五轴联动工具磨床的关键技术及其研究现状*
2021-01-12叶启立赖志伟刘小杰王成勇郑李娟
叶启立,赖志伟,刘小杰,李 姣,王成勇,郑李娟※
(1.广东工业大学机电工程学院,广州 510000;2.株洲钻石切削刀具股份有限公司,湖南株洲 412000)
0 引言
五轴联动工具磨床是对复杂自由表面刀具进行高效磨削制造的关键设备[1]。经济全球化的发展对全球各个国家的数控机床的进出口发展有重要影响。2018年全球机床出口总额接近516亿美元,其中德国出口值约103.7亿美元,全球排名第一,德国出口机床中,磨床占23%,增长排名第一。在机床进口方面,中国进口总额为94.6 亿美元,全球排名第一,其中磨床占24%,增长排名第二[2]。2019年1-9月中国金属加工机床进口品种占比及进口值排名情况如图1所示,其中磨床进口值为7.6亿美元,占比13.3%[3]。

图1 2019年1-9月中国金属加工机床进口品种占比及进口值排名情况
随着航天航空、模具、汽车、轨道交通等行业的飞速发展,传统刀具的加工效率、质量、寿命及精度已不能满足加工制造日益增长的需求。而要实现复杂自由表面刀具的批量生产,对生产设备提出了巨大挑战,传统的三轴磨床已不能满足高精、高效、高可靠的生产需要[1]。五轴联动工具磨床的使用成为解决上述问题的关键。
五轴联动磨床属高档数控机床,其设计与量产代表着国家工业制造的水平。高端五轴联动磨床的研发与制造可作为国家迈向制造业强国的发力点,只有提高了制造能力与制造水平,掌握关键制造技术,才能夺得高速发展制造业的主动权。因此,加快自主研发五轴工具磨床的步伐,掌握五轴磨床的核心技术,实现高效、高质量地生产复杂形状刀具和零件,对中国制造业发展具有重要意义。本文介绍了国内外主要五轴工具磨床及其数控系统的主要产品,详细阐述了国内外在五轴工具磨床关键结构、数控系统、检测系统以及磨削工艺的研究进展。
1 五轴工具磨床现状
1.1 主要产品性能
国内外主要五轴工具磨床及其数控系统的主要产品如表1所示。由于五轴联动工具磨床的制造难度大,国内能生产和销售五轴联动工具磨床的企业主要有台州北平机床有限公司、大连科德数控有限公司、上海黑格数控有限公司、武汉机床厂及北京广宇大成数控机床有限公司等。目前,国外的部分高端数控磨削设备或其关键部件对中国实行垄断,使得中国自主研发五轴联动高端磨床的发展受阻[4]。一款高端、先进的五轴加工磨床应能在保证加工尺寸精度及复杂轮廓形状精度的同时,保证加工表面质量,达到较高的加工效率且维持较低的加工成本。在加工精度方面,需要提高五轴磨床的定位精度和运动精度;在加工效率方面,需要依靠自动化控制,利用机械手完成坯料自动输送,同时保证工件单次装夹就能完成各个工步的加工,获得成品[5]。

表1 国内外主要工具磨床生产企业及其产品
1.2 数控系统对比
传统的数控系统为国外的封闭式系统,由数控系统生产企业研发并投入市场,如日本发那科(FANUC)、德国西门子(SIEMENS)和德国海德汉(HEIDENHAIN)等,修改和扩展控制软件困难,因此,五轴磨床开放式数控系统成为重点研究方向之一[6]。还有一些数控系统由部分数控机床企业针对自身机床专门设计,如瓦尔特、昂科、德马吉森精机等。表2所示为部分常见数控系统制造商及型号。

表2 常见数控系统厂商及型号
机床数控系统是数控加工机床的控制中心,是自主研发高端数控机床的核心部分。如今,国内越来越多企业开始研发各类机床的数控系统,其中也有不少企业在市场中拥有不错的口碑,如占领国产高档数控系统市场的华中数控,具有较高性价比的广州数控,还有航天数控、沈阳高精等快速发展的企业。表3所示为常见的国产数控系统。

