无人机目标跟踪系统的设计与实现*
2021-01-12成海秀陈河源曹惠茹徐欣桐黄畅
成海秀,陈河源,曹惠茹,徐欣桐,黄畅
(1.中山大学南方学院电气与计算机工程学院,广州 510970;2.广东工程技术职业学院信息工程学院,广州 510075)
0 引言
无人驾驶飞机(unmanned aerial vehicle,UAV)是利用无线电遥控设备和自备的程序控制装置操控的不载人飞机,简称无人机[1]。无人机具有方便携带、体积小、低成本、质量轻、操作灵活等优点[2-5],在众多领域具有广泛的应用前景,例如交通检查、电力巡检、资源勘探、森林防火、大气监测、航拍等[6-8]。随着无人机技术和传感器技术的急速发展,两者的充分结合孕育出了许多功能各异的飞行器,这使得无人机在军事和商业上的应用成为一种可行的选择。然而现有的大部分无人机仍然采用人为远程操控和跟踪预定的航迹[9-10]。因此本文设计一款能智能跟踪目标的无人机目标跟踪系统。
无人机跟踪系统设计中,视觉识别跟踪技术是研究无人机跟踪的关键领域[11-14],对于无人机的发展而言,更是必不可少。根据目标的不同,视觉跟踪技术可以分为对人的跟踪和对物的跟踪两种类型[15-16]。对人的跟踪需要考虑人的动作姿态等问题,识别难度较高,而对物的识别主要是从大小、形状和颜色的特征进行识别,在图像中获取物体的外部特征信息通常是固定不变的,识别难度较小。因此本系统中无人机对目标的跟踪是通过颜色视觉识别技术和超声波测距技术对物的跟踪进行的。
传统视觉识别主要存在的问题如下。
(1)数据量大,实时性差。例如传统的视觉识别传感器在获取图像信息时不可避免地会产生大量的数据,实时性较差[17]。
(2)对处理器要求比较高。在视觉识别中,处理器要实时性获取图像信息,大部分处理器的性能无法支撑,往往需要依赖计算能力强大的远端主机来完成。
为了解决传统无人机视觉跟踪由于目标的快速移动而导致的无人机与被跟踪目标易发生碰撞的问题,本文采用超声波测距模块与Pixy2传感器模块相结合的方式进行无人机目标跟踪。本文中的无人机目标跟踪系统中的开发机飞行控制是在无人机体上使用Arduino Mega 2560 主控板结合超声波模块测距数据和Pixy2传感器模块的颜色识别数据综合进行的。
1 Pixy2 CMUcam5 视觉传感器
Pixy2 CMUcam5 视觉传感器是一款具有图像处理能力的开源视觉传感器[18],使用色调过滤算法(hue-based color filtering algorithm)对目标图像进行处理,可以从一帧完整的图像中提取出需要的颜色数据,传感器模块内置的专用处理器对所获得颜色数据进行处理后,传输到Arduino或者其他适配的微控制器中。传统的图像识别处理,通常由微控制器负责全局的数据处理。 而使用Pixy2 CMUcam5视觉传感器时,其自带的具有图像处理功能的处理器可以独立完成图像方面的数据处理,大大减轻了微处理器的工作负担,使得微控制器可以进行更多更为复杂的操作。Pixy2 CMUcam5视觉传感器如图1所示。

图1 Pixy2传感器
Pixy2传感器最高支持7种颜色,具有强大的多色彩颜色识别及色块追踪能力,图像识别容易,支持多物体识别。目标跟踪系统在通过Pixy2模块进行目标跟踪时,提前将与被跟踪物体相同的颜色进行记录存储。其可以同时识别多个物体,具备优秀且快速的图像处理能力,只需要16.7 ms就能完成对一帧图像的处理。在实际的识别跟踪中,Pixy2可以每16.7 ms对物体的位置进行完整更新,应对快速移动中的物体也能做到很好地识别跟踪。
Pixy2 支持多种通信接口,例如常用的UART 串行、SPI、I2C、USB、数字I/O、模拟I/O等,通过USB线连接到计算机的PixyMon,当PixyMon 运行后,你会看到如下信息“Pixy programming state detected”在PixyMon 的命令窗口区。此时Pixy2 与计算机连接成功,然后就可以对Pixy2 传感器进行功能设置和调试,提高检测精度。本文设计的无人机目标跟踪系统使用FC-10P转FC-6P连接线将Pixy2连接到Arduino Mega 2560开发板的ICSP接口上,使得无人机系统可以每秒完成60帧画面的处理,实现了无人机对目标物体移动的快速跟踪响应。PixyMon软件演示效果图如图2所示。

