基于车联网的多维驾驶员行为评价方法研究*
2021-01-12王晓慧荣见华杨向前
王晓慧,荣见华,杨向前
(1.浙江工贸职业技术学院,浙江温州 325002;2.长沙理工大学,长沙 410114;3.温州交运集团,浙江温州 325000)
0 引言
合理的驾驶行为评价包含了多重意义,从企业角度来说,通过驾驶行为评价,可以帮助企业改善车队的管理;通过评价的反馈,可以不断改善驾驶员的驾驶行为[1],使企业在安全、能耗、车辆维护方面成本显著下降。从行业角度来说,在商用车行业内推出驾驶行为评价模型,形成具有可信度的行业标准,可以扩大车企在行业内的影响力。
目前斯堪尼亚、戴姆勒Omniplus、FleetBoard等国际一流的商用车都推出了关于司机驾驶行为的评价功能。通过驾驶行为评价功能的使用,FleetBoard 官方宣传平均油耗下降10%,油耗最多下降15%,保养成本下降3%~5%。斯堪尼亚FMS 官方宣传油耗平均降低10%,驾驶行为评价存在非常大的商业价值。
1 总体方案设计
构建多维驾驶行为评价体系,从人、车、环境三方提出驾驶行为表现影响因素,构建先进性且可落地的评价指标。为了实现驾驶行为评价,必须对人、车、环境三方的相关因素数据进行采集和挖掘,并进行有效地处理,采用合适的要素数据和评分模型对司机的驾驶行为分别进行综合评价。总体方案设计如图1所示。

图1 总体方案设计
由于采用多目标多维度进行驾驶行为评价,所以要对每个目标对应的维度和要素进行分析,才能确定采集数据信息,因此把整体流程划分为5个步骤,如图2所示。

图2 整体流程图
2 维度设计及因素分析
维度设计是指对每个评价目标进行分解,梳理出与目标关联最高的行为维度,例如影响安全的维度包括是否违章操作、操控是否急躁、用车是否合理、开车会不会分神以及车况的状态好不好;与经济型相关的维度主要包括操控是否急躁、空调使用是否合理等。由于不同车型的评价维度会有所差异,因此这里以客旅团车为例进行阐述。基于麦肯锡的MECE分析法[2],可以对安全、油耗、舒适和维护4 个维度进行一一分解。
2.1 维度设计
多维度评价方法的评价目标为安全、油耗、维护、舒适4个目标,每个评价目标进行分解和维度设计。
2.1.1 安全
“安全”可以拆分为违章、操控、使用、注意和车况5个维度,如图3所示。其中,“违章”是与驾驶安全[3-5]相关的违章行为;“操控”是司机的不良操控行为(方向盘、油门使用不当)导致车辆存在事故风险的因素集合;“使用”是指由于司机不良的其他操作导致车辆存在事故风险的因素集合;“注意”是指由于司机本身注意力下降导致车辆存在事故风险的因素集合;“车况”是指车辆本身的故障问题导致车辆存在事故风险的因素集合。

图3 “安全”维度设计

图4 “油耗”维度设计
2.1.2 油耗
“油耗”可以拆分为操控和空调2 个维度,如图4 所示。其中,“操控”是司机的不良操控行为(方向盘、油门使用不当)导致油耗高的因素集合;“空调”是指司机不当使用空调导致油耗高的因素集合。除此之外,虽然不当使用灯光、音响等也会升高油耗,但这些因素相对而言对油耗影响较小,另外也很难界定哪些行为属于不当使用,因此并没有把这些维度列举在内。
2.1.3 舒适性
“舒适性”可以拆分为操控和路况2 个维度,如图5 所示。其中,“操控”是司机的不良操控行为(方向盘、油门使用不当)导致用户乘车舒适性降低的因素集合;“路况”是指司机在通过特殊路段(下坡、减速带)没有减速导致用户乘车舒适性降低的因素集合。

图5 “舒适性”维度设计

图6 “维护”维度设计
2.1.4 维护
“维护”可以拆分为三大件和易损件2 个维度,如图6所示。其中,“三大件”是容易造成三大件损害的因素集合;“易损件”是对特定易损件造成伤害的因素集合。
2.2 要素分析
要素分析是指分析每个维度的相关要素,例如危害驾驶安全的违章包括闯红灯、超速、实线变道等;而操控急躁包括急加速、急刹车、未关门起步等;目的、维度和因素分析框架图如图7所示。
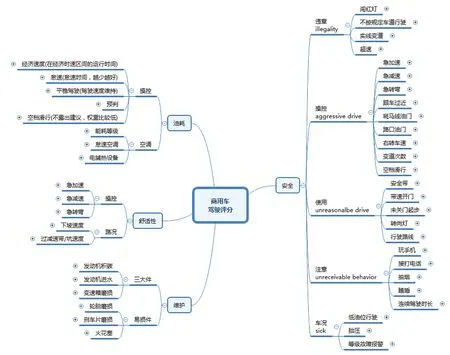
图7 目的、维度和因素分析框架图
3 数据采集及处理
数据源是指每个要素需要的数据来源情况,例如为了获取闯红灯数据,需要司机的身份证、行驶证和排班信息,为了获取急加速数据,需要获取GPS 的速度数据或TBOX 的轮速数据或三轴加速度传感器的加速度数据[5-6]。基于上述因素分析,进一步梳理了相关因素的数据来源及对数据采集的要求,包括司机身份信息模块、GPS 模块、TBOX 模块、传感器模块、ADAS 模块、车内摄像头模块以及车内温度计模块。
3.1 数据来源
3.1.1 司机模块
司机模块收集司机的身份信息,由于车与人并不总是一一对应,因此需要收集司机排班信息,才可以唯一确定违章归属。
3.1.2 GPS模块
GPS 模块主要采集用户的位置信息和速度、方向等信息,虽然“速度”信息TBOX也可以采集,但由于TBOX数据采集量大,整体取样频率不高,因此在计算急加速、急减速、急转弯、超速等指标时主要依赖于GPS 采集的数据。灰色背景标记的“海拔”和“水平精度”是GPS 模块提供的字段,但是非必须采集。
3.1.3 TBOX模块
TBOX 采集的数据包括车辆数据、警告信息、发动机数据、胎压信息等。
3.1.4 其他模块其他模块包括传感器模块、ADAS模块、车内摄像头模块和车内温度传感器模块。
3.2 数据预处理
不同的数据来源收集到的数据有不同的精度,为了提高数据的利用率,可以采用相应的方法进行改善。对于较高频率的GPS 及传感器相关数据,斑马数智提出了一种改进的带次优渐消因子的自适应扩展卡尔曼滤波算法。模型的原理如图8所示。

