基于模糊神经网络的污染环境安全评估方法研究
2021-01-11张宝峰朱均超
张宝峰,从 宇,朱均超
(1.天津理工大学 光电器件与通信技术教育部工程研究中心,天津300384;2.天津理工大学 电气电子工程学院天津市复杂系统控制理论及应用重点实验室,天津300384)
我国石油化工等第二产业在生产过程中会排放污染物,其包含很多有毒有害物质、易燃易爆气体、刺激性污染物。一旦现场发生了气体的泄漏安全事故,会形成许多高危污染场地,对此必须尽快恢复当地健康地貌,将事故引起的损失降到最低[1]。为保障现场的工作人员安全,评估现场气体排放区域安全程度,目前污染场地安全评估方法主要有模糊系统评价分析法、综合指数法、灰色系统的线性评价法、层次分析法AHP(analytic hierarchy process)、TOPSIS 法及人工神经网络等[2-4]。以上方法在场地安全评估中均具有较好的评估效果。考虑污染现场的实际情况复杂,气体权重比严重影响了评估结果,为提高污染分类的准确性,在此提出一种基于模糊评价的神经网络污染现场有毒气体评估方法。
考虑污染现场情况复杂,污染程度具有模糊概念,依据模糊综合评价构造GA_BP 神经网络模型,综合评判各污染区域安全等级[5-6]。该算法全方位寻找最佳匹配值,提高神经网络初始权重的精确度,规避神经网络算法的局限性[7],使指标的权重接近实际情况,得到最佳权重值,优化最大隶属度,其评价结果具有可信度。故在此将GA_BP 神经网络引入污染场地区域评价之中,对污染场地进行安全评价,划分危险等级。
1 污染现场评估模型
1.1 模糊综合评价
从当前空气质量测评法的特点上看,现有算法比较传统,不能很好地对针对模糊信息指定权重并有效评价,且污染场地受多种污染因子的影响,故在此采取了模糊信息综合评价算法,依据不同因子在场地空气污染中所产生的不同污染程度综合分析污染情况[8],利用模糊综合评价对污染场地各区域进行空气质量预评价,将模糊求解和处理的结果作为神经网络训练依据。
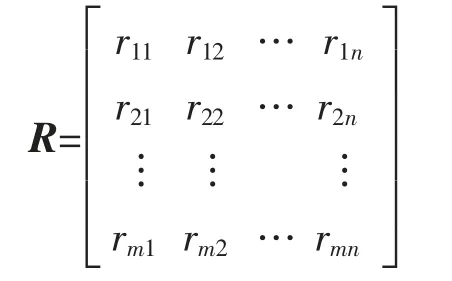
已知污染影响元素因子,其中元素ui(i=1,2,…,n)为污染因子,可以用作对研究目标对象的衡量指标。按项分类后,划分出相应评价等级标准U={u1,u2,…,um},V={V1,V2,…,Vn},如安全、轻度污染、重度污染等评语,可以是模糊或非模糊,但对V的隶属关系是明确的。从一个开始依据各自隶属的函数,进行单属性的因子模糊评价,建立模糊关系矩阵。即式中:rij为第i个因素ui对该场地的单因素评价。这些单因素评价构成了模糊综合评价的基础。鉴于各因子对环境污染的程度不同,因此在权重赋值时应该对这些污染元素作分类比较,对每个因子ui赋予一个适当的权值ai(i=1,2,…,n),构成权重集,确定评价指标权向量A。即

其中

式中:ai为因子ui的重要隶属程度。在此可以依据各污染元素与参考指标的差异程度进行排序,从而确定相应权重值。

为有效地展开模糊评价法,可以就各因子权重值再次做简化计算,即归一化处理:

模糊综合评价模型为

采用加权求和广义模糊算子M(×,+),即综合考虑所有因子的影响时,评价对象对评价集中每一个元素的隶属程度,依据隶属度最大选取原则得到最终评价结果。
1.2 模糊BP 神经网络
由综合模糊评价模型可以看出,客观合理确定指标的权重值是至观重要的。为此,建立了一种神经网络模型,训练各个指标权重,通过模糊综合评价的典型数据学习来优化权重精度,更加合理地分析场地各区域安全等级[9-10]。
在此所构造的神经网络结构如图1 所示。网络输入为X=(X1,X2,…,Xm)即m个输入;n个输出即评语标准。网络由输入层、隐藏层、输出层的三部分构成。输入层为逐组输入并可即时得到相应的评价等级,网络结构的隐层位于输入层与输出层之间。这一节点的权值wi可用于整体评价时各因子权重比例的优化调整。
输入层输入层的元素是污染因子评价指标。鉴于各项指标因次存在差异,在评价前应对其进行标准化,即各项指标权重值无量纲化处理。在此选择直线型无量纲化法,结合统计学相关公式,计算数据极差,从而完成对这些指标的标准化工作[11-12]。图1 中输入层有m个神经元,第1 层神经元的输入、输出为

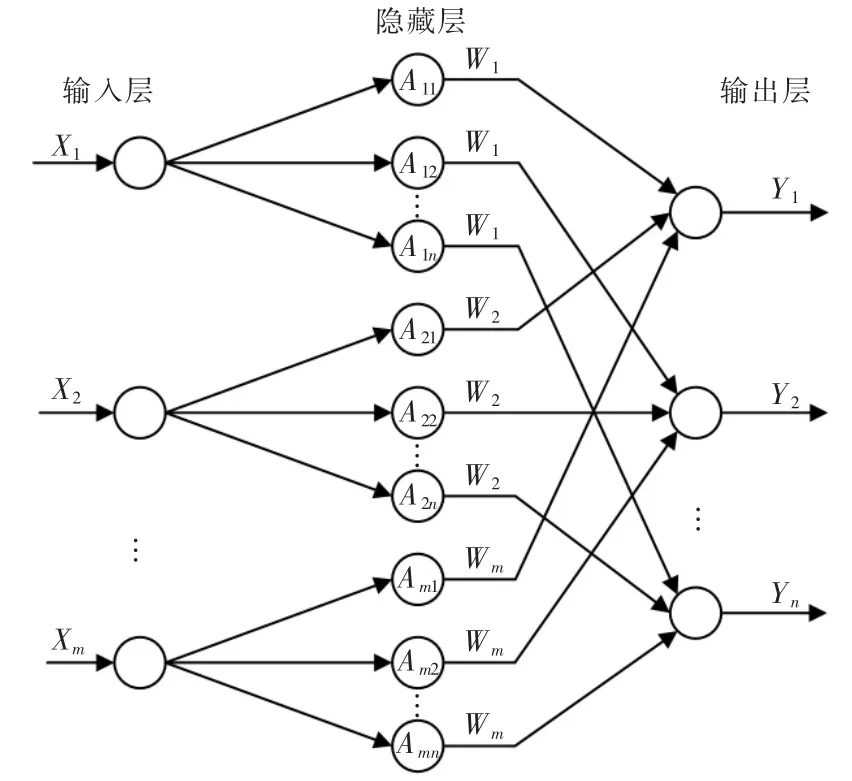
图1 神经网络结构Fig.1 Neural network structure
隐藏层对输入指标进行评语等级分化处理,即依据隶属度函数求每一指标值的隶属度值。图1中输出层有n个输出即评语标准,因此该层神经元为m×n个,在此选择三角隶属函数来表达隶属关系。设论域A为

其中n=4,则表示模糊子集为4 个,分别为“安全(NB)”、“轻度污染(NS)”、“中度污染(N)”和“重度污染(PS)”。其三角隶属函数如图2 所示,第2 层输入为

该层的输出为各标准的隶属度值,每个评价指标在隶属函数作用下的第2 层输出结果为

式中:Aij(x)为第j个评语等级隶属函数;O2ij为第2层各等级隶属度值,即表示二者的模糊关系程度。

图2 三角隶属函数Fig.2 Triangular membership function
输出层对向量X 进行总体评价,并依据相应评价标准,从而计算对应的评价向量。
第3 层输入为

输出为

其中

网络的学习过程利用反向传播算法,根据网络输入传递方向得出输出值,并对预测的输出值和该网络计算的输出值进行误差计算,再遵循反向原则,将此误差信息进行反馈。这样可以减小计算误差,并修改指标权重值。设有学习样本:

定义n个样本的误差函数为

其中

式中:E(a)为单个样本的训练误差;t(a)为样本的期望输出。在随机给出网络连接权重w后,沿着误差函数E随着w的负梯度方向逐步修正误差。设Δw为w的修正值,则

式中:η 为学习效率,取η 为(0,1)之间任意值。
由于神经网络会陷入局部最优,也就是在误差变换对其返回的信号的权重调整很小,故在此引进一个动量因子来帮助误差信号,使神经元的权重值重新震荡[13]。即

式中:a为动量因子,一般取a为(0,1)之间任意值。根据式(13)不断迭代,当输出误差小于系统设定值时,即训练好神经网络。
1.3 遗传算法优化模糊BP 神经网络
BP 算法在初始权重赋值时具有不确定性,局部指标权重会产生极小值[14],而采用遗传算法GA 可以提高网络初始权值的准确度,在初始权值种群内找到较好个体,使实际输出尽可能接近期望输出,避免权值初始化的随机性,较好地防止神经网络搜索陷入极小值,再利用BP 神经网络在较小解中搜索最优解,使检测样本分类更加准确。
GA 可以对各种群进行分类筛选,依据其适应能力的差异情况,采用交叉、变异等方式调整和优化种群,适应度高的个体幸存的可能性大,经过遗传算子反复迭代,最终选出符合条件的个体,即逼近最优解[15-16]。
依据神经网络结构确定个体长度,将网络所有权值进行实时编码,作为一组染色体,即

式中:wi为隐含层与输出层连接权重值。
为了最大化减小实际值与预测值之间的误差,采用遗传算法从权值编码组中选择最优个体,对神经网络各层权值进行初始化。将初始个体种群选择好后,使用训练数据集对神经网络进行运行检验,得到实际结果输出。在此将神经网络误差平方和的倒数作为适应度函数,即
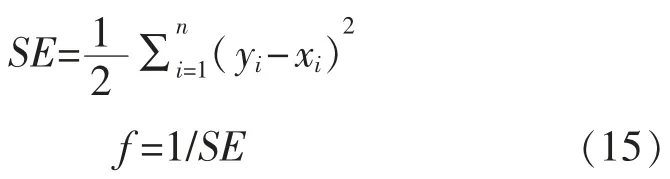
式中:n为节点数;xi,yi分别为第i个节点的预测输出、期望输出。
基因选择根据式(15)对个体进行匹配度训练,使用轮盘选择法,利用概率比例选择原理,每个基因中选概率Pi为

基因交叉运用交叉算子改善个体编码结构,从全局角度优化基因,通过式(16)选择基因Xi和Xk对其染色体的第j位,进行交叉操作,即

式中:b为常数,取值范围为[0,1]。
基因变异为提高算法局部搜素能力并维持种群的多样性,将父代的某基因点被一个均匀分布的随机数所代替,使其更加适应当前环境。新的基因点为

式中:Xmin,Xmax分别为初始基因的最小值、 最大值;r1,r2为[0,1]之间的随机数;Gmax为进化最大次数;g为迭代当前次数。
种群每进化一次,个体的种群适应度便随之提高,直至个体满足优化迭代条件,得到的最优解作为默认状态下的BP 神经网络的对应权重值。遗传算法优化神经网络流程如图3 所示。
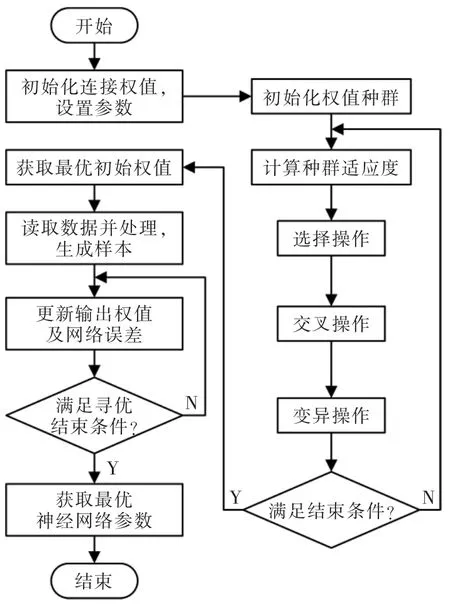
图3 GA 优化BP 神经网络流程Fig.3 Optimization of BP neural network by GA
2 系统试验与结果分析
2.1 系统结构及工作原理
为验证上述理论的可行性,在此搭建了移动式有毒气体检测平台,包括移动式多组分有毒气体采集终端和云服务器数据平台,其中采集终端安装到无人机等移动设备上。该结构借助嵌入式系统和现代信息网络技术,实现对污染现场有毒气体的分布态势实时检测。系统总体结构如图4 所示。

