种植园巡检机器人结构设计
2021-01-14陈佳坪王妍玮谭庆吉邓佳玉
陈佳坪 ,王妍玮,,谭庆吉,邓佳玉
(1.黑龙江八一农垦大学 黑龙江,大庆 163316;2.哈尔滨石油学院 黑龙江,哈尔滨 150027;3.黑龙江农垦科技职业学院 黑龙江,哈尔滨 150431)
随着科学技术的发展,如今机器人技术的进步迅速,类别也逐渐增加,越来越多的农业巡检机器人应用于无人值守的农场中。设计一款种植园巡检机器人,主要其机器结构、驱动方式及3D建模。
1 结构方案选择
为在恶劣环境作业、夜间巡查、人到达不了的特殊地形进行代替人进行巡检,侦察等工作,由于工作时间长,实际地形复杂考虑到机器人的续航功能,决定采用球形结构进行巡检机器人设计,提出双轮球形结构的农业巡检机器人,适应农场作业寻走轨迹的多样化。
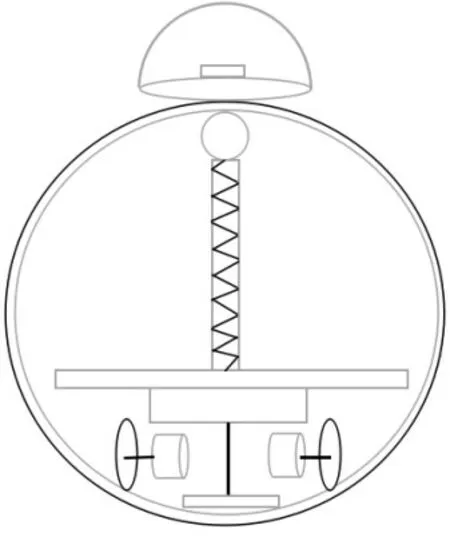
图1 双轮球形结构
它是将一个两轮驱动小车置于球体的内部,每个车轮独立驱动,驱动小车在球体内可以完成前进和转向两种运动。在设计上驱动小车的质量相对于球壳的质量越大越好,这样能减小驱动小车车轮与内球壳面间的相对滑动,且会使得驱动小车速度精良接近球心平移的速度。它的结构如图1 所示。双轮球形结构通过驱动板控制两个直流减速电机,电机经联轴器分别独立驱动左右两个车轮,车轮滚动与球体内侧发生摩擦,从而产生摩擦力,令球体内部的驱动装置重心发生偏移,令球体进行直线运动。直流减速电机安装在底盘,底盘正下方有配重块,正上方安装有支撑轴,支撑轴与球体之间有一个球体机构,支撑轴安装有弹簧,以保证支撑轴上的球体机构在运动时具有合适的接触力。这种结构具有结构简单,驱动效率高,制作方便等,且具有十分强大的运动能力。球壳内的驱动小车,质量只要相较于壳体较大可以很好地保证驱动小车轮子边缘与球壳接触,使得电机所产生的驱动转矩能很好地转换成与球体间的摩擦力,使得球壳转动。当驱动小车质量较大时,还可产生类似不倒翁般的效果,使得驱动小车在球壳的下部。
2 机械结构设计及选材
2.1 球体部分
设计的巡检机器人采用球体结构主要考虑以下两个因素:
①球体硬度,因为球体是本巡检机器人与外部接触的介质,为了不影响机器人的运动,球体材料的强度及硬度必须满足其滚动时需要的要求。在满足以上需要的前提下,球体的材料需要在运动时便于观察球内驱动装置状态。所以材料必须是透明的。
②材料加工的难易程度,这款巡检机器人是球形机器人的一种,所需材料要有合适的塑性。
经过挑选,有钢化玻璃及亚克力两类材料可提供选择。亚克力材料,成本高,耐磨,不易碎具有较高的表面硬度。在经济允许情况下,选择亚克力作为球体制造材料。
对于球体直径尺寸,通过研究,有三种:200mm,300mm和400mm,直径200mm的亚克力球,将导致内部驱动装置体积受限,内部电机提供不了充足的动力、400mm的亚克力球,由于3D 打印制作的零件所限制,会出现剩余空间较大,零件尺寸又较小的情况。因此选择直径300毫米的亚克力球作为外壳,这样就能能保证其内部空间适当并且能够安装型号较大的电机,从而使得巡检机器人得到充足的动力。还可以在3D制作零件时,可以制作出设计尺寸合适的零件。