表3 常见的国产数控系统
2 关键结构的研究进展
五轴联动磨床的结构设计是研发该设备的关键问题。因为五轴联动磨床具有5个运动轴,五轴联动的位置关系和运动配合要求互不干涉,因而其结构优化设计具有较大的难度。在有限的空间里优化各个结构布局,是实现设备高效、高速加工的前提,因此五轴磨床的工作台、进给机构、上下料机构和磨削砂轮等关键结构的优化设计尤其重要。
2.1 工作台结构布局
五轴磨床工作台是进行工件加工的重要平台,工作台的设计方案会直接影响工件加工的精度和磨床的可加工性。常见的五轴磨床工作台的结构包括摇臂式工作台结构、立式工作台结构、砂轮平动-工件转动工作台结构、工件平动-砂轮转动工作台结构。
上述工作台的结构各有特点,可加工不同类型的工件,可根据不同的加工要求选择不同工作台结构的五轴磨床进行加工。摇臂式工作台结构复杂,砂轮仅能水平、垂直方向摆动,是一种可满足多种加工要求但加工精度不高的传统工作台布局;立式工作台结构采用外置支撑台方式,安装较简单且方便后期的维护和检修,工作台可以随加工轴同步转动,提高加工精度,但不适用于磨削力度较大的场合;砂轮平动-工件转动工作台结构采用内置支撑台方式,故工作台较小,因而只可加工较短的工件,3个直线轴(X、Y、Z轴)相互垂直,C轴为控制工件台摆动的转动轴,B轴为控制工件旋转的转动轴;工件平动-砂轮转动工作台结构由于工作台较长,在加工较长工件时有较大的优势,砂轮做回转运动因而刚性较低,需增加一些辅助机构提高其砂轮刚性。
有不少学者在五轴磨床工作台方面进行了研究,李朝钦[7]根据现有工具磨床加工操作不方便等问题设计了一种采用三坐标轴工作台的五轴工具磨床,此类工作台可以做纵向、横向和垂向运动,具有良好的刚性及稳定性。陈宝华[8]探究了五轴磨床工作台的设计方案,介绍了常见的工作台形式,然后针对五轴磨床的特点,改进工作台的运动方案,最后提出将大理石作为制造工作台新型材料的方案。崔建昆等[9]对五轴磨床工作台及其零部件进行了结构设计,包括三直线轴导轨及滑台等零部件的设计,通过分析和比较不同工作台的结构,总结出较为合理的工作台结构的设计方案。王春燕等[10]对五轴数控磨床的工作台连接件进行了研究,利用ANSYS软件对工作台连接件分别进行静力学和动力学分析,在静力学分析方面,得出连接件的最大变形量为2.23 μm,最大应力为2.1336 MPa,两者均满足设计要求;在动力学方面,利用模态分析得到连接件各阶模态数据图,其第一阶固有频率远大于电动机激荡频率,满足设计要求。然后根据分析的结果对工作台连接件的结构进行6Sigma 优化分析设计,使其达到实际工作的要求。
对于五轴联动磨床工作台及其连接件的设计,除了需要考虑加工精度的要求,同时还需要考虑磨床整体结构的紧凑性和刚性。设计的总体方向为不断提高五轴磨床的加工精度同时,对磨床结构进行精简,减小整体体积,便于操作。
2.2 进给机构
五轴磨床的进给机构是改变工件和砂轮相对位置的重要结构,包括直线进给机构、旋转进给机构。图2所示为五轴磨床的进给机构[11],其进给机构的移动范围和移动精度将直接决定五轴磨床的加工能力,进给机构一般要满足较小的进给摩擦力、较高的运动精度和较高的耐磨性。因而对进给机构进行研究,确保进给机构的精度和工作寿命,有利于提高制造五轴磨床设备的水平。X 轴、Y 轴、Z 轴、A轴和C轴都为五轴磨床的进给机构,其中,X轴、Y轴和Z轴为直线进给机构,X轴和C轴为旋转进给机构。

图2 五轴磨床的进给机构
五轴磨床进给机构的应力情况和位移情况是评判其加工性能的重要指标,因而获得不少学者的关注。张耀娟等[12-13]使用SolidWorks 中的仿真模块分别对五轴磨床的直线、旋转进给机构进行了静力学分析,结果表明,直线进给机构在承受主要外载荷处出现2 MPa 的最大应力值,在机构中部位置出现0.01588 μm的最大位移;旋转进给机构也在承受主要外载荷处出现最大应力值,B 轴工作台最大应力达0.3 MPa,C 轴为1 MPa,最大位移则分别在B轴和C轴的中下部和右端出现,其中B 轴最大位移为0.001284 μm,C 轴为0.002884 μm。该结论为改善五轴磨床重要零部件的可靠性提供了方向。杨克等[4]对五轴磨床X轴的导轨座和滑板座进行了结构设计,为保证进给的精度,采用单独的伺服电机传动,X轴的重复定位精度和直线度为5 μm,定位精度为0.8 μm,各轴垂直度和直线度分别达0.01 mm、0.005 mm。刘远航[8]对五轴磨床的进给运动系统进行了结构设计,根据液体静压支承原理,设计3个直线轴的液体静压支承结构及其相应导轨结构,X轴有效行程为350 mm,零位承载力为3955 N。

