1 浮力驱动系统研究应用现状
浮力系统主要有气动和液动两种形式。气动系统具有可调节体积大和调节速度快的优点,但由于压力小和压力不稳定的特点,其主要应用在浅水水域[9]。液压系统调节压力大和调节速度稳定的特点使其能够用于大深度的潜水器[10],目前绝大多数大深度剖面式潜水器均采用液压型的浮力驱动系统。
浮力驱动系统在潜水器中的应用开始于Argo浮标,其是建立全球海洋观测网的一种专用测量设备,如APEX、PLACE、ALACE、SOLO 和C-ARGO等剖面浮标[11-13]。它们均使用单冲程柱塞泵系统来调节载体平台的排水体积。单柱塞泵系统在小型系统中使用时占用体积较大、浮力可调节量较小,其负载也相对较小,但其流量大、效率高,适合在较浅深度工作的潜水器,目前一般用于Argo 浮标系统中,浮力调节量约为500 mL,在Argo 快到达水面时使用艉部的气泵给气囊充气来实现Argo 在水面的通信高度。
为了增大浮力驱动系统的调节体积,改善载体平台适应海水密度和搭载传感器的能力,法国研制了POVOR 浮标。该浮标采用微型高压柱塞泵代替了传统的单冲程柱塞泵。相对于单柱塞泵系统,微型柱塞泵系统流量较小,但其负载能力大、体积小,便于模块化设计,适合在较大深度工作的潜水器,能够提供较高的工作效率以及较大的浮力调节量。此种浮力驱动系统的研发,使得其在其它小型潜水器上的应用成为可能,如水下滑翔机(Glider)和自主式无人潜水器(AUV)等。
比较有代表性的3 种水下滑翔机, 如Seaglider[14]、Spray[15]和Slocum[16],均使用微型柱塞泵的高压浮力驱动系统,都具有大深度、大排量的工作特点。再到后来的Deep-glider、Under-DOG、“海翼-7000”和“海燕-10000”等大深度水下滑翔机都使用微型高压柱塞泵的浮力驱动系统。该类高压浮力驱动系统的研制是大深度剖面潜水器发展的关键所在,同样也是潜水器发展的瓶颈。
从最初的单冲程柱塞泵系统到现在的微型高压柱塞泵[2]系统,根据潜水器的作业任务不同浮力驱动系统也不尽相同,总的来说,浮力驱动系统有了很大的改善,其占用的体积更小、调节的体积更大和工作更稳定等。但随着科学的发展,科学家的观测需求逐渐提高,要求潜水器能够更深、更长、更精确和更综合地对目标海域进行观测[17]。这就要求浮力驱动系统具有足够大的调节体积,高精度的油量控制性能和较低的能耗,综合来看,目前的浮力系统很难同时达到上述3 个条件。针对上述问题,本文对高压浮力驱动系统展开研究,详细阐述了浮力驱动系统各项参数与潜水器整体性能之间的关系,并介绍了浮力系统参数设计的详细过程。
2 剖面式潜水器浮力驱动系统设计
2. 1 剖面式潜水器结构组成
剖面式潜水器由于其结构简单、成本低和续航能力较大的优点,近年来得到了快速的发展,Argo和水下滑翔机是两种最具代表性的剖面式潜水器。该类潜水器的系统组成较为固定,图1 为上海交通大学设计的大深度观测平台—机动浮标[18-19],其耐压壳体使用高强重比的复合碳纤维材料制成,共分为上、中、下3 段,头部和尾部使用钛合金球端盖密封,外部固定有高度计、导流罩、机翼和尾翼等。载体内部系统由前到后依次布置有浮力系统、能源系统、姿态系统、主控、通信模块、应急抛载系统和传感器等。浮力驱动系统布置在载体最前端,在方便外部油囊装配的同时起到调节载体俯仰姿态的目的;姿态系统将俯仰调节和横滚调节合并在一起,使得系统结构紧凑,空间利用率高。

