基于深度学习的机器人电气故障检测与诊断研究
2021-01-11陈公兴
陈公兴
(广东科贸职业学院 信息与自动化学院,广州510430)
随着机器人应用领域的不断扩大以及电气控制技术的发展,对机器人电气设备的可靠性和稳定性提出了更高要求。机器人电气设备长期在极端工况下工作,导致电气设备的故障差异性较大,检测难度较高,因此相关的机器人电气故障诊断方法研究受到人们的极大关注[1]。
对机器人电气故障的检测与诊断,是建立在对电气设备的故障样本信息分析和特征融合的基础之上,以此提高机器人电气设备的故障分析和诊断能力[2]。到目前为止,已经有很多相关领域的专家对机器人电气故障诊断与检测方法进行了深入研究,也取得了较好的研究成果。例如,文献[3]中提出基于神经网络观测器的机器人电气故障检测及诊断方法,但是采用该方法进行机器人电气故障检测的准确率低;文献[4]提出基于专家系统的机器人电气故障在线检测方法,但该方法进行机器人故障检测的时间较长,难以达到理想的应用效果。针对上述问题,在此提出了基于深度学习的机器人电气故障检测及诊断方法。
1 机器人电气故障样本数据采集和故障特征分析
1.1 样本数据采集
为了实现基于深度学习的机器人电气故障检测与诊断,首先需要分析机器人电气设备的谐振回路,以回流功率和有功功率为约束因素,对机器人电气设备的异常数据进行采样[5]。
假设,机器人电气设备的高频变压特征分布序列{x(n)}为零均值的k阶正态随机序列,构建机器人电气故障诊断的自适应学习模型,通过串联谐振阻抗分析方法[6],求得机器人电气故障数据样本序列为d(s),通过高频变压振荡控制方法输出机器人电气故障的自相关函数为

式中:N为高频变压振荡控制稀疏系数;C(r)为自适应学习模型。
在稳态条件下,结合机器人电气故障的自相关函数,得到机器人电气设备的谐振回路如图1 所示。
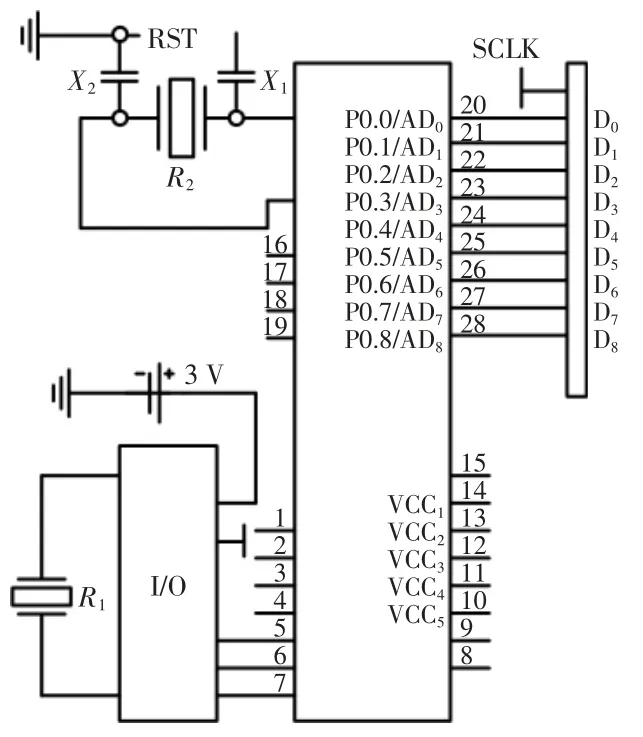
图1 机器人电气设备的谐振回路Fig.1 Resonance circuit of robot electrical equipment
在开关弧度周期内,机器人电气故障参数的矢量模型为s(t)=[s1(t),s2(t),…,sq(t)]T,以及干扰矢量为n(t),采用谐振回路振荡控制方法,得到机器人电气故障的跳变序列[7],即

