考虑变化湍流风速条件的风电机组改进自适应转矩控制
2021-01-09周连俊殷明慧杨炯明张刘冬
周连俊,殷明慧,杨炯明,邹 云,张刘冬
(1. 江苏金风科技有限公司,江苏省盐城市224100;2. 南京理工大学自动化学院,江苏省南京市210094;3. 国网江苏省电力有限公司,江苏省南京市211106)
0 引言
为最大限度捕获风能,风电机组在额定风速以下一般处于最大功率点跟踪(maximum power point tracking,MPPT)运行模式[1-4]。MPPT 控制常用的实现方法主要包括叶尖速比法[5-6]、最优转矩(optimal torque,OT)法[6-10]以及爬山法[11]。其中,OT 法电磁转矩调节平稳,不依赖精确风速信息,被兆瓦级商用风电机组广泛采用,本文也以此类MPPT 方法为研究对象。
对于应用基于系统稳态设计[12]的传统OT 法的大转动惯量风电机组,由于无法足够快速响应风速波动,绝大部分时间都处于MPPT 过程中[12-14]。因此,文献[15]提出了通过调整转矩曲线斜率增大不平衡转矩,以帮助风电机组更快加速和减速的改进思路。在此基础上,文献[8]提出了减小转矩增益(decreased torque gain,DTG)控制。但是,DTG 控制采用的是恒定转矩增益系数,不能适应变化的湍流风速条件,因此,文献[16-17]提出了应用自适应算法迭代搜索最佳转矩增益系数的自适应转矩控制(adaptive torque control,ATC)。该方法对于最佳增益系数的搜索与爬山法原理类似,不需预先辨识风电机组参数,易于批量快速实施,且通用性强。
已有文献指出,变化的湍流风速条件(平均风速、湍流标准差和湍流频率)[18]会导致自适应算法搜索方向出错甚至不收敛[19-21]。其原因在于转矩增益系数的扰动和湍流风速条件变化都会改变风能捕获效率,而自适应算法并没有考虑后者的影响。针对这一问题,文献[21-22]提出了限定寻优区间的ATC,以保证转矩增益始终处于合理范围之内。但是,该控制方法需要通过极为耗时的风电机组仿真计算,离线获取风速条件与最佳增益系数的统计关系来确定该寻优区间。显然,这一做法违背了ATC法不依赖风电机组模型的初衷,实质上转变为需要事先基于风电机组模型数值仿真离线构建风速条件与转矩曲线最佳调整量映射关系的一类离线优化-在线匹配的OT 法[20,23-24]。此外,文献[21-22]未考虑湍流频率特征,影响到寻优区间取值的合理性。