图1 大深度剖面式潜水器系统基本组成
2. 2 浮力驱动系统工作原理
大深度剖面式潜水器由于其下潜深度大、可利用空间小以及系统体积调节量较大等特点,采用微型柱塞泵浮力驱动系统,能够较好地满足使用需求。考虑到功耗问题,浮力驱动系统采用开阀回油的方式进行吸油使载体下潜,在水下利用活塞泵排油的方式使载体上浮,同时考虑到重量的限制,浮力驱动系统采用无蓄能器设计。浮力驱动系统主要由控制模块、驱动模块和液压模块组成,控制模块与机动浮标主体通信,并控制驱动模块驱动液压模块工作,通过调节外部油囊的体积来调节机动浮标总的排水体积。驱动模块用于驱动液压模块的执行元件按控制模块的要求动作,实现浮力系统的泵油和回油使得外部油囊的体积增大和减小,并进行限流保护,避免元件损坏。
浮力驱动系统原理图如图2 所示,系统主要包含内油箱(含活塞、滤网)、高压油泵(含驱动电机)、高压零泄露电磁阀、自研自保持机械阀、单向阀、外油囊、压力传感器、拉线传感器和气泵系统等,图3 为浮力驱动系统的实物图。结合剖面式潜水器的工作状态,浮力驱动系统要求具有3 种典型工作模式,对应图中3 条油路,分别为水面低压回油、水下高压回油和水下高压泵油:
我国的经济正在进入深化改革的阶段,社会资源的供需矛盾正在加剧。最明显的问题就是社会利益分配不均。由于法律制度存在滞后性,而我国的发展速度非常快,造成了法律法规的建设无法跟上社会的发展速度。普遍存在的问题是对权利的监督不完善,导致社会不公平的问题较多,影响青少年价值观的形成。需要加快社会保障制度的完善,提高法律法规的规范化,做到有法可依和有法必依。

图2 浮力驱动系统原理图

图3 浮力驱动系统实物图
(1)水面低压回油:当潜水器漂浮在水面或100 m 以浅的水深中需要下潜时,液压油在油囊外部水压的情况下,从外部油囊通过图2 中最左边的油路,经过自研自保持机械阀流入内部油箱中,减小载体的浮力开始下潜。由于开阀的过程很短、电流很小,其对电能的消耗很小,可忽略不计;
(2)水下高压回油:当潜水器在100 m 以深的水深中需要下潜时,液压油在油囊外部水压的情况下,从外部油囊通过图2 中中间的油路,经过零泄露电磁阀流入内部油箱中,从而减小载体的浮力使载体进一步下潜。此时油囊外部的压力较大,液压油的流量大,开阀时间短,回油能耗较小;
(3)水下高压泵油:当潜水器在水下需要上浮时,载体内部油箱中的液压油通过图2 中最右边的油路,经过高压油泵进入外部油囊中,增大载体的浮力开始上浮。高压泵油的流量较小,时间较长,是浮力驱动系统的主要能耗单元,同时浮力系统也是载体的主要能耗单元。
为了使浮力驱动系统稳定可靠的运行,在油箱中安装有滤网,确保液压油中的杂质不会进入油泵;在油箱中安装位移传感器,测量油箱活塞的运动距离计算油量的变化,精度较高且无零漂;在油箱中加装气泵系统,使回油时油箱内产生负压,泵油时油箱内产生正压(使液压油能够顺畅的进入油泵,消除负压对柱塞泵的影响),增加浮力驱动系统油量调节时的流畅性以及延长系统的寿命;油箱中还装有机械限位,保证系统的极限调节量,防止浮力驱动系统单元出错损坏零部件。
2. 3 浮力驱动系统关键参数选择
浮力调节量是浮力调节系统的重要参数指标,为了能够较为准确的确定浮力调节的可调节体积,随载体下潜深度的增大而使浮力产生改变的因素都需进行考虑,主要包括海水密度变化对浮力的影响,载体耐压壳体的体积压缩率对浮力的影响以及在海水表面通讯需求的浮力量。
定义机动浮标的总质量为Mw(常量,不随环境变化而变化);H为载体的工作深度,最大下潜深度为Hm;随着深度的增大海水密度和机动浮标的体积分别表示为ρ(H)和V(H)。
通常情况下,潜水器在海水表面时都具有一定的正浮力,使通讯天线露出水面一定的高度保证卫星通讯正常。根据阿基米德原理,对在海水中悬浮(静止)的潜水器进行分析可得公式(1)的平衡方程。