所以,最后选择的球体材料数据如下:材料为亚克力,直径300mm,厚度5mm。
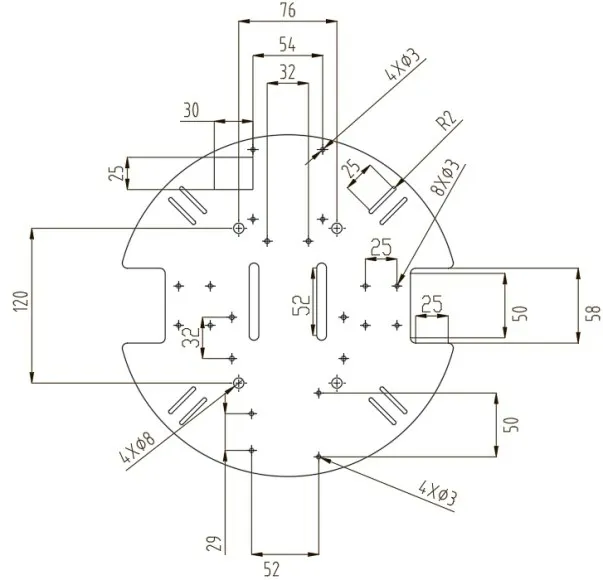
图2 底盘二维结构图
2.2 驱动小车部分
驱动小车部分是由底盘、电机法兰、牛眼轮法兰组成,具体设计如下所述。
①底盘设计。底盘设计考虑的是底盘能否有足够空间安装电机、驱动板和其他部件,以及它能否支承足够的重量[6]。设计选择了亚克力板作为底盘,因为亚克力板质量轻,韧性好,承重能力好,能承受足够的作用力。因为球体的直径为300mm,而底盘需要放置在球体中心以下的位置,以保证驱动小车在球体内时的重心在球体中心以下,而且因为驱动小车需要配重,保证驱动小车不会因为重量不足发生翻车的现象。所以设计时底盘的直径大小在250~270mm的范围内,厚度4mm,如图2所示。
②电机法兰设计。由于直流减速电机装配在底盘的时候需要法兰连接,令其锁定在底盘的底部。通过法兰连接不仅在固定电机有稳定的作用,而且电机转动时产生的作用力能由法兰承受,大大延长电机的使用寿命。电机法兰的制作是采用3D打印的方法,3D打印的优点是能随意塑型,且在配件硬度上也有一定的保证。材料使用PLA,PLA 是一种具有良好的抗拉强度和延展度的材料,能满足法兰的硬度要求。在3D打印法兰时材料成型密度调至50%。电机法兰的二维结构如图3 所示。电机法兰通过螺丝连接锁定在底盘的底部上,直流减速电机通过螺丝连接锁定在电机法兰上。因为装配空间限制,所以不能选用太大的螺丝,而201 材质的M3 螺丝在硬度不足以承受电机转动时的作用力,316 材质的M3 螺丝成本过高,最终选择304材质的M3螺丝连接使用。
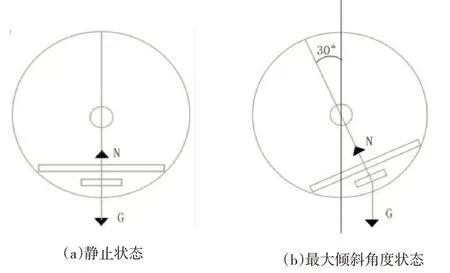
图3 配重板受力分析图
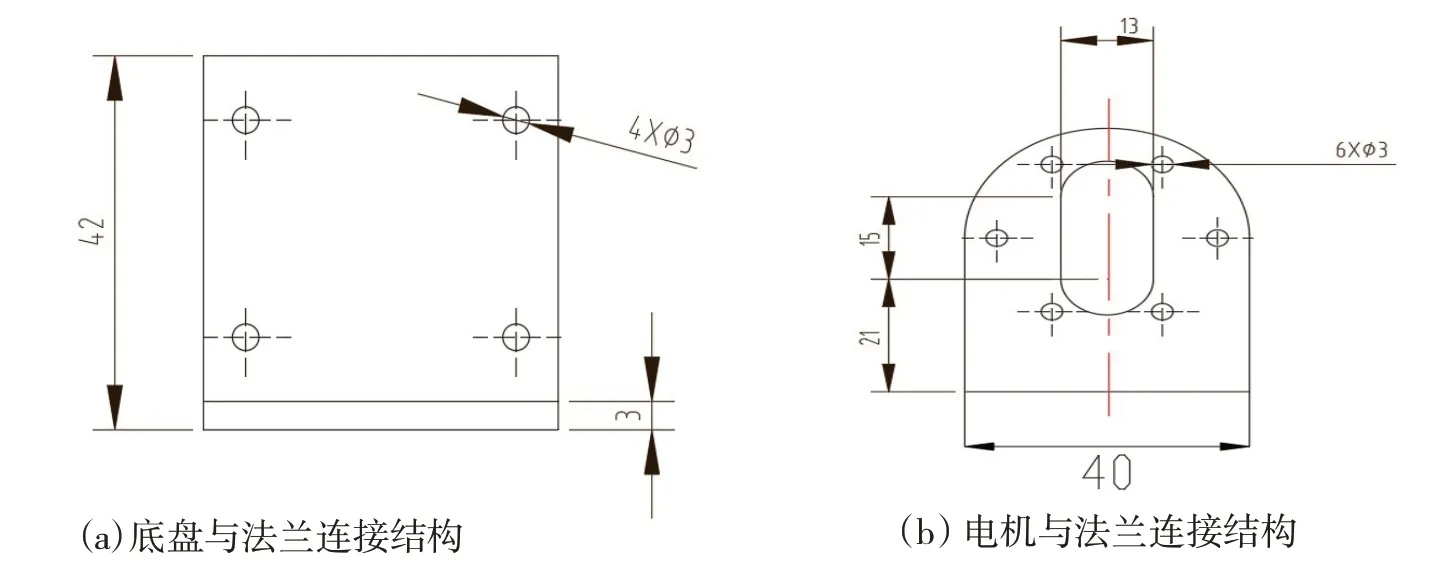
图3 电机法兰二维结构图
③牛眼轮法兰设计。牛眼轮通过法兰连接固定后,因为法兰与底盘连接位置为凹槽,能通过调整法兰的位置,达到车轮和牛眼轮与球体相切的要求。牛眼轮法兰的制作是采用3D 打印,材料为PLA,材料成型密度调至50%。牛眼轮法兰的二维结构如图4 所示。所用螺丝为不锈钢304 材质的M3 螺丝。在选择牛眼轮时,有普通牛眼轮和圆柱直筒牛眼轮,因为牛眼轮所起的作用是与球体相切,普通牛眼轮与球体相切位置调整困难,而圆柱直筒牛眼轮是圆柱状,调节与球体相切位置方便。所以最终选择圆柱直筒牛眼轮作为部件。其尺寸参数为M8 螺杆,长度35mm。
2.3 支撑轴设计部分
支撑轴是连接驱动小车部分和上层托板的重要部件,在设计的时候,令其能够调节长度。所以,它能控制上层托板到头部的距离,使得头部的磁铁和上层托板的磁铁能互相吸附。
2.4 配重部分