为了保持原有ATC 法通用性强、不依赖模型的特点,本文根据湍流风速条件变化对自适应算法的影响机理分析,发现渐变良好的风速条件(即平均风速持续递增,湍流标准差或湍流频率持续递减)容易导致自适应搜索方向连续出错,转矩增益系数严重偏离最优值。这导致在面对逐渐有利于MPPT 的湍流风速条件时,ATC 法的效率反而降低了,甚至可能不如传统OT 法。
基于上述分析,本文引入动态风能损失量指标[18]刻画湍流风速条件对风能捕获的影响程度,并提出考虑湍流风速条件变化的改进ATC。该方法能够在搜索最佳转矩增益系数的过程中,利用动态风能损失量指标辨识出风速条件渐变良好场景,及时中断搜索,避免因连续搜索方向错误导致风能捕获效率的大幅降低。最后,本文基于风电机组传动链模拟实验平台[25-27],以美国国家可再生能源实验室(National Renewable Energy Laboratory,NREL)600 kW CART3 试验风电机组[28]为对象,通过实验验证了本文方法的有效性。
1 OT 与ATC
风电机组MPPT 重点关注的是机电动态过程,本章简述与该过程相关的风电机组气动模型、传动链模型以及实现风电机组MPPT 的OT 法和ATC法原理。
1.1 风电机组气动模型
基于Cp-λ 曲线的风电机组简化气动模型[9]为:

式中:Tm为风轮施加在风电机组轮毂中心的气动转矩;v 为风速;ρ 为空气密度;R 为风轮半径;ωr为风轮转速;Cp(λ,β)为风能利用系数,与叶尖速比λ 和桨距角β 相关。
若要考虑风电机组的气动-结构-控制耦合作用,更为精细地刻画风电机组的复杂气动特性,可采用基于叶素-动量理论的气动模型[29],常见的Bladed、FAST 等风电机组设计与性能分析软件的气动计算模块均基于该理论。
1.2 传动链模型
可将风电机组传动链等效为一个双质量块模型[30-31],并划分为风轮侧和发电机侧。
式中:Te为电磁转矩;Tls和Ths分别为风轮侧和发电机侧的扭矩;Dr和Dg分别为风轮和发电机的阻尼系数;Jr和Jg分别为风轮和发电机的转动惯量;ωg为发电机转速;ng为齿轮箱变比。
1.3 OT 法
实现风电机组MPPT 的OT 法的电磁转矩指令由式(3)获得[7]。
1.4 DTG 法
从OT 法的原理可知,其设计基于系统稳态,忽视了风电机组在不同稳态工作点之间变换的动态过程及其性能。然而,湍流风速时刻都在快速变化,而风电机组的大转动惯量意味着其跟踪湍流风的动态响应性能不佳,这导致MPPT 阶段的风电机组绝大部分时间均处于跟踪风速的过程中,而不是运行于稳态工作点。鉴于此,DTG 法的设计思路在于提升动态性能及加速跟踪过程,不再围绕稳态工作点展开。