图2 PixyMon软件演示效果图

图3 超声波模块HC-SR04
2 超声波模块HC-SR04
HC-SR04 超声波模块是一种可以提供2~400 cm 的距离感测功能的传感器,可测量精度达到3 mm。模块由超声波发射器、接收器与控制电路组成,如图3所示。
超声波模块启动时,需要给至少10 μs 的高电平脉冲信号,触发引脚Trig。HC-SR04会持续发出8个40 kHz的方波,不断检测信号值是否有返回。检测到返回信号后引脚Echo输出一个高电平脉冲,高电平脉冲的持续时间从超声波发射到反射返回。计算公式:距离=(高电平脉冲时间×340)/2。HC-SR04模块可以不断检测无人机周围的环境情况,辅助无人机目标跟踪系统的运行。
3 无人机跟踪系统的硬件系统设计
本文设计的无人机目标系统机构如图4 所示。各部分的主要功能如下。
(1)Pixy2传感器模块。该模块负责对指定物体进行视觉识别,并根据指定物体相对摄像头的位置将物体的大小和位置信息发送给主控板的ICSP端口。

图4 Pixy2视觉识别无人机跟踪硬件系统结构
(2)超声波模块。该模块负责对指定物体进行测距,将超声波发射模块与超声波接收模块的数据发送到主控板I/O口。
(3)无线模块。该模块主要由遥控器与接收机组成,接收机将6个通道遥控的信号发送到主控板I/O口。
(4)主控模块。系统采用配置了ATmega256处理器的Arduino Mega 2560 开发板作为主控板。其主要功能包括接收来自Pixy2 传感器模块的视觉识别信号与超声波模块的距离信号,根据指定物体获取信息中的大小和位置数据,判定物体相对摄像头的运动关系;根据指定物体相对摄像头的运动关系,判决无人机应采取的飞行姿态。
(5)无人机体。无人机体采用F450 机架、XXD 电机1000 kV马达、XXD30A电调、1045正反桨、2200 mAh锂电池。
4 系统软件设计
本文Arduino IDE开发环境下完成了系统的软件设计。首先将需要的端口进行定义,编写函数指令,将传感器数据与遥控器油门通道数据结合,实现对指定目标进行识别跟踪,获得目标颜色、横纵向位移、水平距离等参数,根据获得数据改变无人机的飞行轨迹。因此分为5个模块功能:
(1)Pixy2 代CMUcam 5 模块对跟踪目标的颜色、目标的移动位移;
(2)超声波模块检测目标物体与无人机的水平距离;
(3)Arduino Mega 2560 作为处理中心,处理整套无人机控制系统数据;
(4)接收机向Arduino Mega 2560传输遥控数据;
(5)qq 飞控接受Arduino Mega 2560 处理好的传感器数据控制无人机飞行。
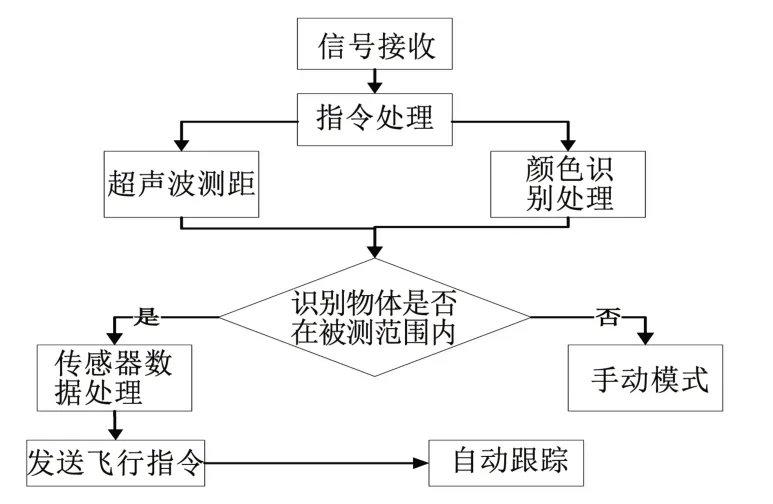
图5 无人机跟踪系统工作流程
5 系统功能测试
5.1 模块配置
系统供电后,Pixy2中间的LED闪烁后熄灭,模块启动正常,按压Pixy2上方的黑色按钮,大约1 s后,LED亮起白灯,待LED变为红色后松开按钮,Pixy2会进入“lightpipe”模式,LED的颜色与被测物体的颜色匹配时,Pixy2的LED会亮起与被测物体颜色相同的灯光,此时按下顶部按钮松开,即完成颜色的记录。LED灯的亮度与物体色调的饱和度成正比,所以亮度越高越好。
进行系统测试时,使用PixyMon软件进行校准和设置。首先打开PixyMon软件进行Pixy2的校准和设置。
当软件运行后,Pixy2 视觉传感器模块上的LED 会关闭,此时在屏幕上PixyMon 的命令窗口区会看到“Pixy programming state detected”这样的信息,然后就可以对多个被测物体的视觉特征进行定义。待Pixy2 配置好后,打Arduino IDE 软件运行系统代码,通过Arduino IDE 的串口助手测试Pixy2 模块与超声波模块是否正常工作。即完成了整个系统的测试前准备。视觉识别无人机现场如图6所示。

