基于自动化叠衣储衣装置的研究
2021-01-10蔡礼泽张佳诸葛智胡洲翔韦雄
蔡礼泽 张佳 诸葛智 胡洲翔 韦雄



摘要:随着科学技术的不断发展、更新迭代和人民生活水平的提高。目前市面上普通的衣柜已经无法满足人们智能化生活的需求,衣柜朝着智能化、自动化的方向发展。本项目将研究一种符合现代人们理想生活的自动化叠衣储衣装置,该自动化叠衣储衣装置集叠衣装置、传送装置、衣柜、显示屏、控制模块于一体。综合串口通信、丝杆螺母传动等技术,实现了衣物的智能叠放和快捷存取。
关键词:自动化叠衣;丝杆螺母传动;储衣装置
引言
随着人们的生活水平和社会生产水平的不断提高,智能家居成为了人们的关注焦点之一。其智能化、自动化的实现过程可以最大程度地减轻人们的生活负担,因此相关产品一直受到人们的青睐。然而,目前市面上的叠衣机少之又少,大部分机器的功能仅局限于折叠衣物,而且在机器运作的开始还要将衣物人为地放平送入机构中,最终再手动将叠好的衣物取出,自己放入衣柜。当衣物的数量增加,整个叠衣到存放衣物的过程将会耗费更多时间,使得衣物的存取效率大大降低。因此,针对以上种种情况和目前市场的需求,设计一款集夹取、叠衣、传送、摆放功能于一体的自动化叠衣储衣装置是十分必要且实用的。
1 储衣装置整体的机械结构设计
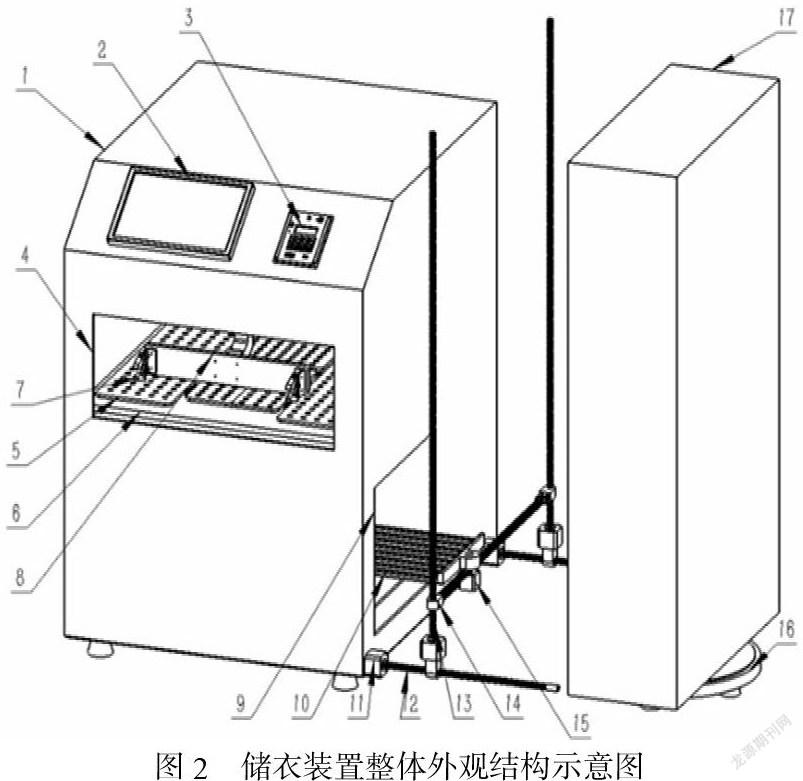
该自动化叠衣储衣装置整体的机械结构由方形机壳、显示屏模块、控制模块、叠衣装置、取衣装置、传送装置和衣柜组成。
自动化叠衣储衣装置的方形机壳含有正面方形取衣口和侧面方形出衣口,机壳内自上而下安装了取衣装置和折叠装置。
自动化叠衣储衣装置整体的机械结构原理设计图如图1所示:
自动化叠衣储衣装置整体的外观结构示意图如图2所示:
1.1叠衣装置的机械结构设计
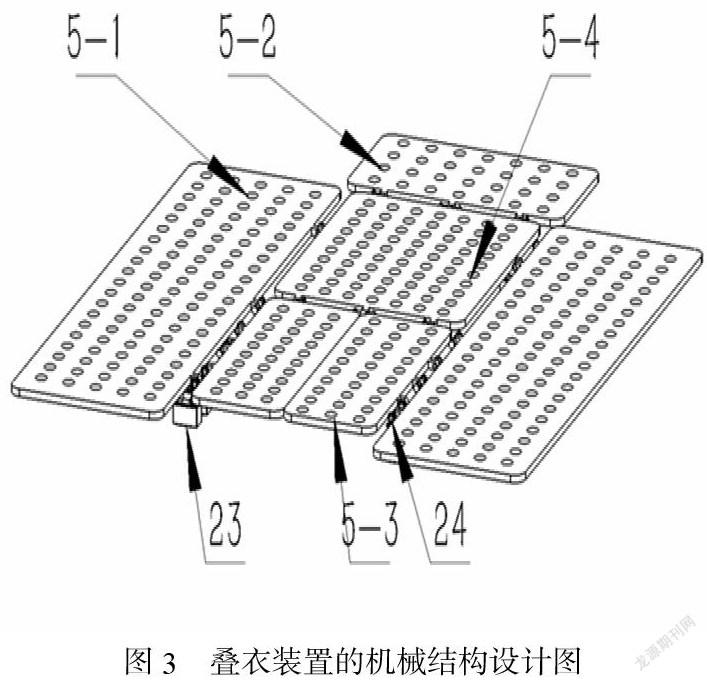
该自动化叠衣储衣装置的叠衣装置包括了与方形机壳的取衣口下缘相切的固定板、安装在固定板上的多孔折叠板和置于机壳底面的托衣板。
叠衣装置的多孔折叠板包括位于两侧的两块一次折叠板;位于两块一次折叠板之间前后依次相互紧靠的二次折叠板、三次折叠板和叠衣板,其中二次折叠板伸出一次折叠板的后缘;一次折叠板、二次折叠板和三次折叠板分别通过安装在固定板上的传动齿轮和角度舵机控制可依次向上翻转,将衣服折叠于叠衣板上;叠衣板由两块板对接构成,对接的两块板分别通过安装在固定板上的传动齿轮和角度舵机可向下翻转,将叠衣板上叠好的衣物通过固定板上的开口落下。