DTG 控制[8]按式(4)调整电磁转矩:

式中:Kd为转矩增益系数,为小于Kopt的常数。在附录A 图A1 所示转矩-转速图上表现为转矩曲线斜率整体变缓,DTG 的转矩曲线整体位于最优转矩曲线下方。这意味着在MPPT 阶段,风电机组在DTG 法控制下的电磁转矩输出小于OT 法对应的电磁转矩输出,使得加速时DTG 法控制下的不平衡转矩大于OT 法对应的不平衡转矩,从而提升风电机组在跟踪渐强阵风时的加速性能。同时,也可注意到风电机组减速性能被弱化了。因此,需要通过合理优化Kd值,以牺牲一部分跟踪渐弱阵风的减速性能为代价,强化蕴含更多能量的渐强阵风的风能捕获,从而获得一段时间内风能捕获总量的整体提升。
1.5 ATC 法
DTG 控制采用恒定的转矩增益系数,未实现其随风速条件变化的周期性优化设定。为进一步提高风能捕获效率,在DTG 控制的基础上,ATC[16-17]引入了自适应迭代搜索算法。按照式(5)至式(8),该算法通过扰动相邻迭代周期的Kd,并计算周期运行结束后风能捕获效率的变化量,确定Kd下一个迭代周期的搜索方向及调整幅值。如此循环迭代,直至搜索到Kd的最优值。
式中:k 为迭代次数;γ 为转矩增益系数的调整系数。风能捕获效率Pfavg的定义为:
式中:N 为统计时段内总的采样次数;Pcap为风电机组实际捕获功率;Pwy为风功率。
2 湍流风速条件变化对ATC 的影响分析
本章基于对湍流风速条件利于风电机组风能捕获程度的单值指标刻画,分析了风速条件变化对ATC 法迭代搜索过程的影响,并指出当面临风速条件渐变良好场景时,自适应搜索方向可能连续出错,导致所获转矩增益系数的设定值在较长的时间内显著偏离其最优值,进而造成发电量的大幅损失。
2.1 有利于风电机组MPPT 的良好风速条件
针对持续时长在数十分钟至数小时范围内的湍流风速序列,风电领域常采用平均风速v、湍流标准差σ、湍流频率ωeff这3 个特征指标共同刻画其风速条件[18],本文记为TC=(,σ,ωeff)。
在采用相同风电机组MPPT 控制策略的情况下,湍流风速条件的不同会造成风能捕获效率的显著差异[10,24,32]。本文基于NREL CART3 试验风电机组的仿真,画出了对应于不同平均风速的Pfavg-Kd曲线,如图1 所示,对应于不同湍流标准差和湍流频率的Pfavg-Kd曲线与图1 类似,见附录A 图A2 和图A3。由图可知,保持另外2 个风速条件特征指标不变,Pfavg-Kd曲线会随平均风速增大、湍流标准差或湍流频率减小而整体上移。这表明,具备较高平均风速、较低湍流标准差和较低湍流频率特征的湍流风速更有利于风电机组的风能捕获。因此,本文称湍流风速条件由图示TC,A向TC,C的变化为风速条件渐变良好。