图6 无人机跟踪测试
5.2 测试流程
准备8 张彩色A4 纸,颜色分别为红、黄、蓝、绿、紫、青、黑、灰等8个RGB格式下典型色彩,然后将颜色不同的A4纸与无人机在不同光照环境下进行识别范围的测试,每种颜色A4纸测试15次,取其平均值。
测试超声波模块的识别距离,测15次,取其平均值。
5.3 测试结果与分析
(1)同一颜色在不同的光照环境下,Pixy2传感器识别的准确性与距离有所不同,在光照充足的环境下,青色与蓝色有效识别的距离较远,在弱光环境下,青色与黄色有效识别距离较远。黑色与灰色在整个实验过程中均无法有效识别,与Pixy2传感器识别算法的预期结果一致,测试结果如图7所示。由于Pixy2传感器采用的是色调过滤算法,受环境光照影响较大,在不同的光照下摄像头获取到的图像信息有所差异,所以图像识别的距离和准确度都会受到环境的影响。相对而言,环境亮度越高,Pixy2传感器对目标的识别距离越远。
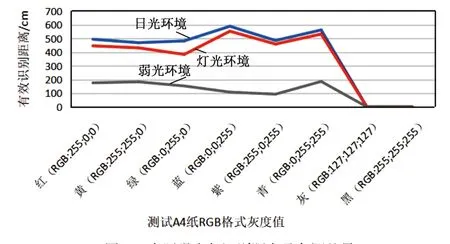
图7 光照强度与识别距离及色调差异
(2)超声波模块的有效测试距离为183 cm,与超声波模块的预期效果一致。
通过以上测试结果分析可知,Pixy2传感器的硬件配置和软件算法仍有很大的改进空间。在实际的视觉识别中,可以参考上述数据,根据所在环境的光照需要,设置合适的跟踪距离。
将多种颜色混合与形状不同的目标物体做进一步测试,对系统的视觉识别和自动跟踪性能进行测试。实验结果表明,该无人机目标跟踪系统对长方形、正方形、圆形等相对饱满的物体与颜色相对单一的物体识别率较高,跟踪响应速度快,并能够对多个物体进行识别跟踪。因此本文设计的无人机目标跟踪系统可以有效地完成对色块的识别和对运动物体的跟踪。
6 结束语
本文设计的无人机目标跟踪系统经实验检验,能够对规则形状和颜色的物体进行视觉识别,并且能使无人机实现自动跟踪。该无人机通过使用Pixy2 传感器、超声波传感器和Arduino Mage 2560 主控板对无人机进行控制,为视觉识别技术在无人机领域的应用进行了实践探索。该无人机的整体设计,在进一步完善后有望应用到更复杂的无人驾驶系统中。目前,无人机目标跟踪系统存在以下问题需要进一步完善:
(1)Pixy2 传感器在实际工作中对被测物体的颜色饱和度、形状大小及其所处的环境光照强度有着很高的要求,需要进一步完善算法、提升性能;
(2)目前Pixy2传感器固定安装在无人机上,只能检测前方180°视角的物体,通过加装可移动云台增加Pixy2的可检测范围;
(3)由于超声波模块的局限性,该系统的有效跟踪距离较短,需要进一步优化传感器的算法;
(4)对于无人机的防碰撞性,目前只能防止与正面物体发生碰撞,需要加装更多的超声波模块达到全方位防碰撞。