图4 系统总体结构Fig.4 System architecture
2.2 数据集的上传与显示
移动式有毒气体采集终端采集到的污染场地多种类有毒气体数据,通过GPRS 网络传送到服务器中,经数据接收协议处理后存入MySQL 数据库,为Web 端提供显示数据来源。用户通过浏览器网址即可获取气体数据,监测网页显示数据如图5所示。
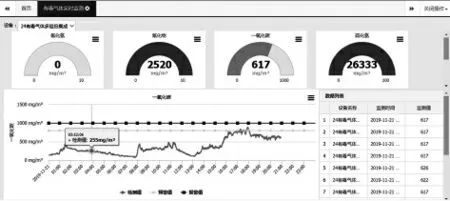
图5 监测网页显示数据Fig.5 Monitoring web page display data
2.3 污染场地评估试验及结果分析
利用移动式有毒气体检测系统采集的某污染场地有毒气体数据。随机抽选3000 组采样点数据用于构建训练集,并随机抽取20 组采样点用于测试,选择SO2,CO,NO2,H2S,NH3和HCN(氰化氢)共6 个污染因子指标作为输入的特征向量。根据现行的国家标准GB 3095—2012《环境空气质量标准》[17]和国内一些城市实际污染情况,将原标准机设为优、轻度污染、中度污染、重度污染等4 个等级。空气质量标准与污染物浓度限值对照见表1。
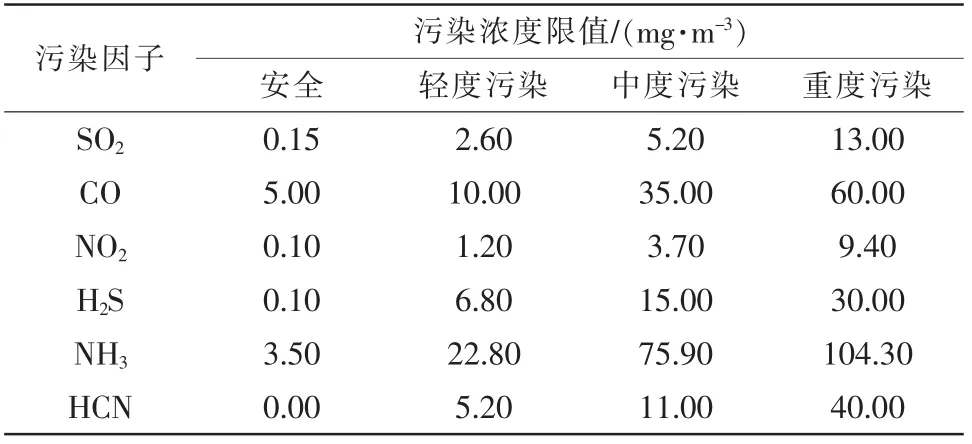
表1 空气质量级别对应的污染物浓度限值Tab.1 Pollutant concentration limits for air quality classes
随机选取100 组初始化权值种群,计算各权值适应度,初始化变异概率参数设为0.25,初始化交叉概率参数设为0.4,最高迭代次数设为500。利用遗传算子反复迭代得出最优初始权值。
使用已构建好的3000 组训练数据隐层与输出层的节点权值,相对应于输出层的输出分别为(1,0,0,0),(0,1,0,0),(0,0,1,0),(0,0,0,1);最优权值组学习效率η=0.1,动量因子a=0.3。神经网络经5000 次迭代后,误差值满足设定的精度要求。损失函数的变化如图6 所示,遗传算法优化前后神经网络收敛精度及速度变化如图7 所示。
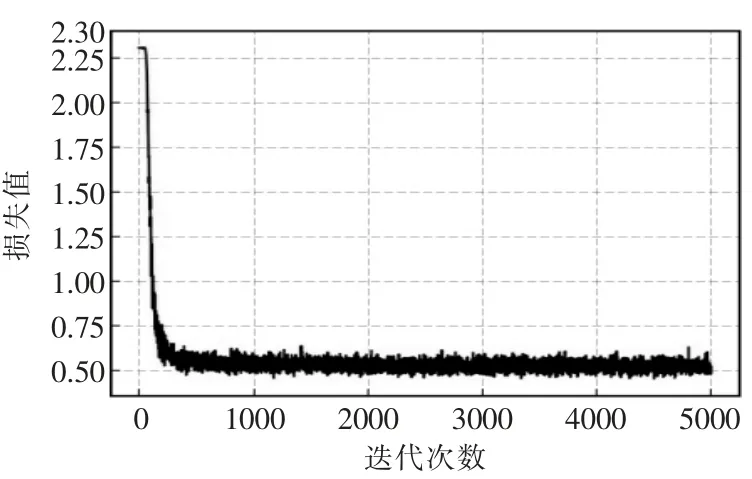
图6 损失变化曲线Fig.6 Loss change curve