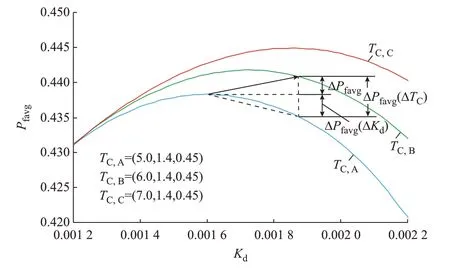
图1 Pfavg-Kd曲线随平均风速的变化Fig.1 Variation of Pfavg-Kd curve with mean wind speed
2.2 湍流风速条件变化对自适应算法的影响机理
文献[19-20]指出,对于实现风电机组MPPT的ATC 法,当相邻2 个自适应迭代搜索周期的湍流风速条件发生变化,由转矩增益系数调整量ΔKd和湍流风速条件变化ΔTC共同决定风能捕获效率的变化量ΔPfavg,如图1 所示。

综合式(5)至式(8)、式(10)可知,风速条件变化会对Kd的迭代搜索过程形成干扰,包括调整幅值和搜索方向两方面[21]:
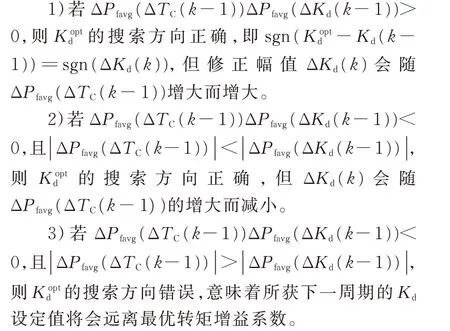
实质上,当湍流风速条件变化取代转矩增益系数调整成为改变风能捕获效率的主导因素时,将对自适应搜索算法产生不容忽视的影响。
2.3 自适应搜索方向持续错误的现象
本文进一步发现,当出现2.1 节所述湍流风速条件渐变良好场景时,存在ATC 迭代搜索方向持续出错,导致风电机组MPPT 性能恶化,严重损失发电量的现象。图2 所示为ATC 的搜索方向持续出错示意图,湍流风速条件在时段1 至3 从TC,A渐变至TC,C,黄色圆圈代表不同风速条件对应的理论最优Kd值,黑色方框代表ATC 方法搜索出的Kd值。相较于Kd调整带来的风能捕获效率变化量ΔPfavg(ΔKd),始终是风速条件变化对风能捕获效率造成的影响ΔPfavg(ΔTC)在发挥主导作用,导致自适应迭代搜索方向在连续多个周期中持续错误,并使得后续难以及时修正回转矩增益系数最优值附近。
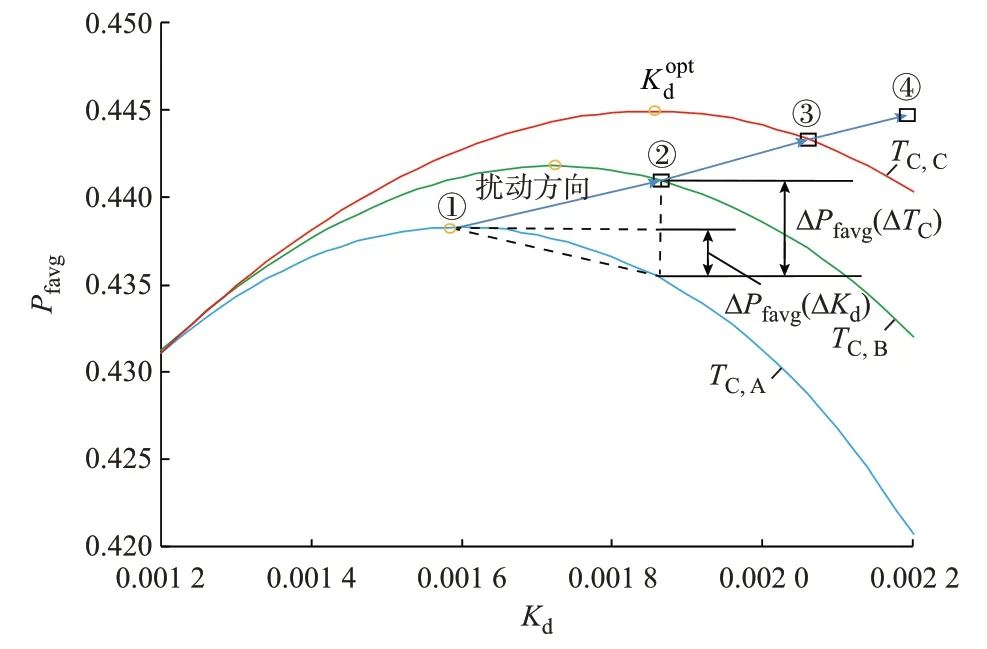
图2 ATC 的搜索方向持续出错示意图Fig.2 Schematic diagram of consecutively incorrect search directions of ATC
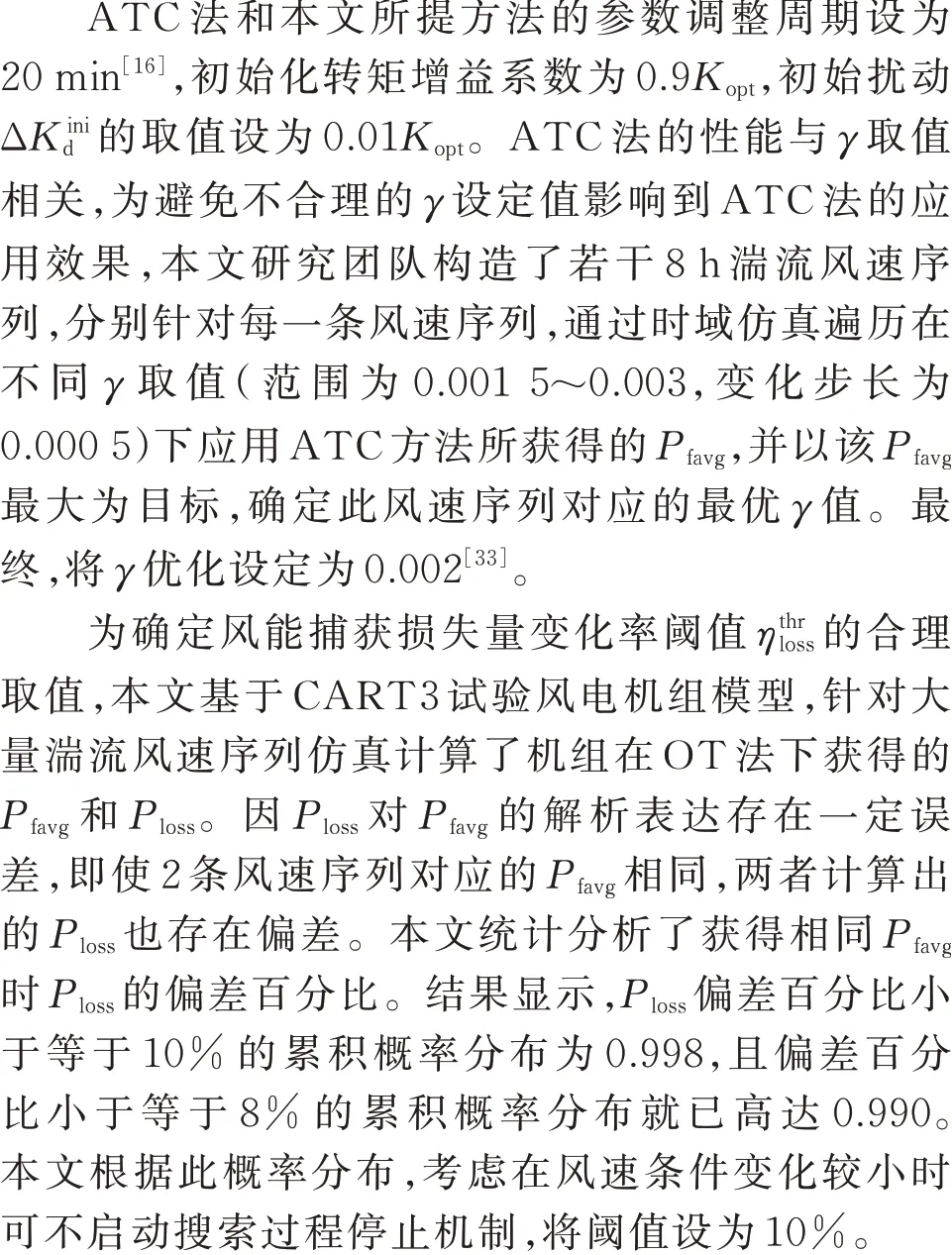