图3 一种自动上下料机构
2.3 自动上下料机构
自动上下料机构是五轴联动磨床设备的辅助加工机构,可实现工件坯料和工件成品自动更换,大大提高工作效率,同时减少人工重复进行的单调操作,降低人力成本。图3所示为一种自动上下料机构[14],主要包含料盘组件、上下料机械手组件和锁刀机构。料盘组件的作用是装载未加工工件和已加工成品。不同的料盘型号装载不同的直径工件,与机械手的配合位置也不同,因此,为保证准确地与机械手进行工件交接,料盘设计需要考虑一定的精度。上下料机械手负责完成送料、卸料和换料过程,运行过程中,需要和料盘、磨床进行精确交接。上下料机械手具有多个运动自由度,其运动方式具有一定的复杂性,设计时应考虑运动精度、位置精度等。锁刀机构用于工件的装夹,保证在自动上下料过程中,工件不会掉落,完成自动上下料操作。该组件的锁刀动作一般依靠液压传动实现,需要适宜的锁紧力,既保证工件不会掉落,也不会损坏工件。
虽然自动上下料机构是五轴磨床的辅助加工机构,但对其进行的研究,可有效提高五轴加工的效率和自动化程度。林阳等[15]设计了一种适用于五轴联动工具磨床的刀具上下料机构,完成了料盘、机械手和锁刀机构的设计,分析了卸刀、换刀和上刀3个重要工序的运动控制过程,利用PLC控制各部件,使得各部件的运动达到精度要求并平稳运行。王冬生等[16]设计了一种陶瓷托辊磨床的自动上下料系统,基于设计的磨床上下料系统,在软件对上下料系统进行仿真,结果表明该系统符合工作要求,可提高工作效率。段闪闪等[17]设计了一种用于自动上下料的机械手结构,分别对机械手的腰座结构、末端执行器进行了设计,利用步进电机驱动伺服液压缸的形式实现机械手的驱动,可达到一定的运动精度。陈虎等[18]设计了一种五轴立式自动上下料加工系统,包括有送料、上料机构和数控机床三大部分,送料机构沿X/Y轴运动,上料机构沿Z轴运动,通过两者的相互配合实现自动上下料。
2.4 工件辅助支撑机构
五轴联动工具磨床在磨削较长的刀具时,磨削加工接触点与刀具装夹位置的距离过长,会使工件在加工过程中发生形变和跳动,严重影响加工精度。此类工况下,需要工件辅助支撑机构为工件提供有效支撑,实现稳定、高精度加工过程。图4所示为工件辅助支撑机构示意图[19],该机构的重要指标是最大支撑尺寸,分为最大支撑直径和最大支撑长度。支撑机构应尽量精简,降低占用机床的体积,同时避免与磨削砂轮的干涉。

图4 工件辅助支撑机构示意图
在工件辅助支撑机构的研究中,赵春永等[20]针对原支撑结构会损伤工件的问题,将原结构改进成双支撑轮结构,该机构便于装卸且有效支撑宽度大于30 mm,有效提升了工件的平面度。葛建华[21]对UWIF 五轴磨床的支撑结构进行了改进,增加了支撑机构的横向调节功能并阐述其工作原理,改进后的支撑结构制作更容易,提高了实用性。
2.5 磨削砂轮
砂轮是五轴工具磨床中,与零件直接接触的关键部件,直接影响工件加工质量和磨床加工性能。砂轮主要由磨料和结合剂组成,磨料、粒度、硬度是影响砂轮性能的主要因素,可从这几个方面考虑砂轮的适用情况。图5所示为砂轮一般选用原则,根据加工需求来选用适合的砂轮十分重要,使用合适的砂轮将有效避免砂轮破损的情况,有效降低工件的报废率。
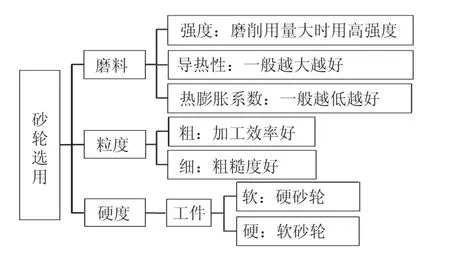
图5 砂轮一般选用原则
为适应逐渐提高的磨削要求,需要不同形状的砂轮,常见的砂轮形状有平形砂轮、蝶形砂轮和碗形砂轮[22],图6 所示为常见的砂轮形状[14],不同规格形状的砂轮常组合成1个砂轮组。
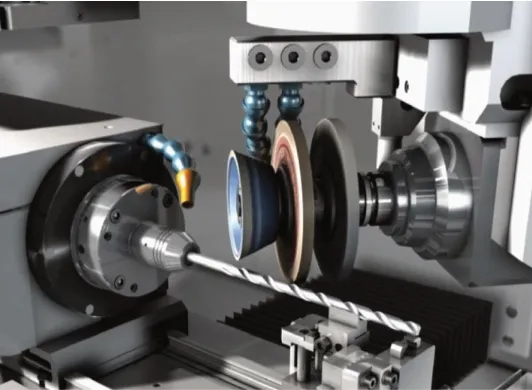
图6 常见的砂轮形状
除了选用合适的砂轮外,对砂轮的磨削性能研究也十分必要。Deng 等[23]使用纳秒级的紫外激光束在金刚石晶粒砂轮颗粒的表面上切割微米级的凹槽,如图7所示,该工艺旨在减小磨粒与工件间的接触面积,并增加砂轮表面上有效磨削刃的数量,以改善磨削后工件的表面质量。Wang等[24]认为使用金属结合金刚石砂轮进行超精密磨削是明智的选择,实验结果表明,金属结合金刚石砂轮对复杂零件的小凹面进行超精密磨削加工后,工件的表面粗糙度有所改善,工件磨削过程如图8所示。
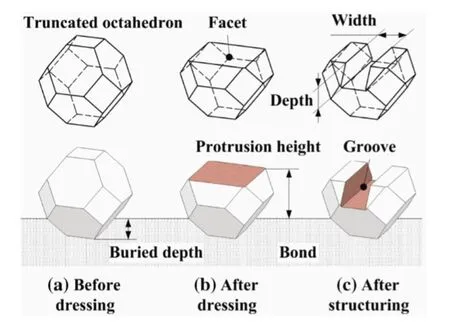
图7 激光切割后的颗粒形状