图7 神经网络优化前后的对比Fig.7 Comparison of neural network before and after optimization
由图可见,模糊评价的GA_BP 神经网络有毒气体评估模型的损失值稳定并小于0.5;传统神经网络的收敛精度达到0.90,而GA_BP 神经网络的收敛精度达到0.95,且收敛速度在第25 次迭代时发生突变优于传统神经网络。
将随机20 组采样点通过模糊评价模型得到相应的评价结果,再利用模糊评价的GA_BP 神经网络有毒气体评估模型计算,其最大隶属度值见表2。评价结果比较如图8 所示。
依据试验结果,模糊GA_BP 神经网络有毒气体评估模型,可以避免完全依照数值来计算污染区域权重时,容易出现与修复工程实际情况不符的安全问题,其评价等级的最大隶属度更加准确,更加客观合理地分析和评价各类型污染区域的安全性,具有良好的科学工程技术性和应用价值。
根据移动式有毒气体检测平台为数据源,利用基于模糊评价的GA_BP 神经网络的污染场地有毒气体评估模型,仿真出某场地的污染三维分布,如图9 所示。

表2 最大隶属度结果对比Tab.2 Comparison of maximum membership results
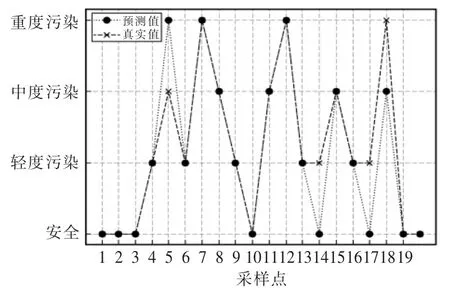
图8 神经网络模型试验结果Fig.8 Experimental results of neural network model
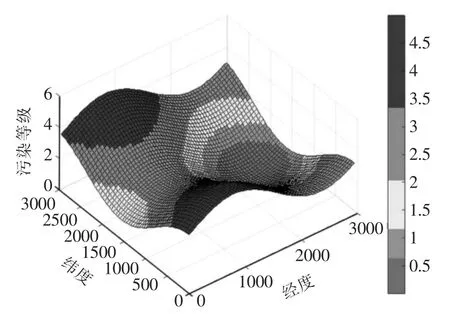
图9 污染场地三维分布Fig.9 Three dimensional distribution of contaminated sites
3 结语
所设计完成的移动式有毒气体检测系统,经测试证明,系统可靠,稳定性高。所研究的有毒气体高危污染场地评价模型,解决了污染现场工作人员的安全问题,基于模糊评价的神经网络的污染场地有毒气体评估模型具有计算复杂度低,评价准确,泛化能力高等特点,对污染场地修复,保障公共安全具有重要价值。