因为驱动小车需要时刻在球体的底部,但驱动小车的重量不足,容易浮空。所以设计一个配重的部分增加重量。配重部分的组成为配重放置板和配重物件。由于材料的限制,在选择配重物件的时候,最终利用哑铃1.5kg的增重板。而配重放置板的四角用M8 大小,长80mm 的螺丝固定在底盘的正下方;板的中间为凸出的圆柱体,能在组装的时候将哑铃增重板固定在板上方。
当最大倾斜角度是30°,用规格为1.5kg的哑铃增重板,受力分析如图3所示。
巡检机器人的总重量为3000g,当静止垂直的时候,G=29.4N。当倾斜最大角度30°时,计算可得则此时的重力=25.4604N。
倾斜30°时,可能造成驱动小车失去重心,导致浮空的部分是支撑轴以上的部分,这部分的重量为565g。假设这部分的重力全部是竖直向下,则重力=5.537N。比大,说明所配重的重量在模拟上是能满足要求的。
在进行实物受力分析后,发现机器人在运行过程中,驱动小车没有失去重心。说明配重成功。
2.5 受预紧力的紧螺栓连接计算
支撑轴上部和上层托板的连接是只承受预紧力的紧螺栓连接的一种。它不仅要承受因预紧力的拉伸而产生的拉伸应力,还受螺纹摩擦扭转产生的扭转切应力。因此,在计算仅受预紧力的紧螺栓强度时,应考虑拉伸应力和扭转应力。
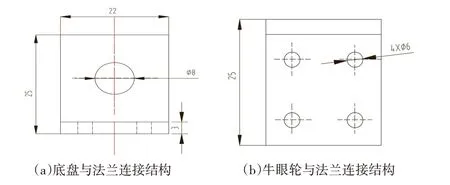
图4 牛眼轮法兰的固定连接结构图


由螺栓预紧状态下的最大应力公式计算可以得到最大应力为5.65N;支撑轴加上上层托板的重量为565g;d为3mm;最后可以得出=0.8Mpa,=0.4Mpa,=1.04Mp

查阅机械设计手册可以得知不锈钢M3 螺栓的抗拉强度为1.8Mpa,小于最大抗拉强度,故满足拧紧螺栓所需要求。
3 直流减速电机的选择
巡检机器人球体内部空间有限,对速度又有一定的要求,所以,步进电机由于体积较大,不能自如的控制速度。不能满足要求。最终选择直流减速电机作为巡检机器人的驱动元件。
假设速度V为1m/s,驱动装置中驱动小车轮子直径D为65mm,由公式计算出直流减速电机转速N为:4.9r/s。
式中 N——电机转速(r/s)
V——机器人滚动时速度(m/s)
d——车轮直径(mm)
直流减速电机的电压有6V、12V、24V 等,因为6V 直流减速电机不能升压为12V,容易把电机驱动板烧坏,所以不采用6V的直流减速电机。剩下12V和24V的直流减速电机,因为上文得出转速N=4.9r/s,即转速N=294r/min。
可以算出直流减速电机的扭矩。在总重量为两个电机加上轮子联轴器法兰重量为460g,锂电池重量为180g,,配重重量1500g,支撑轴和上层托板重量为565g。全部加起来小车的重量为2705g。小车轮胎与亚克力求的摩擦系数在留有余量的情况的取0.2。
5 结论
针对无人值守农场,设计一款动力驱动小,巡航时间长的农业巡检机器人,给出了双轮球形机器人的机构,设计结构可以增加其长时间巡查作业,在机器人机械结构上加在视觉传感器,可实现农场的无人化监测。