图8 工件磨削过程的运动链
对于具有复杂曲面的工件,常常也需要形状复杂的专用砂轮进行磨削加工,这使得砂轮的制造及刀具的加工成本大大提高。Wasif等[25]提出一种简单易行的优化磨削砂轮沟槽的方法,使用具有简单几何特征轮廓的砂轮替代具有自由几何形状的砂轮来加工立铣刀,并为磨削沟槽提供了精确的几何模型,如图9 所示[25]。这项工作不仅提高了立铣刀的制造精度,而且减少了具有复杂轮廓的专用砂轮的需求,也降低了生产成本。朱卫仁[26]设计了一种段差用新型砂轮,该砂轮为上宽下窄的蝶形砂轮,砂轮工作层与砂轮基体宽端固定,具有一定的斜角,此类砂轮无需人工手摇出段差,可满足不同工况下的精度要求。

图9 砂轮轮廓线
砂轮在磨削加工过程中的磨损会大大影响工件的加工精度和表面质量,因而很有必要开发磨削砂轮磨损的在线检测系统。母德强等[27]利用误差分离技术建立了砂轮轮廓磨损的在线检测系统,在线测量结果显示,砂轮修正后外圆轮廓和磨削达6 mm 的外圆轮廓的均方差分别为0.0302 和0.0076,砂轮磨削后的均方差值若小于给定均方差阈值则被看作钝化,因而该系统可准确测量砂轮的初始轮廓和钝化轮廓,对预报钝化时间和提高加工效率具有实用价值。刘森等[28]利用钛合金磨削加工时的振动信号和走刀次数实现对砂轮状态的在线监测,通过实验确定振动信号均方根阈值为0.008,走刀次数阈值为11,并基于此用Labview 设计了砂轮磨损监测软件,该软件实现了砂轮磨损时磨床能够自动停机和报警的功能。Krishnan 等[29]建立了隐马尔可夫模型(HMM,Hidden Markov Model),利用磨削过程中捕捉到的声发射(AE)信号来预测自动进给表面磨削过程中的砂轮状态,将砂轮分为“锋利”、“中等锋利”和“磨损”3种状态,每种状态对应不同的HMM 模型,在用于测试的117 个序列中,根据砂轮状态正确分类了110 个序列,只有7 个序列被错误分类,这证明了HMMs 对砂轮状态有优秀的预测能力。
3 五轴磨床数控系统的研究进展
五轴磨床的数控系统是整个磨削加工过程的“控制中枢”,是各个工步紧密配合、实现复杂工艺的关键。除了实现高效、高精度加工外,数控系统还要求有较低的学习成本,可减少培训学习数控软件的时间,降低加工误操作的次数,从而提高企业加工效率及降低制造成本。五轴数控系统相较于一般的机床数控系统,其开发难度大、研发成本高。目前主流的五轴数控系统主要来自德国、日本等国家的厂商,但是近年来,也不断有国产五轴数控系统的推出,渐渐填补了国产五轴数控系统的空白。
开放式数控系统(ONC, Open Number Control)是可以让不同应用软件兼容运行,具有标准的软件用户界面,提供相关功能工具的系统[30]。表4 所示为2 种主要的数控系统[31]。

表4 2种常见数控系统
数控系统一般由数控硬件系统和数控软件系统组成,软件部分有用户接口模块、开放式数控应用系统、数控应用驱动包、数控接口模块;硬件部分有伺服控制块和驱动装置[32]。各个模块负责不同的功能,其中,数控接口模块实现与硬件部分与软件部分的连接,是软硬件连接枢纽。一个好的数控系统,一定是易于操作和学习的,而用户接口模块就是实现人机交流的重要窗口。
有关数控系统的研究中,Rowe[33]早在1996年就提出将智能技术应用于计算机数控系统(CNCs),Adam 等[34]则对先进加工数控技术进行了综述,描述了数控系统在先进制造中的应用。
目前,开放性和智能化是计算机数控系统(CNCs)的发展趋势,Liu等[35]设计了一种基于Windows、TwinCAT(自动化技术)和.NET的多轴机床开放式数控系统结构,图10所示为基于TwinCAT 和.NET 的多轴机床开放式数控系统结构[35],其中TwinCAT(自动化技术)和.NET分别执行实时任务(如插值、实时刀具补偿等)和非实时任务(如代码解释器、离线刀具补偿等),且这两类任务中的数据之间可以快速交换,该结构有效提高了数控系统的开放性、可扩展性和效率。