叠衣装置的托衣板与固定板上的开口相对应,由相互均匀间隔分布的一组条形杆组成,承接由叠衣板落下的衣物。
储衣装置的叠衣装置的机械结构设计图如图3所示
1.2取衣装置的机械结构设计
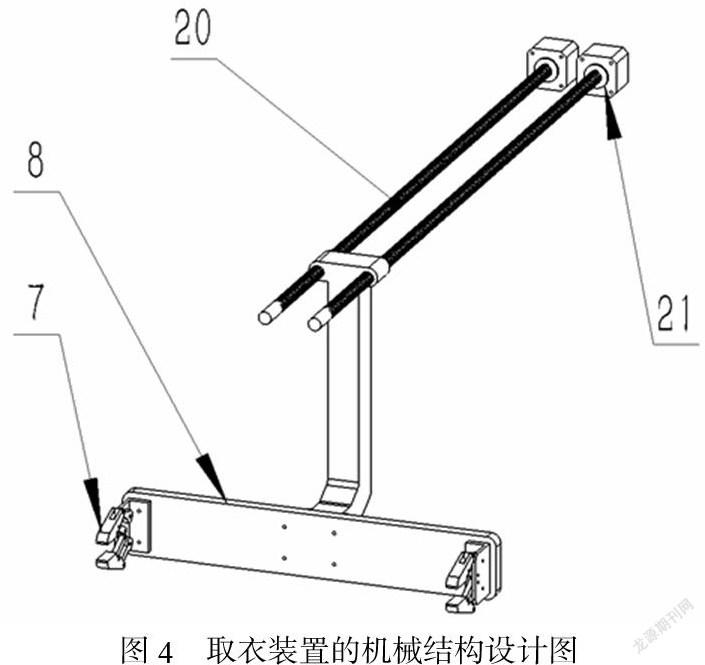
该自动化叠衣储衣装置的取衣装置包括倒T形取衣架、安装在取衣架两端部的衣夹、驱动取衣架前后往复移动的步进电机和丝杆螺母传动机构。
储衣装置的取衣装置的机械结构设计图如图 4所示
1.3传送装置的机械结构设计
该自动化叠衣储衣装置的传送装置包括可从所述方形机壳的出衣口进出、可伸入托衣板条形杆间隙中的传送叉;传送叉由步进电机控制可在其平面内进行360度转动,由步进电机驱动的X向丝杆螺母传动机构、Y向丝杆螺母传动机构和Z向丝杆螺母传动机构控制可进行X向、Y向、Z向运动,其中驱动X向丝杆螺母传动机构的步进电机固定安装在机壳出衣口一侧的外壁下端。
储衣装置的传送装置的机械结构设计图如图5所示
1.4衣柜的机械结构设计
该自动化叠衣储衣装置的衣柜包括外壳;外壳内有多个储衣格子,储衣格子的底面有可供所述传送叉进出的条形凹槽。衣柜外壳的底部有法兰转盘和驱动法兰转盘转动的步进电机。
储衣装置的衣柜的机械结构设计图如图6所示
1.5显示屏模块
该自动化叠衣储衣装置的显示屏模块安装在储衣装置方形机壳的上部,内置MCU对显示屏进行控制,控制模块只需要和串口屏模块进行串口通信就可以发送数据和信息。显示屏模块用于显示衣物存放情况,也可供用户对自动化叠衣装置进行操作,增加了该自动化叠衣储衣装置的便利性,提高用户的使用体验。
1.6控制模块
该自动化叠衣装置的控制模块安装在储衣装置方形机壳的上部,以STM32芯片作为控制模块的主控芯片,对取衣装置的步进电机、叠衣装置的角度舵机、传送装置的步进电机、衣柜的步进电机和串口屏模块进行控制。降低了自动化叠衣储衣装置的成本,增加了自动化叠衣储衣装置的实用性。
2 储衣装置整体的电控方案设计
2.1丝杆螺母传动机构的设计
该自动叠衣装置的取衣装置、传送装置都用到了丝杆螺母传动机构,通过结合丝杆螺母传动能自锁、连续工作、精度高的特点,實现旋转运动与直线运动之间的相互转换。方案中采用了42步进电机对丝杆螺母机构进行控制,以分别实现取衣机构和传送机构的功能。同时自动化叠衣储衣装置的传送机构设置有X向、Y向、Z向丝杆螺母传动机构,能够通过控制模块同时进行控制,在三维空间内进行移动,将衣物快速地传送到衣柜里,大大地提高了自动化叠衣储衣装置的工作效率。
2.2步进电机的驱动