2. 4 浮力驱动系统核心部件选型
浮力驱动系统采用高压油管连接外部油囊和内部高压不锈钢接头,系统内部通过多头不锈钢接头实现油路连接,此种方法占用体积小、重量轻便于设计,如图4 所示为高压浮力驱动系统的集成模块。大扭矩电机通过柔性联轴器与微型高压柱塞泵相连,降低了装配时同轴度的需求,便于安装,油泵通过单向阀,经过三通接头与外油囊相连。外油囊另外两个与舱内器件连接的油路分别为零泄漏阀、自研自保持机械阀,均采用精密器件,保证系统能够稳定可靠运行。
图4 中的高压浮力驱动系统模块在潜水器内部的直径为238 mm,高度为425 mm,可调节体积达3.8 L,调节精度为2 ~20mL(根据工作状态不同,精度不同),最大工作压力可达50 MPa。

图4 高压浮力驱动系统集成模块
3 浮力驱动系统关键技术
3. 1 自研自保持机械阀组设计
文中浮力驱动系统引入了自研自保持机械阀组,与传统的电机油泵回油系统相比,大大减小了潜水器在下潜过程中的能耗,可以增大潜水器的续航力。
图5 为自研自保持机械阀组设计图,主要由减速电机、电机固定架、联轴器、上行程开关、螺旋轴、下行程开关、固定螺母、抗挤出密封圈、阀体等组成。关阀时,启动电机正转,带动螺旋轴旋转,同时向下运动,直到行程开关档块触碰到下行程开关,此时,螺旋轴已进入抗挤压密封圈,切断进油口到回油口的油路,阀组关闭,如图5左所示;开阀时,启动电机反转,带动螺旋轴旋转,同时向上运动,直到行程开关档块触碰到上行程开关,此时,螺旋轴已退出抗挤压密封圈,开启进油口到回油口的油路,阀组开启,如图5 右所示。由于开阀和关阀的过程很短、电流很小,其对电能的消耗很小,可忽略不计。
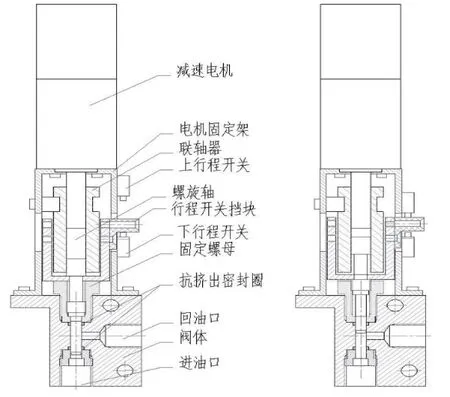
图5 自研自保持机械阀组设计图
3. 2 高精度油量测量和控制系统设计
目前浮力驱动系统油量调节的测量方法主要有增量式体积测量和绝对式体积测量两种方法。增量式方法即为在舱内油箱出油端或在外部油囊进油端加装流量传感器,如图2 中所示,但当流量传感器排油和回油的次数较多后,会出现累积误差,很难保证稳定长期的油量测量;绝对式方法目前较为常用,其原理即为通过测量固定容积体积的变化量得到体积的变化量,没有累积误差,测量稳定可靠,其可以通过精度较高的位移传感器测量内部油箱或外部油囊的长度变化来得到油量的精确变化。
如图2 所示,在油箱内部的活塞上加装有高精度的位移传感器,通过测量活塞的位移量来反推外部油囊的体积大小,从而得到潜水器的浮力大小。当潜水器上浮时,由于泵油速率一定,约为45 mL/min,此时油量调节精度高,约为2 mL;当潜水器在水面下潜时(H<100 m),此时自研自保持机械阀组开启,其流量较小,约为60 mL/min,油量调节精度约为10 mL;当潜水器在水下下潜时(H>100 m),零泄漏电磁阀开启,为减小能耗,其流量较大,约为400 mL/min,通过控制系统调节,添加提前关阀等措施,油量调节精度约为20 mL。
4 浮力驱动系统性能测试
浮力驱动系统是剖面式潜水器的驱动系统,浮力驱动系统工作的稳定性和可靠性直接影响着潜水器的安全性;同时,浮力驱动系统也是载体平台的能耗大户,其消耗的总能源约占据平台携带总能源的40%;浮力驱动系统的调节速率对平台的下潜上浮速率产生直接的影响,也间接的影响了平台的滑翔性能。因此,对浮力系统的调节速率和相应的能耗进行测试和计算显得尤为重要。
通过上述介绍,文中的潜水器在下潜的过程中,浮力系统的能耗较小,可忽略不计。浮力系统的能耗主要集中在向外泵油的过程中,即水下高压泵油过程,浮力系统将内部油箱内的液压油通过电机和油泵泵向外部油囊,克服油囊外部的高压环境。浮力系统高压泵油的工作效率可通过公式(2)计算得到。