图10 基于TwinCAT和.NET的多轴机床开放式数控系统结构
Xu 等[36]研究了基于PC 和运动控制器的开放式数控系统,设计了一个同心环结构的系统管理软件开发模型并基于该模型开发了高度集成,低耦合的系统管理软件;最后采用基于运动控制器二阶插值的算法、三次b样条曲线和弦分割插值算法进行粗插值,通过实际应用后证明该数控系统可有效运行。为提高开放式CNC 系统的加工速度和精度,Li 等[37]将EtherCAT 技术应用到开放式数控系统中,详细描述了Ether-CAT 的相关设计,采用双处理器的硬件结构和层次化、模块化的软件设计,最后通过工件加工实验验证了数控系统的性能。Correa等[38]开发了一种通用的、开放的体系结构,该结构可用于开源电子数控系统的设计并提供了具体的实验信息,实现更多计算资源、更平稳的运动和更大进给量的CNC 系统。杨欣雨等[39]基于运动与自动化通用控制器(UMAC,Universal Motion and Automation Controller)和.NET 平台,设计了五轴磨床数控系统及软件,该软件能进行系统用户个性化管理和参数调节等实用性操作。有关机床开放性数控系统的研究越来越多,要达到开放性的要求,就必须考虑数控系统的兼容性和扩展性,保证研究的数控系统达到一定的精度要求和加工速度要求,此外,也有必要对数控系统容易发生故障的薄弱环节进行研究。罗静等[40]在分析了大量的故障数据之后,借助重要性测度模型确定伺服驱动系统为数控系统的薄弱子系统,通过JAVA程序运行结果,判断出伺服驱动系统中的电动机为主要薄弱部件,这种递进式的诊断方法能较为全面地分析故障原因且能精确到具体部件。
4 五轴磨床检测系统的研究进展
4.1 机床状态检测系统
在实际生产加工中,数控机床的可靠性是重点关注的指标,尤其在大批量生产过程中,因为机床的可靠性,对生产效率、成本和产品质量有重要影响。一旦机床发生了故障,导致大批量的生产中断或不能生产符合条件的产品,其损失不仅在于零部件更换和机床维修,更多的是生产停滞、不能如期交货等方面的损失。因此,在机床发生故障前就对故障发生做出预判非常重要,这就需要在机床上应用机床状态检测系统。
近年来,越来越多的学者开始从事机床状态检测系统的研究。沈捷[41]认为CTM 系统是一种较为有效的机床状态检测系统,可以为机床生产运行时,提供故障预判,及时向工作人员提示机床状态,尽早对机床进行检修。机床检测系统可根据不同的方法进行构建,Li等[42]提出了一种具有4层结构的CPS 数控加工过程智能检测平台,图11 所示为数控机床数据采集系统架构,实现了对数控机床的实时监控和三维显示,即设备运行状态可通过监控界面显示,在第一时间得到故障信息并传递给相关技术人员。
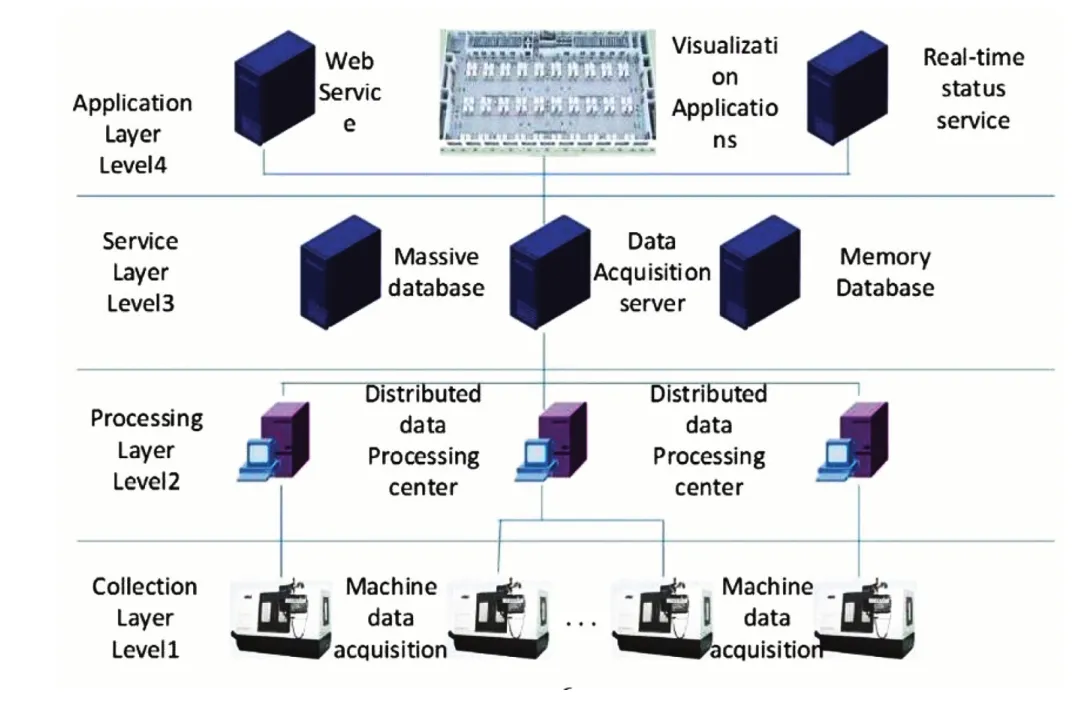
图11 数控机床数据采集系统架构
Jia 等[43]基于进给驱动系统动力学的统计特性提出了一种针对机床进给驱动系统状态的检测方法。在这种方法中,根据进给驱动系统加速或减速运动情况,由惯性产生的自由振动响应来估算模态参数,分析其动力学的长期统计特性,并进一步研究了它们对加工过程的影响。结果表明,模态参数的方差随螺杆磨损的增加而增大,这将显著加快刀具的磨损速度。因此,可通过模态参数的统计特性来精确地监视机床进给驱动系统的运行状况。Goyal等[44]提出了一种旋转机械元件状态监测的非接触式传感器优化配置(NC-OSP)方法,以获得与机床动态特性相关的有效信息,该测量系统如图12所示[44]。实验结果表明,特征频率的FFT 振幅和时域RMS 值是控制响应参数最有效的输入变量,其次是轴速度、载荷和入射角。最优模型提出的响应在入射角为8°时达到最大负载和速度,该结果已通过实验验证,可利用RSM跟踪非接触式传感器的位置,用于轴承状态监测以及其他复杂的机器。

