智能可移动的空气净化器的设计*
2021-01-12宋云飞常博景蔡洋洋
宋云飞,常博景,朱 磊,蔡洋洋
(合肥工业大学机械工程学院,合肥 230009)
0 引言
净化空气,改善空气质量,已成为人们心目中的共识。因此,空气净化器应运而生。然而,随着国内外空气净化器的迅速发展,传统的固定式空气净化器所存在的若干弊端也日益显露出来。主要表现在传统的空气净化器净化范围较小、需在密闭的空间内运行、工作时位置固定,净化范围局限于其所处区域。此外,家庭中复杂的多居室环境,在一定程度上降低了空气净化器的净化效率。而人为移动空气净化器既耗费精力,又难以准确辨别其最佳位置。本文提出了智能可移动的室内空气净化器,力求室内空气净化效率最大化。
1 方案设计
1.1 总体方案
本设计的总体结构采用星形布局,即一个净化端主机和多个测量端从机结合。系统功能分析图如图1所示。净化端主机主要负责从多个测量端从机接受数据的分析与整合,并根据算法计算出各个采样点的空气质量指数,作出路径规划;从机分布于室内所选取的各个采样点且附有各种传感器,如图1所示,负责实时采集各个采样的空气质量信息,并通过信号传输模块将其发送到主机。主机根据内置的算法,分析出各个采样点的空气质量指数,并作出净化路径,控制移动模块向既定位置移动。到达相应采集点后,开启净化模块,完成对该点空气的净化任务[1]。

图1 功能分析图
1.2 结构设计
1.2.1 移动底座
空气净化器的净化模块内置左、右2个电机,通过对2个电机的转速调节来实现转向和直行,从而可以准确到达室内任意采集点的位置,并实现空气净化的作用。空气净化器的驱动底座图如图2所示。具体工作时,检测端向空气净化器发送信号,经通信单元传送至微控制器,进而计算出移动方位。再通过微控制器发送相应的脉冲信号到电机,以实现对2个电机转数的控制。
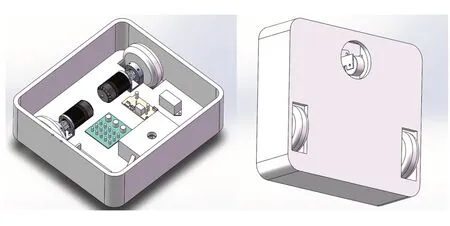
图2 驱动底座图
1.2.2 净化器部分
空气净化器的主体结构如图3 所示,根据流体动力学理论,运用倒“T”型的气路结构,如图4所示。在净化器的上端,利用高效离心风机(图5)产生的负压,将入口空气吸入风扇。而净化器下端为HEPA[2],气流通过HEPA时会被HEPA滤纸的高效玻璃纤维所吸附(即空气在HEPA 入口处经滤网过滤,并经扇叶甩出),以实现对大颗粒污染物的初步过滤,并且可以在气门与离心风机之前设置可更换HEPA 滤纸以保证净化效果的同时,不会影响电机的正常工作。该处采用的HEPA 使用V型结构以保证迎风横断面之比和滤料面积的同时,还可以使结构更加紧凑,减小压力损失[3]。

图3 空气净化器结构图

图4 倒“T”型气路结构模型图

图5 离心风机
1.2.3 探测部分
探测模块的工作流程如图6 所示。该系统的控制终端为微控制器,通过空气质量检测器的配合来检测空气质量。该模块由PM2.5 传感器、甲醛传感器、温湿度传感器、信号发射器等几个部分组成,可以实时监测室内PM2.5、甲醛、粉尘等空气污染物的状态。如果浓度超过正常范围,信号发送器将向净化器发送信号,然后借此来控制净化器的开关及运动路径。

图6 探测部分工作示意图
2 关键技术
2.1 探测技术
探测技术主要由复合智能传感器实现。工作时,该智能传感器通过识别1 μm 以上的颗粒的浓度,将探测结果传给微控制器,通过微控制器内部计算与优化,输出行动信号使该空气净化器移动。该设计省去了传感器直接输出脉冲部分,减轻了传感器负担,增加了传感器的寿命,而且也降低了总处理器的负担,从而提高了用户对该空气净化器的整体验[4]。
2.2 空气净化器移动状态分析
安装于小车底盘上的5 个光电对管寻迹传感器(空气净化器探测部分)布局如图7所示[5]。小车的运动方向由左右驱动轮决定。而各个万向轮可以实现左转、右转和前后移动,通过对运动的合成可以确定该空气净化器的最终行动轨迹。3个万向轮的速度大小根据红外感应器偏离中心的程度决定,左右偏离越大,速度越大,左1、右1比左2、右2的速度更大。速度整体调节是由PWM波的占比实现的。循迹子程序中红外光电管与小车偏转方向关系如表1 所示,0(此时才能检测到白线)代表低电平,1代表高电平。

图7 红外传感器检测分布图

表1 红外光电传感器状态与小车偏传方向分析
2.3 主程序控制流程
空气净化器开始循迹后,I/O口通过读取上层微控制器的数据,并根据数据的变化进行判断,将相应信号发送给电动机,进而控制小车的运行。主程序流程如图8所示。

图8 主程序控制流程 图9 循迹程序流程
2.4 路径规划和避障系统
2.4.1 避障系统
避障系统由STM32F407 单片机开发板组成。该系统主要包括感知系统和移动系统,其可以在感知外界信息后加以处理来控制整个空气净化器移动。感知系统通过光电编码器对空气净化器位置移动的信息进行掌握,应用防跌落和循迹传感器可获得环境信息;移动系统由1个万向轮和2个直流电机控制的橡胶轮组成,直流电机采用L298N驱动芯片对PWM进行控制,并采用PID算法来确定轮子的转向[6]。
小车进入循迹模式后,一旦检测到某个I/O口有信号,即进入判断处理程序,先确定5个探测器中哪个探测器探测到了白线,然后相应地执行前进、左转、右转等操作,循迹程序流程如图9所示。
2.4.2 路径规划
所谓路径规划,是指空气净化器可以自主决定路径,并能够正确判定障碍物的位置,从而避开障碍物。因此,在路径最短、使用时间最短、消耗能量最少等预定的准则下,如何选择一条最优化的路径,是个很重要的问题。具体采用人工神经网络的移动路径规划算法,即采用神经网络算法描述机器人移动环境的各种约束,计算碰撞函数,将迭代路径点集作为需要优化的目标函数,通过求解目标函数的最优值来确定点集,从而实现路径最优规划。
3 结束语
本文针对传统的室内空气净化器存在的局限与不足,提出了一种智能可移动的室内空气净化器,通过对室内(家庭、医院、工厂、企业等通风性较差的私人或公共场所)空气进行高效净化,在保障民众拥有良好的生活环境和舒适的工作环境的同时,降低对民众日常室内活动的影响,为治理污染、提高百姓生活质量做出贡献。