式中:uji为谐振回路振荡系数;wi为跳变参量;si为开关弧度周期。
假设,机器人电气设备双向谐振类变换特征样本集为dk,则机器人电气设备的故障节点的负载范围Ψ(ω)为

以回流功率和有功功率为约束因素,在故障节点的负载范围内结合深度学习分析方法,得到机器人电气故障信息数据采集输出为

根据上述分析,完成机器人电气故障样本数据采集,得到故障样本信息,以便后续故障特征分析。
1.2 故障特征分析
根据上述谐振回路分析和数据采样结果,将机器人电气设备的谐振电感和谐振电容作为辨识参数进行机器人电气故障差异性特征挖掘,提取能够反映机器人电气故障属性的特征量[8]。
采用自适应滤波方法进行机器人电气故障数据分析[9],在此基础上,利用比例-重复控制方法得到的谐振电感为supt(D),谐振电容为numt(D)非线性负荷工况下的机器人电气故障的差异性特征分布为

式中:δ 为电压和频率下垂系数。
对机器人电气设备的输出电压和负载差异性故障特征进行融合处理[10],结果为

式中:u(t)为电流;ωc为谐振电流极性。
在此基础上,对一个开关周期内的电压和电流进行分析。假设,输出的机器人电气故障特征的谱序列为hi(t),机器人电气故障畸变序列为zi(t),在稳态条件下电压和电流的波束振荡序列为

式中:φi(t),oi(t)分别为机器人电气设备谐振回路所承受的电压、电流。
采用开关频率谐振分析方法再次对机器人电气故障数据进行融合处理后,得到故障样本的波束震荡序列的模糊度特征分量为

采用谐振电流极性不变性理论[11],得到机器人电气设备输出的振荡特征分量为

式中:mk为输出机器人电气故障的统计特征量;εk为标准差。当Xα(m)=x(m)时,对开关周期内的电压进行融合处理。
在此基础上,通过模糊度特征匹配的方法进行机器人电气设备统计特征序列的分析结果,从而提高机器人电气设备的电气故障检测及诊断的质量。
2 电气故障检测与诊断
2.1 故障特征提取
利用PI 调节器进行机器人电气故障信息反馈调节,结合故障信息融合分析方法进行机器人电气故障特征提取和自适应寻优控制。
以机器人电气设备的开关频率谐振频率比为基础,计算故障样本序列检测的标准差和均值函数分别为


式中:xk为开关频率谐振频率比;η 为故障样本序列变化系数;f(x)为故障样本序列检测函数;E为故障情况下开关频率谐振频率。
根据谐振回路所承受电压的边界条件进行寻优控制,得到机器人电气故障信息聚类输出为

式中:Mk为谐振回路所承受电压的边界条件;Ei为电气故障信息聚类模型。
采用傅里叶分析方法进行机器人电气故障信息融合,输出为

式中:nj为非线性负荷变化特征参量;Aj为故障信息特征融合度[12]。
初始化电流和电压相位[13],结合机器人电气故障特征数据的时滞分布序列提取机器人电气故障特征,其中时滞分布序列如图2 所示。
根据机器人电气故障特征融合与时滞分布序列,构建特征提取模型。即
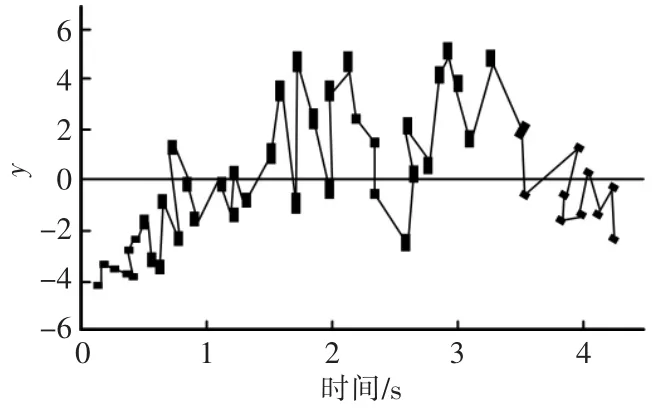
图2 机器人电气故障数据的时滞分布序列Fig.2 Time delay distribution sequence of robot electrical fault data