图8 带次优渐消因子的自适应扩展卡尔曼滤波算法
为了提高滤波器的跟踪能力和过程参数变化的鲁棒性,此次应用变化的渐消因子对过去的数据进行渐消[7],过程中同时调整状态的预报协方差方差阵。应用渐消因子可以起到即使在过程参数改变的状态下,滤波器也能得到较精确的状态估计值的作用。图9所示为经过滤波器前后传感器示数的变化情况对比,可以看出,经过滤波器之后,传感器数据的噪声被有效去除,趋势数据显得更为明朗。

图9 滤波前后传感器示数对比
4 评价模型构建
模型构建是指为了获取最终的行程评分,需要确定各个指标之间以及各个目标之间的相对权重。这里包括两种方法,一是基于模型的方法,“油耗”、“安全”等目标都有清晰的评价标准,因此指标与指标之间的权重评估适用此方法;二是基于专家打分的方法,各目标之间(例如“安全”和“油耗”之间)数据无法直接评估出二者对行程分的相对重要性大小,因此这里需要由相关业务专家针对不同车辆类型进行评估,确定其权重。模型的数据流如图10所示。
4.1 基于模型的方法(GAM模型)
对于司机驾驶“安全”和“维修”的评估,类似于车险领域的“出险率”评估。
为避免随着司机驾驶年龄和驾驶经验的增加,或者汽车的使用年限增加,最终导致车辆事故风险也会相应减少或增加导致“出险率”评估出现较大误差(假设司机的个体风险水平为定值),国外的学者提出了用泊松回归模型,替代原有齐次泊松混合模型作为车险索赔频率模型。泊松回归模型属广义线性模型(Generalized Linear Model)的一种,以对数变化作为连接函数(canonical function),该模型的假设之一是其被解释变量服从泊松分布,其模型形式为:

对比普通线性模型、逻辑回归模型以及泊松回归模型,可以发现,这几个模型除了等式左边形式不同,当因变量取特定值时,这些模型所假设的y 的随机分布形式也不一样,如图11 所示。图中虚线为模型预测的因变量y 的平均值,点为实际数据值,图11(c)细线为特定自变量取值下因变量y 的分布。由于出险次数主要集中在0~3 次,因此通过对比可以直观感受到普通线性模型和逻辑回归模型的不适用性。

图10 模型的数据流
对于“油耗”,即经济性评估,可使用广义加性模型,用单个光滑函数来估算其中每一个加性项,从而获知每一加性项中因变量与自变量的变化规律。经典线性回归模型假定因变量y和自变量x1,x2,…,xp是线性形式:其中,β0,β1,…,βP通过最小二乘法获得。广义加性模型本质是广义线性模型的扩展:



图12 GAM模型的样条函数示意图
4.2 基于专家打分的方法(德尔菲法)
模型各指标确定的另一个方法是基于专家打分法,虽然可以基于模型计算出“安全”、“油耗”、“维修”的各指标权重,但是对于“舒适性”并没有一个直接的因变量可以用于建模,同样的问题也出现在单次行程总分和车辆(司机)评分上。因此,在这里需要由业务专家根据经验及实际运营需求,合理制定各指标权重,德尔菲法是常用的专家评分法[8]。德尔菲法流程如图13所示。
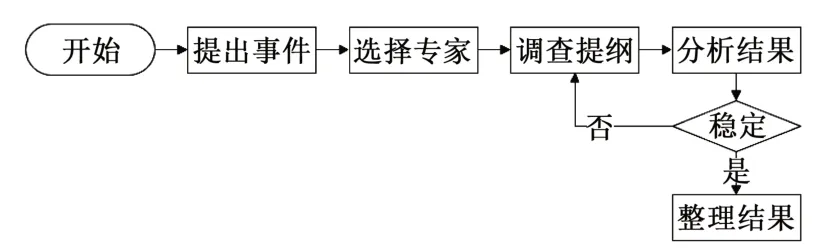
图13 德尔菲法流程
5 结束语
本文基于车联网数据,采用合适模型构建的多维度驾驶行为评价方法更全面更合理,对于企业和个人都有非常重要的作用。
(1)基于行程的评分,对车辆(司机)的每段行程进行评分,达到快速回顾自身驾驶过程状况的目的;
(2)基于车辆(司机)的评分,将评分结果落实到个人,通过评分的反馈促进责任主体进行驾驶行为的改进,为实现企业的既定目标奠定基础;
(3)基于路线的评分,在企业范围内,对企业内的多条线路进行评分和排名,通过企业内多条线路间的比较横向评比,提高各个线路的车队管理水平;
(4)基于企业的评分,在行业范围内,定期发布企业驾驶行为报告,通过企业间的评比,促进企业自身管理水平的提升。