式中:Q是浮力调节系统外油囊外部压力为P时液压油的流量;U和I为相应情况下的电压和电流。
表1 展示了3 套相同的浮力驱动系统在不同外压作用下的泵油性能,表中的效率为相应压力下的平均效率,由于浮力系统接入的电压基本不变,使得电机的转速保持不变,进而油泵的泵油速率在不同压力下基本保持不变,约为0.66 ~0.69 mL/s,由于选择的油泵为60 MPa 高压油泵,其最优工作峰值点在高压40 MPa 左右,所以表格中的平均泵油效率随着油管内压力的增高而逐渐变大,同时,也可以得出浮力系统在水面进行泵油操作时效率最低,约为10%。图6 展示了3 套浮力系统在不同外压下的电压电流拟合曲线,从图中的拟合曲线可以看出,在电机两端电压一定的情况下,随着油管内部压力(通过调节溢流阀来调整油管内压力的大小)的增大,电机相应需要的电流也逐渐增大,两者为正比例线性关系。

图6 浮力系统电压电流测试曲线

表1 浮力调节系统性能测试对比
由于潜水器需要长时间漂浮在2 000 m 甚至更深的海水中,且2 000 m 以下的海水温度约为2 ~4℃,因此还需要测试浮力调节系统的高压零泄漏和低温高压泵油性能,具体实验过程如图7和图8 所示。图7 中,将浮力系统连接外皮囊的油管转接打压设备,关闭机械小阀和零泄漏阀,将油管内的压力加压至46 MPa,经过24 h 后,观察打压设备压力表示数和浮力系统内部油量传感器参数是否变化,若都没有明显变化则可判断浮力调节系统具有高压零泄漏的性能。

图7 浮力系统耐压保压测试
图8 中将盛液压油的外部容器浸没在0℃的环境中,液压油经过12 h 的降温后,启动浮力驱动系统吸油功能,将冷却的液压油吸入内部油箱,然后在出油口添加溢流阀,再启动浮力系统的泵油功能,观察泵油功能是否正常,并测试液压油为零度时的高压泵油速率,得到浮力调节系统低温下高压泵油正常,且泵油速率约为0.68 mL/s,基本保持不变,判断系统具有低温高压泵油的性能。

图8 浮力系统低温高压泵油测试
通过实验测试结果,得到浮力驱动系统在水下工作的效率约为50%,稍高于目前浮力系统普遍的42%,具有低能耗的优势;通过保压和低温测试结果,表明系统能够在高压力和低温下稳定工作。结合上文中的大体积调节量和高精度油量调节技术,得到本文研制的高压浮力驱动系统基本具备大调节体积、高精度油量控制和较低能耗的性能,能够有效提高剖面式潜水器的相关性能。
5 结 论
本文以上海交通大学设计研制的剖面式潜水器—机动浮标为例,详细介绍了高压浮力驱动系统的工作原理,列出了浮力系统相关参数的计算方法,阐述了浮力系统研制过程中相关问题的解决方法,并给出了浮力系统关键技术解决方案等。通过研究与试验表明,本文研制的高压浮力驱动系统具有体积小、结构紧凑、重量轻、调节体积大、调节精度高和能耗低等优点。能够有效解决目前国内浮力驱动系统的不足之处,能够提高我国目前剖面式潜水器的负载、下潜深度、定深精度和续航能力等性能,推进我国大深度剖面式潜水器的发展。