2.2 基于深度学习的故障检测与诊断
在完成以上分析的基础上,结合深度学习函数对机器人电气故障进行检测与诊断。在时间窗口t内进行机器人电气设备的鲁棒性检测,结合故障检测输出的有功和无功功率,得到输出电压的稳定误差为

式中:Pi为第i个机器人电气故障工况下的电压和频率下垂系数;Pti,j为逆变器等效增益。
在功率-频率有差的调节下[14],根据稳定误差分析方法,得到机器人故障检测函数为

式中:xj(t)为机器人电气故障状态下的深度学习迭代函数;lj(t)为在机器人电压下垂控制参数。
在得到机器人故障检测函数的基础上,用ΔM′mn表示为第m种故障的第n个样本,得到用于机器人电气故障诊断的深度学习函数为

综上所述,通过对机器人电气故障样本数据采集、故障特征分析和提取,从而得到故障检测模型以及机器人电气故障诊断的深度学习函数,实现机器人电气故障检测及诊断[15],提升机器人电气故障检测及诊断结果的可靠性。
3 仿真测试分析
为了验证所提出的基于深度学习的机器人电气故障检测及诊断方法在实现机器人电气故障检测中的应用性能,进行仿真实验测试。
设定输出谐波阻抗为50 Ω,开关频率为120 kHz,机器人电气故障采集的样本数为5000 个,故障特征采样的训练样本集为1500 个,测试样本集为3500个,电气设备的回流功率为250 W,根据上述参数设定,进行机器人电气故障检测与诊断。
机器人电气故障样本数据采集流程如图3 所示。
由图5 分析可见,本文方法进行机器人电气故障检测及诊断,机器人电气输出的相位和幅值具有相对稳定性。
测试本文方法、文献[3]方法、文献[4]方法的故障检测准确率,得到对比结果见表1。