图12 非接触式测量系统
Verl 等[45]认为可以通过应用无传感器自动状态监视(SACM)来减少机床系统的停机时间,其测量原理如图13所示[45]。这种方法基于位置控制驱动器中的位置、速度和电机电流等可用的信号,开发和测试新的SACM 算法。该算法是基于将机床当前的特征参数与全新机床的默认参数进行比较,实现机床状态的自动检测。Xing 等[46]提出了一种基于体积误差(VE)、矢量相似性(VSM)和指数加权移动平均(EWMA)控制图的机床精度状态监测方案,通过模拟机床误差数据和机床测试来验证监测方案的有效性,结果表明,VSMs 能有效地提取VEs 的特征,而VE 是对监测机床精度状态有意义的量,可以反映机床误差引起的精度变化。

图13 测量装置原理
随着相关传感器和芯片的发展,机床状态检测系统发展也很迅速。目前的研究主要关注机床故障的检测方法及其优化,未来的研究方向应关注故障的早期检测,使检测系统能显示较完整的故障信息并提供解决方案。
4.2 在线检测系统
高精密数控机床设备具高精度、高效率的优点,有赖于数控机床在线监测系统的发展,因为在数控机床上应用机床在线监测系统,用计算机监测程序替代传统使用人力进行检测的方式,在提高数控机床加工效率的同时可降低人力成本。在线监测系统是一种借助计算机系统,对监测对象进行实时监测并分析做出响应的监测系统[47]。五轴联动磨床作为一种具有高精度、高性能的先进加工设备,也需要自主研发适用的在线监测系统,进一步提高其加工能力和加工效率。
4.2.1 在线检测系统的构成
数控机床在线检测系统一般有2 类,一是只利用程序,使用时直接调用需要的基本宏程序;二是需借助计算机且根据需要开发宏程序库[47]。表5所示为数控机床在线检测系统的结构和各结构的功能[47]。数控机床的在线检测是系统内各部分各司其职,共同实现的,各个部分缺一不可,相互影响,只有各个部分都有满足要求的运行状态,才能加工出符合加工要求的工件。

表5 在线检测各组成部分的功能
4.2.2 在线检测系统原理
零件的在线检测一般借助计算机辅助实现,计算机向机床数控系统输出检测主程序,数控系统接收计算机的程序指令后,驱动测头测量零件,测量结果经转换器又传回数控系统,计算机提取数控系统中的测量结果,经过分析、计算和补偿等,得出测量最终结果[48]。图14 所示为一种检测零件的流程。

图14 零件检测的一般流程
得到零件的测量结果后,计算机需要对该结果进行判断,若满足加工需求,则不需要继续加工该零件;若此次加工未能达到加工要求,则需要再次进行加工。
在线检测系统的研究中,声发射技术是应用于检测系统的一种常见且有效的技术。Zhao 等[49]为提高磨削过程的安全性和高效性,利用声发射(AE)技术实现了各种磨削状态的检测,基于支持向量机(SVM)设计了磨削状态分类装置,实现了磨削状态的在线智能检测。马豪等[50]使用数字信号处理芯片(DSP)、ARM处理器和声发射(AE)传感器,设计了一种磨床实时检测系统,系统结构如图15所示,通过声信号的实时采集和显示,实现对磨床加工的控制,通过对轴承进行完整地磨削试验,验证了该系统对磨削过程有很好的监控作用和兼容性,能适配国内大多数数控磨床。
朱健等[51]设计了一种针对可转位刀片尺寸测量的在线监测系统,该系统不仅可对工件尺寸进行测量,还可对工件装夹位置进行测量,通过专用的测头对工件进行接触式测量后将测量数据导入系统的计算模块,借助PLC 实现对工件的自动测量和分析计算,在线测量误差不超过5 μm。卢玉成[52]提出一种刀具在线测量的方法,如图16所示,在磨削刀具时,对刀尖的纵向位置、刀体螺旋槽、刀具直径等进行测量,并根据测量数据,计算得出刀具的加工参数,生成刀具加工程序,实现对刀具的自动测量和修磨。

