无线供电带式输送机巡检机器人研究
2021-01-10杨东泽赵昱皓孙强温裕鸿徐佳依
杨东泽 赵昱皓 孙强 温裕鸿 徐佳依

1.摘要
带式输送机作为旋转运输机械,广泛适用于采矿、海关以及物料工厂,由于连续运转时间长、负载大等极易发生内部损坏故障。对于煤矿行业,采用的带式输送机通常可以达到2-3km,其故障的排除依赖于人工巡检,该方法存在实际巡检难度大、故障排除不及时等弊端。为此,设计开发巡检机器人对于带式输送机的平稳运转以及企业的安全生产有着长远的意义和生产实践效益。
2.引言
针对当前矿用带式输送机运行过程中存在的安全隐患,研究一种新型的矿用带式输送机巡检机器人。带式输送机巡检机器人以一定的运动速度实现带式输送机机头至机尾的常态化故障监测,巡检机器人通过自身装备的音频信号采集装置、图像采集模块、气体检测器件、温湿度采集传感器等检测模块完成帶式输送机托辊的故障诊断、监测带式输送机工作状态以及周围环境的有害气体参数、温湿度指数等,实现带式输送机无人化、智能化巡检总目标。
3. 方案总体设计
分析巡检机器人的国内外发展现状,针对现有煤矿井下故障诊断存在的问题,引出自动化、智能化、无人化发展趋势的对比分析,在此基础上,提出研制一种主要基于音频信号的高传输速率和高采样率的带式输送机巡检机器人,结合无线供电技术完成无线供电带式输送机巡检机器人总体方案设计。
通过煤矿实地调研,结合设备工况,利用SolidWorks建立机器人本体结构模型,根据采集工况类型、要求等的不同,研制以树莓派(Raspberry)控制器为核心的数据采集单元和以WIFI无线通信技术为核心的无线数传模式,绘制硬件电路及进行软件编程,实现噪声检测系统的信息采集和高速传输。
带式输送机主要依靠带面与托辊的摩擦进行物料运输,运转过程中托辊众多,判别方式往往依据耳听目看,故障排除难度大。针对该问题,采用一种基于机器学习的智能化音频监测方案,研究托辊在不同健康状态下的信号频谱结构信息,将现代信号处理技术、特征提取技术与BP人工智能技术相结合,以此优化故障诊断机制。
设计带式输送机巡检机器人监测平台的信号系统传输方案,通过Raspberry硬件平台的搭建确保信号的下位机传输,构建图形化编程G语言软件上位机LabVIEW和MATLAB信息处理结合的人机交互界面;建立特征信息数据库,创建信号采集曲线、特征提取判别等界面,实现信息交互。采用TCP/IP协议,开发完整的信息传输系统,对下位机和上位机软件进行相关调试及优化。
4. 巡检机器人装置平台搭建
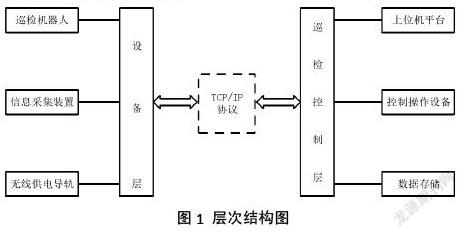
根据带式输送机在煤矿的实际需求和特性,带式输送机巡检机器人需要实现3个层次的设计要求,才能达到所预设的研究结果,其各层功能实施如图所示。设备层作为首要层次,主要实现机器人外观结构对工作环境的适应,达到便捷、可靠和安全的巡检要求。第二层网络传输层,采用TCP/IP协议进行通讯,实现信息的远距离传输。第三层巡检控制层,主要实现信息的处理、故障的预警及排除。
巡检机器人的具体工作过程为:信息采集装置在行走机构的带动下沿无线供电导轨进行巡检作业,当步进电机正转时,驱动轮朝预设方向运转,带动巡检装置朝预设方向运动;当步进反转时,带动巡检装置朝预设方向的反方向运动。控制仓外侧还设置有位置传感器,位置传感器与控制器电连接,且控制器被配置为当位置传感器的避障组件发出避障信号时控制巡检装置停止巡检,实现带式输送机方向的巡检。气体传感器、温湿度传感器用于进行工作环境状态的实时检测与传输。控制仓底部的直线电机根据实际需要实现伸缩装置高度方向上下移动,当直线电机作业会促使连接块水平移动,同时带动伸缩板实现连杆运动,实现多自由度、多视角的信息采集,完成带式输送机带面监控、托辊监控、地基沉降等故障,真正实现带式输送机的多功能诊断。
多信息诊断传感器以及音视频采集装置由主控制器协同作业,且根据噪声传感器以及视频采集装置的采集信号诊断带式输送机的所处状态,及时准确的获取当前带式输送机工作状态。如图所示,经由控制器进行信号的量化、发送,近端无线感应装置在接受信息的同时,通过无线通讯方式与上位机建立联系,在多重故障数据库中比对信息,判别故障信息。
4.结论
通过对某煤矿实地调研,发现煤炭开采过程中存在自动化程度低、智能化水平落后以及工作效率慢等不足,依托重点研发项目支持,设计一款无线供电带式输送巡检机器人,实现煤矿井下带式输送机的日常巡检作业,采集井下巷道工作参数,远端智能化控制。为此,以矿用带式输送机巡检过程中自动化水平最为低下的托辊故障入手,利用现代信号处理技术、无损检测技术以及人工智能诊断的科技理论,开展了无线供电带式输送机巡检机器人的研究。
6.参考文献
[1] 张树生, 马静雅, 陆文涛,等. 矿用带式输送机巡检机器人控制系统设计与实现[J]. 煤矿机械, 2015, 036(007):28-30.
[2] 陆文涛, 裴文良, 张树生,等. 矿用带式输送机巡检机器人研究与设计[J]. 煤矿机械, 2015, 000(009):18-20.
[3] 马静雅, 岑强, 李军伟. 矿用带式输送机巡检机器人系统设计[J]. 煤炭技术, 2016, v.35;No.265(01):249-251.
[4] 邵珠娟, 邓晓刚, 程豪杰,等. 智能带式输送机巡检机器人在煤矿的应用[J]. 中国煤炭, 2020, v.46;No.527(06):40-44.
[5] 王川伟, 马宏伟, 马琨,等. 带式输送机巡检机器人行驶力学及其仿真研究[J]. 煤炭技术, 2018, 37(10):264-267.
2020年衢州学院大学生创新创业训练计划项目(Q20X047)