图3 故障样本数据采集流程Fig.3 Flow chart of fault sample data acquisition
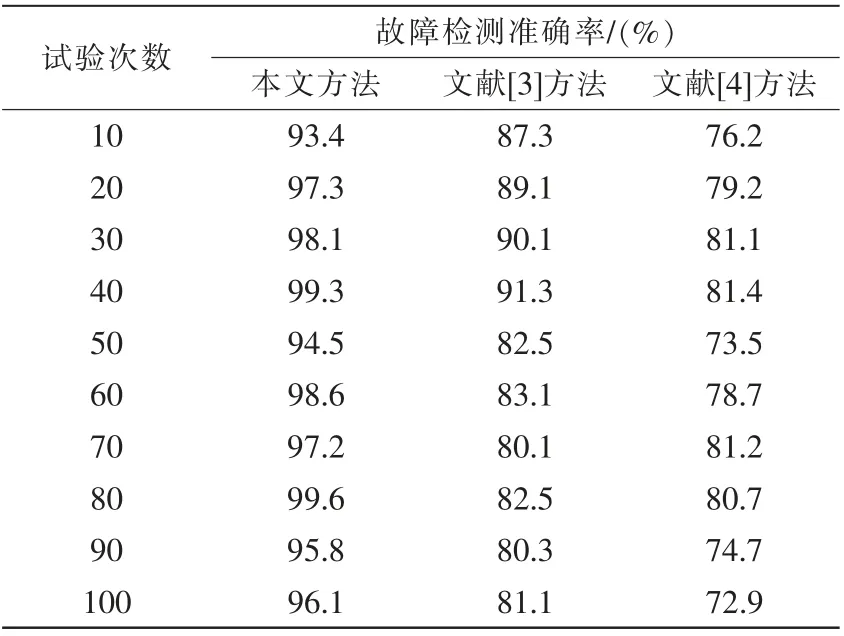
表1 故障检测准确率的对比Tab.1 Comparison of fault detection accuracy
其中,机器人电气设备的回流功率采样如图4所示。
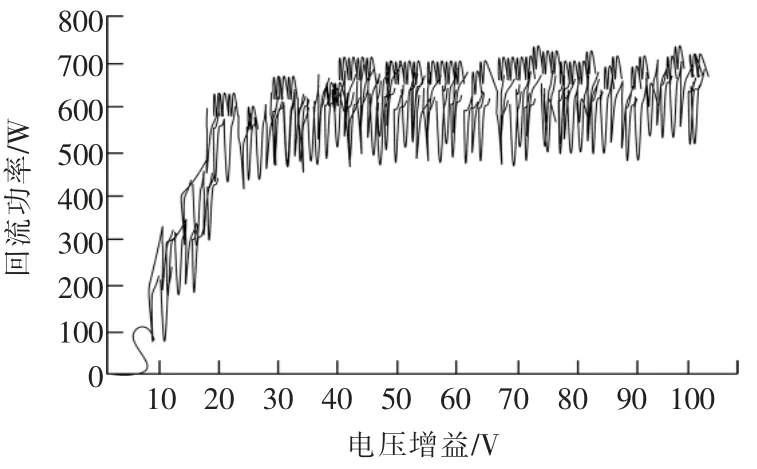
图4 机器人电气设备的回流功率采样Fig.4 Return power sampling of robot electrical equipment
分析表1 可知,本文方法进行机器人电气故障诊断的准确概率较高。
在上述试验的基础上,进行机器人电气故障诊断准确率对比,结果见表2。
以图4 的回流功率为测试序列,通过深度学习补偿,得到机器人电气输出的相位和幅值分布,如图5 所示。
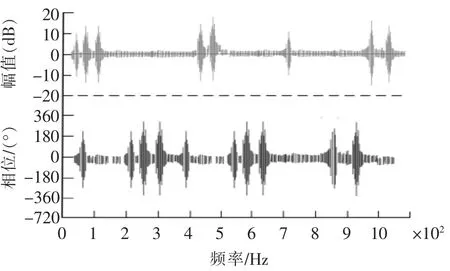
图5 机器人电气输出相位和幅值的分布Fig.5 Phase and amplitude distribution of robot electrical output
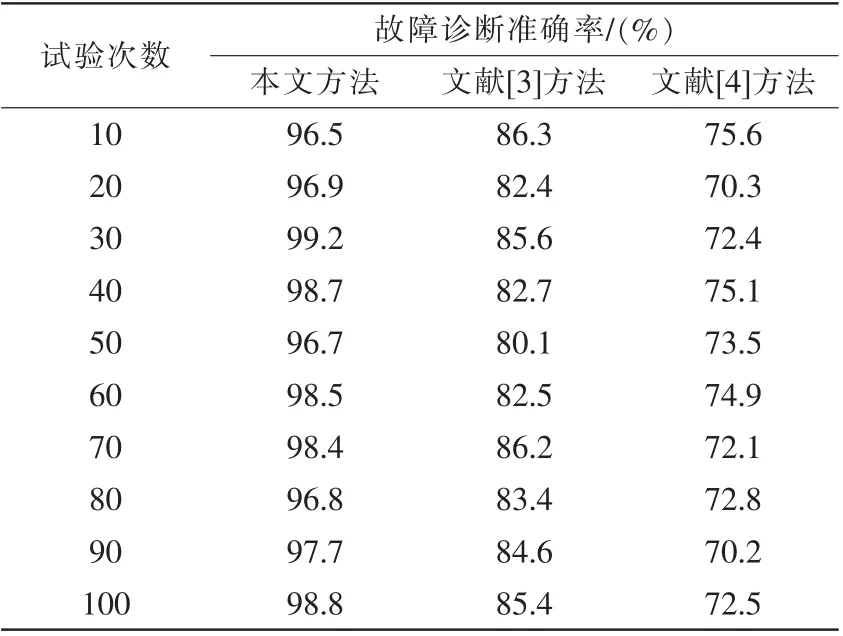
