基于PLC的光伏板清洁器设计
2021-01-10张连壮刘福裕田皓宇韩冰王雪伟颜安
张连壮 刘福裕 田皓宇 韩冰 王雪伟 颜安

摘要:随着能源危机加剧,太阳能发电为主可再生能源得到迅速发展。在沙漠地区水源缺乏,现有的人工清扫和机械化清扫,都不宜发展。
关键词:PLC;自动避障
1.研究背景
巨大光伏需求的背后,是庞大的光伏板和太阳能板清洁市场。因为灰尘在不同环境中有时呈酸性,有时呈碱性,对光伏板和太阳能板的腐蚀使得太阳辐射透过率减小,面板上的光照强度减弱,发电量减少。积尘受风速风向、降水强度、空气污染、灰尘性质、面板放置的地点、面板倾角等因素的影响,风速与灰尘沉积成正比;降水强度越大对灰尘沉积的冲刷效果也越大;雾霾天气造成灰尘沉积增加;不同性质的灰尘会对光伏板和太阳能板的清洗难度有很大影响;光伏板和太陽能板倾角越大,灰尘越难在其表面滞留和附着。这就对光伏板和太阳能板清洁设备提出了更高的要求。
2.国内外发展现状
为了拥有先进的技术装备,满足国内市场的需求,国内不少城市从20世纪60年代就着手组织科技力量研制清扫车。我国研制生产清扫车已有50多年的历史。但相对于国外发达国家,我国清扫车从技术水平、操作性能、清扫效果等方面都存在一定的差距。
目前的光伏板清洁器主要有两种:一种是光伏板板清洁车,体型庞大,且需要利用大量的水资源,在水资源缺乏的荒漠地区难以使用;另一种是安装在光伏板上的清洁器,安装复杂,成本较高,难以推广。
3.光伏板清洁器的系统总体设计
3.1光伏板清洁器控制系统的结构
光伏板清洁器控制系统的原理相当简单,它是利用西门子S7-200为控制核心,来达到整体控制系统。利用接触器控制四个直流电动机,利用光电传感器实现车体的避障,采用两个圆型毛刷和四个风机实现对光伏板的清洁,为主要清洁部分。采用24V锂电池来给装置持续供电。利用人机界面监控车辆的运行情况。
智能清洁车控制系统的组成部分有控制核心;车轮;控制保护部分;能源装置;清洁装置。
3.2光伏板清洁器整体设计方案
本设计是采用西门子S7-200系列为核心的处理器,选择CPU224模块,利用STEP7对PLC进行软件编程实现光伏板清洁器的整体控制、清洁部分和避障处理。
在系统设计中,通过组态画面与PLC的控制,进行对光伏板清洁器进行启动控制。
整体设计主要由硬件设计和软件设计组成。硬件设计要综合考虑光伏板清洁器的工作环境,所选用的硬件要具有在恶劣环境工作的条件。也必须符合本设计所需达到的一些性能需求。软件的设计要考虑到所选取硬件的型号,通过软件的设计,对硬件进行控制,使清洁器能够避障、自动启停、人机的监控。
本设计利用西门子S7-200PLC为控制核心部分。驱动部分利用直流电动机。避障采用观感传感器,各个机构的限位利用电感式传感器。采用直流锂电池为电能电源。中间控制部分利用继电器控制。
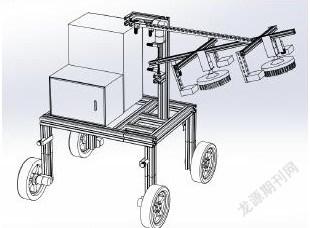
清扫结构为机器人的工作装置。为保证工作时的稳定,本装置运用了三角形原理。滑块结构,所述滑块结构运用的是滚珠丝杠滑块,安装在车本体上,由电机驱动,实现滑块的运动。滑块结构为两个,下面所述滑块结构13、滑块结构11(滑块结构13在滑块结构11上方,为横向,滑块结构11在滑块结构13下方,为纵向。滑块结构13、滑块结构11在同一水平面上)。滑块结构13、滑块结构11中又有滑块15、滑块16。
清扫结构2利用三角形原理提高稳定性。利用直角件、螺栓、螺母使两个滑块结构固定在支撑杆9上,通过电机使滑块结构11、滑块结构12运行,合金杆19一端固定在滑块16上,另一端与拉杆12一段连接,拉杆12的另一端连接在滑块15上,利用螺栓、螺母固与连接。通过改变滑块15、滑块16的位置进行对清扫角度的调整。
限位17,所述限位为对滑块移动范围的限制,运用金属感应传感器实现,防止滑块结构超出使用范围,造成损坏。
限位18,所述限位限制刷子接触光伏板距离的范围限制。
限位17与限位18相结合,达到自动找寻光伏板进行清洁的目的。
风机与刷子,实现“吹-扫-吸”三位一体式工作,在不适用水资源的同时保证了清洁程度,实现在荒漠地区的使用。
3.3 PLC的选择
PLC现已越来越被广泛应用到了现代化工业的设备和自动化控制中,它具有能耗低、体积小、性价比高、功能强大、编程简单、抵抗干扰能力强、和设备的可靠性较高等特点,使之成为我们现代化工厂设备和自动化控制的一个良好选择。西门子S7-200系列PLC的可编程计价控制器在计算机和电脑上的应用中更是获得了速度快、精确、稳定的效果,S7-200系列PLC可以很方便地与其他车辆之间进行通讯,这样就弥补了PLC人机交互界面差的缺陷。有考虑的本设计采用的数字量和模拟量均设计,选用EM222(16I\16Q)的数字量扩展模块,满足设计需求。
总结
我们设计的一款基于PLC的光伏板清洁器,实现了在荒漠水资源短缺、环境恶劣情况下对光伏板的有效清洁。
经费来源2021年实验室开放项目