该自动化叠衣储衣装置都安装了42步进电机对装置进行控制。本项目的方案选择使用42步进电机,是因为其体积小,重量轻,驱动方便,在开环控制中的精度较高。故而使用42步进电机进行开发能够有效减小工程量,节约开发成本,便于维护使用。对42步进电机我们使用了A4988进行驱动,A4988是一个微步电动机驱动器,内置转换器,只要控制器模块的单片机对转换器的输入端输入一个脉冲,即可驱动电动机产生微步,不需要进行复杂的相位顺序、高频率控制的复杂编程。
2.3角度舵机的驱动
该自动化叠衣装置的叠衣装置依靠角度舵机进行驱动。鉴于角度舵机扭矩大、体积小、容易安装的特点,叠衣装置采用了角度舵机对多孔折叠板进行控制,完成各种复杂的折叠动作。控制模块的单片机的定时器通道只需给角度舵机的信号端输入一个50赫兹的方波即可驱动角度舵机。控制角度舵机的转动则通过更改定时器通道输出的方波的占空比实现。
2.4串口屏与控制模块的串口通信
自动化叠衣储衣装置的显示屏模块是一块内置MCU的串口屏,控制模块通过与串口屏模块进行串口通信就可以实现对串口屏的控制和消息发送。控制模块与显示屏模块的串口通信协议是无校验位,八字节的协议,波特率为9600bps。单片机为串口设置一个发送数据缓冲区,当上一个字节被发送完成时下一个字节进入发送缓冲区。因此,为了避免出现漏传和丢包的现象,MCU必须不断循环查询串口发送状态,当一个字节的数据正在发送过程中时等待,直到当前字节数据发送完毕再发送下一个字节。如此循环,直到整条通信指令发送完成[1]。
3 结语
该自动化储衣装置针对了市面上的衣柜都只有存放衣物的功能,难以满足对用户的高级需求的缺点设置了取衣装置、叠衣装置、传送装置。整个叠衣储衣的流程由储衣装置自动完成。自动化叠衣储衣装置不仅可以在工厂使用,更适合家庭用户使用,其响应智能化时代的发展需求,具备以下产品特点:解放双手,机器全程自动化操作,免去以往手动叠衣的辛苦;获得自由,客户通过自动叠衣机节省下大量的时间和精力,可用于其他生活事项[2]。
参考文献
[1]唐修雄,刘伟.一种基于DMA技术的高效串口数据处理方法[J].信息通信,2020(10):86-88.
[2]安乐,张庆博,周扬扬,丁丙华.基于单片机的智能叠衣板的设计[J].黄河科技学院学报,2019,21(05):65-67.
作者简介:姓名:蔡礼泽,男 2001.02.23 汉族籍贯:广东陆丰高中,研究方向:机械类,单位:桂林电子科技大学。
基金项目:本文是桂林电子科技大学2021年自治区级大学生创业训练项目“家用自动叠衣智能衣柜”的项目成果,项目编号:202110595109