表2 故障诊断准确率的对比Tab.2 Comparison of fault diagnosis accuracy
分析表2 可知,采用本文方法进行机器人电气故障诊断的准确率高。
为进一步比较3 种方法的综合性能,进行了机器人电气故障检测时间与诊断时间比较,结果如图6 所示。
分析图6 可知,本文方法无论是机器人电气故障检测时间还是诊断时间均低于文献[3]方法、文献[4]方法,说明该方法可实现对于机器人电气故障的快速检测与诊断。
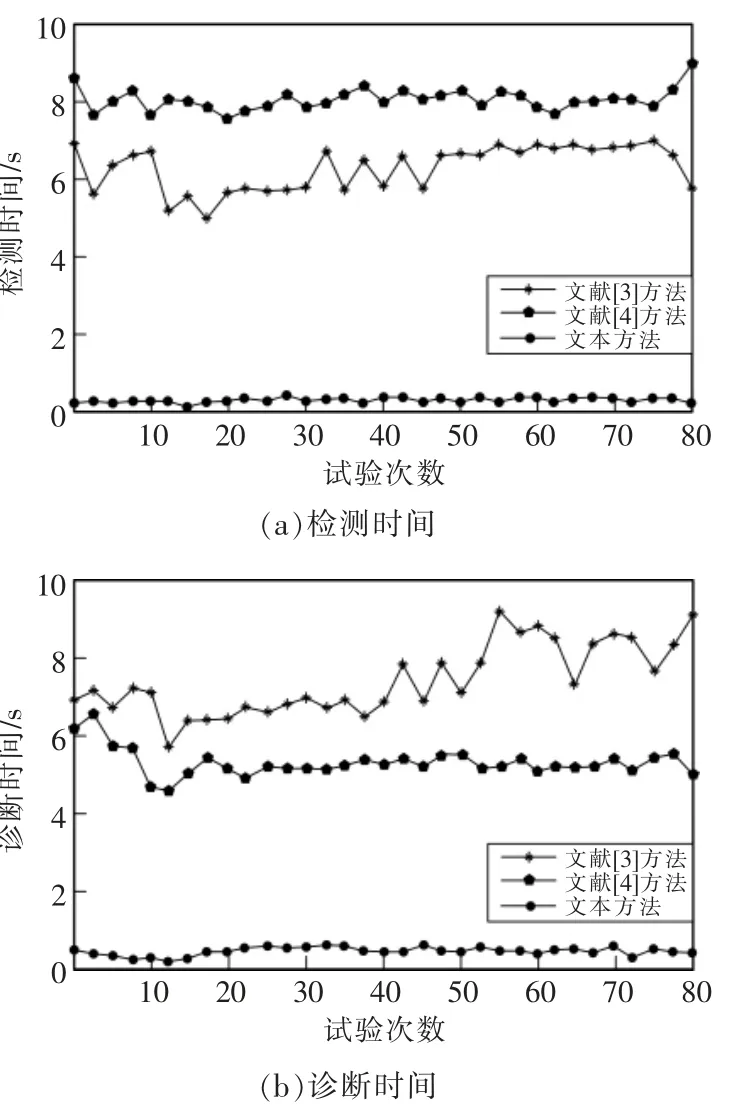
图6 不同方法的检测时间、诊断时间比较Fig.6 Comparison of detection time and diagnosis time of different methods
4 结语
为提升机器人电气故障检测及诊断结果的可靠性,提出了基于深度学习的机器人电气故障检测及诊断方法。构建机器人电气故障诊断的自适应学习模型,通过采用傅里叶分析方法进行机器人电气故障信息融合,提取机器人电气故障特征,从而得到故障检测模型以及机器人电气故障诊断的深度学习函数,以此实现机器人电气故障检测与诊断。分析得知,本文方法进行机器人电气故障检测和诊断的准确性较高,时间较短,可靠性较好,可以在实际中得到进一步推广与使用。