图15 磨床实时监测系统总体结构图

图16 刀具修磨参数测量
为了提高制造过程的高效率和高质量,数控机床具备工件自动定位和测量的功能是当前的发展趋势。由于传统的工件测量是接触式测量,难免会对工件造成一定的损伤,因此,利用3D扫描技术实现工件的非接触式测量受到更多的关注。Chang等[53]开发了一套利用灰码结构光辅助数控机床工件在线定位的3D扫描系统,实验结果表明,该系统能使数控机床有效降低工件的定位时间。徐淑婷[54]利用线激光设计了一种非接触式的数控机床在机测量系统,其无线采集模块如图17 所示。该系统可收集测量数据、数据预处理和转换坐标系,基于Labview 使用G 语言设计了在机数据采集与处理的软件,经实验得知,线激光在机测量原始数据冗余且精度不高,数据点达32000 个,坐标系转换最大误差为1.730 mm,在优化处理后,数据点降至16050 个,最大误差降为0.168 mm,很大程度地提高了数据的精简性和精确度。
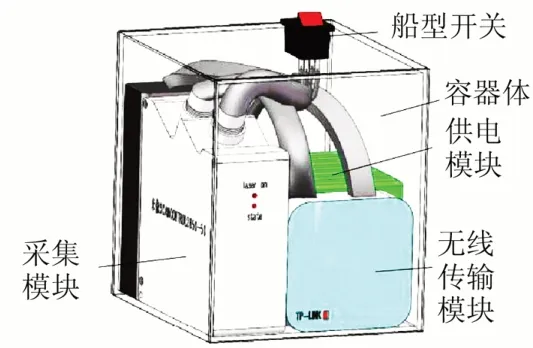
图17 测量系统无线采集模块
4.2.3 数控机床在线检测技术发展趋势
(1)满足个性化需求、实现智能化制造。个性化包括操作个性化和加工个性化,个性化操作更注重人的选择,降低操作难度;加工个性化是满足更多具有个性化的需求,对于小批量的产品依旧保持较高的加工效率。而智能化是发展的大趋势,目前人工智能(AI)发展迅速,利用AI可以提高数控检测技术的检测能力,实现机床诊断-修复智能化。
(2)与网络紧密连接,提高系统开放性。如今5G发展进入快车道,势必会大大提高在线检测系统的性能,利用5G的特点,可对机床实行远端操控等先进控制方式。更加开放的数控系统,可以根据需求,对数控系统进行优化,满足编程、操作等需求。
(3)技术更加统一化。如今的在线检测系统五花八门,各个厂商独立工作,缺乏技术间的结合与联系。在这个“万物互联”的时代,只有各类检测系统的技术趋于统一化,提高检测技术与数控系统和控制系统的兼容性,才能更大程度推广和发展在线检测系统技术。
5 五轴磨床磨削工艺的研究进展
5.1 直接驱动技术
直接驱动技术是指将力矩电机直接与机床主轴连接,电机直接驱动机床主轴,实现对负载的直接驱动,完成执行部件的工作[55]。传统的主轴驱动方式是电机通过一系列机械传动元件(齿轮组、蜗轮蜗杆和联轴器等)将动力传给主轴,使主轴转动。如今,直接驱动技术广泛应用于各类数控机床中,而五轴联动磨床采用直接驱动技术,可替代传统的使用机械传动装置的传动方式,使结构更加精简的同时,提高传动精度和降低传动响应时间。
直驱技术在应用时也需关注一些接口问题,丁云飞等[56]提出五轴磨床上应用直驱技术时的接口问题,并以KBM力矩电机为例讲述了直驱技术的优势,阐述了直驱技术的应用,有效提升了传动速度和传动精度,且大大降低制造成本。陈宝华[57]分析了直驱技术在五轴数控磨床上的应用特点时,同样提到其接口问题,他认为直驱技术连接的温度需额外关注,包括温度传感连接和冷却连接,温度的过冷或过热都会严重影响加工的精度。胡秋等[58]设计了一种采用直驱技术驱动的精密回转工作台,这类工作台可广泛应用于各种多轴联动、超精密机床且系统精度达2.5",该研究总结了直驱式回转工作台的关键技术和设计方案,对采用直驱技术的相关设计具有一定的参考价值。
若使用力矩电机直接驱动主轴,五轴磨床的主轴可实现无级变速,由于不存在齿轮等传动元件,故没有传动元件的磨损问题,这大大提高了五轴磨床的可靠性和耐用性。直驱技术在五轴磨床上的广泛应用,简化了五轴磨床的结构,不仅提高了五轴磨床的使用寿命和加工效率,而且大大降低了五轴磨床研发制造的难度。
5.2 多工步加工的后置求解方法
五轴联动磨床往往需要多个工步才能完成对刀具的加工,这个过程涉及砂轮自动更换,易产生砂轮位置与刀位相互干涉的问题。因此,需要对五轴联动磨床进行多工步后置处理,得到有效的后置求解方法,使五轴磨床在实际加工中可以流畅、高效运行。一台五轴数控工具磨床一般有多个砂轮且若干个砂轮为一个砂轮组,可用不同类型的砂轮(平行砂轮、蝶形砂轮和碗形砂轮)作为一个组合。
要得到有效的后置求解方法,首先要定义砂轮组的安装位置和安装方向,除此之外,还要求工件坐标和机床坐标相互统一。图18 所示为一种磨床砂轮库,针对不同的工件,高效合理地调用砂轮库内的砂轮组对工件进行加工。高效的后置求解方法是程序指令与机床设备紧密联系的重要一环。

图18 一种磨床砂轮库
在五轴数控加工后置求解的研究里,范清华[59]以一台五轴联动加工中心加工涡轮叶片为例,研究五轴数控加工后置处理的实现方法,他认为在得到旋转轴的配置关系后,再结合机床实际结构,也可有效得出其他双转台机床的后置处理方法。李乐[60-61]对五轴工具磨床的后置求解研究中,在对五轴数控加工后置处理方面进行大量的调研后,得到五轴磨床运动量在不同坐标系下的统一求解,并设计了磨床后置处理软件。刘明明[62]对五轴磨床进行平动运动求解和旋转运动求解后,结合加工的刀位数据,得出磨床后置处理的算法和程序,实现对五轴磨床的后置处理。张太林等[63]通过建立机床运动创成函数,求解得出各旋转轴和平移轴的运动量,完成从机床到工件的坐标系转换,从而得到五轴工具磨床后置处理算法,提高了五轴工具磨床后置处理的通用性。
6 结束语
五轴联动工具磨床等高精密加工设备的研发代表着一个国家制造生产能力,拥有自主研发的高水平五轴联动工具磨床设备,可打破工业生产中的许多桎梏。本文介绍了国内外五轴联动工具磨床研究现状,对国内外五轴磨床主要厂商产品和数控系统进行了对比分析;并介绍了五轴工具磨床的关键结构和功能、数控系统、检测系统以及磨削工艺的研究进展。得出主要结论如下。
(1)国内外五轴磨床研究现状方面,全球范围内著名的五轴磨床设备制造商主要在德国、瑞士和澳大利亚等国家,国内也有台州北平机床、武汉机床厂和大连科德数控等公司有制造五轴磨床的能力,在加工精度和效率等方面与国际领先水平仍有一定差距。
(2)在五轴磨床关键结构研究进展方面,介绍了五轴磨床的关键结构,如工作台、磨削砂轮等,并叙述了相关的研究进展。五轴磨床工作台、砂轮、进给机构和自动上下料等关键结构的相关研究大多基于实际应用问题,提出改进方案或创新设计,有助于认识五轴磨床相关结构和对其进行研究设计。
(3)在五轴磨床数控系统研究进展方面,介绍了数控系统的类型和组成,罗列了国内外数控系统的代表型号和主要性能。目前,许多学者针对数控系统的开放性做了相关研究,分别基于不同的运动控制器(如UMAC 等)和平台(Windows、.NET等)开发开放性数控系统。未来对于开放性数控系统的研究应该更加注重兼容性和扩展性,而数控系统的运行速度和加工精度要继续提升。
(4)在检测系统研究进展方面,阐述了机床检测系统功能对生产的作用,包括机床状态检测和工件检测两方面。在机床状态检测方面,目前的研究主要关注机床故障的检测方法及其优化,未来研究的方向应要关注故障早期的检测,现实故障信息的完成显示并可提供相关解决方案。在工件检测方面,许多学者利用AE技术来设计检测系统。对于非接触式的工件测量系统,如基于3D结构光扫描技术的测量系统的研究还较少,应加以研究,提高工件定位精度和速度,避免工件的测量损伤。
(5)在五轴磨削工艺研究进展方面,主要介绍了直接驱动技术在五轴磨床中的应用和五轴磨床后置求解方法。五轴磨床应用了直驱技术具有许多优势,但在应用时还需关注接口问题,该问题的优化仍需进行更多的研究。目前已有关于五轴磨床后置处理的求解过程和方法的研究并提出后置处理的研究建议,但有关后置处理软件的设计及其兼容性和拓展性的研究还较少。
五轴联动磨床凭借其高精度、高加工性能等优异特点,可以顺应复杂刀具等工件的加工需求,在高端制造业有广阔的前景。目前,物联网、人工智能以及5G正在迅速发展,将大范围带动周边产业的协同发展,未来五轴联动工具磨床的发展应寻求与上述产业的有效结合方式,促使五轴磨床向智能化、信息化方向发展,为先进制造业的发展打一剂强心针。