如图3 所示,上述现象会导致Kd在较长的时间内大幅偏离最优值,引发风能捕获效率的显著下降,严重时甚至在某些时段弱于传统OT 法。因此,在采用ATC 法实施风电机组MPPT 控制时,需要有效识别会引发不恰当转矩增益系数调整的风速条件渐变良好场景并加以应对,以避免风电机组MPPT性能的恶化以及发电量的大幅降低。
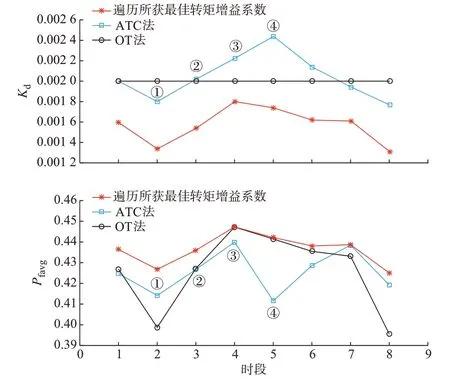
图3 不同MPPT 方法及遍历法对应的各时段Kd和PfavgFig.3 Corresponding Kd and Pfavg of different MPPT methods and traversing method during each period
3 考虑湍流风速条件变化的改进ATC 法
本章通过引入能够综合刻画湍流风速条件差异的动态风能捕获损失量指标,实现风速条件变化场景的辨识与变化程度的量化,并在ATC 法的基础之上,针对风速条件渐变良好场景,在自适应算法中增加搜索过程的中断和重启机制。
3.1 湍流风速条件差异的综合量度指标
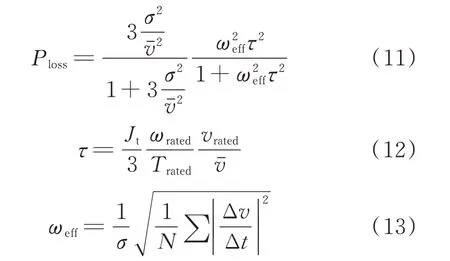
式中:τ 为风电机组时间常数;Jt为风电机组总的转动惯量,可近似等于Jr与Jg之和;vrated,ωrated,Trated分别为风电机组的额定风速、额定转速以及额定转矩;N 为统计时段内总的采样次数;Δt 为风速采样间隔。由式(11)至式(13)可知,Ploss恰好是3 个湍流风速特征指标的函数。
3.2 自适应搜索过程的中断与重启策略
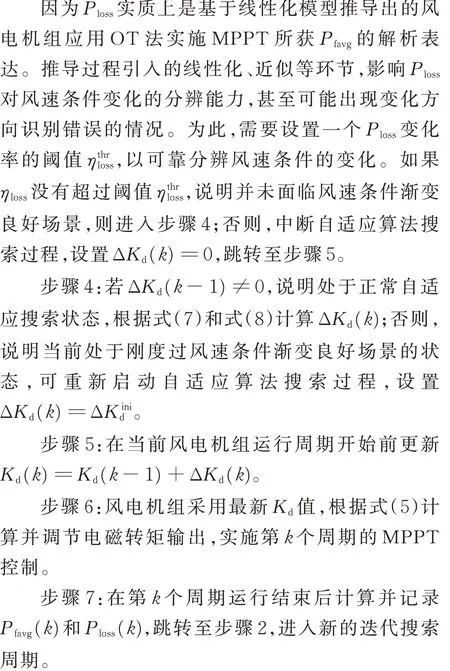
本文提出了考虑变化湍流风速条件的风电机组改进ATC。该方法利用动态风能捕获损失量指标进行风速条件渐变良好场景的辨识,并在自适应算法中增加搜索过程的中断以及重启策略,以应对该场景。如图4 所示,改进ATC 法的具体步骤如下。
步骤1:初始化。对于第1 个和第2 个运行周期,设置初始转矩增益系数Kd(1),取值范围一般为0.8Kopt~Kopt;设置Kd的初始扰动为ΔKinid,Kd(2)=Kd(1)+ΔKinid;进 行k=1 及k=2 这2 个 周 期 的 运行,并在每个周期运行结束时计算并记录Pfavg(1),Ploss(1)以及Pfavg(2),Ploss(2)。
步骤2:k=k+1,进入新的迭代搜索周期。
步骤3:识别风速条件是否正朝着有利于风能捕获的趋势发展。根据式(14)计算第k-1 与k-2步迭代周期之间的Ploss的变化率:
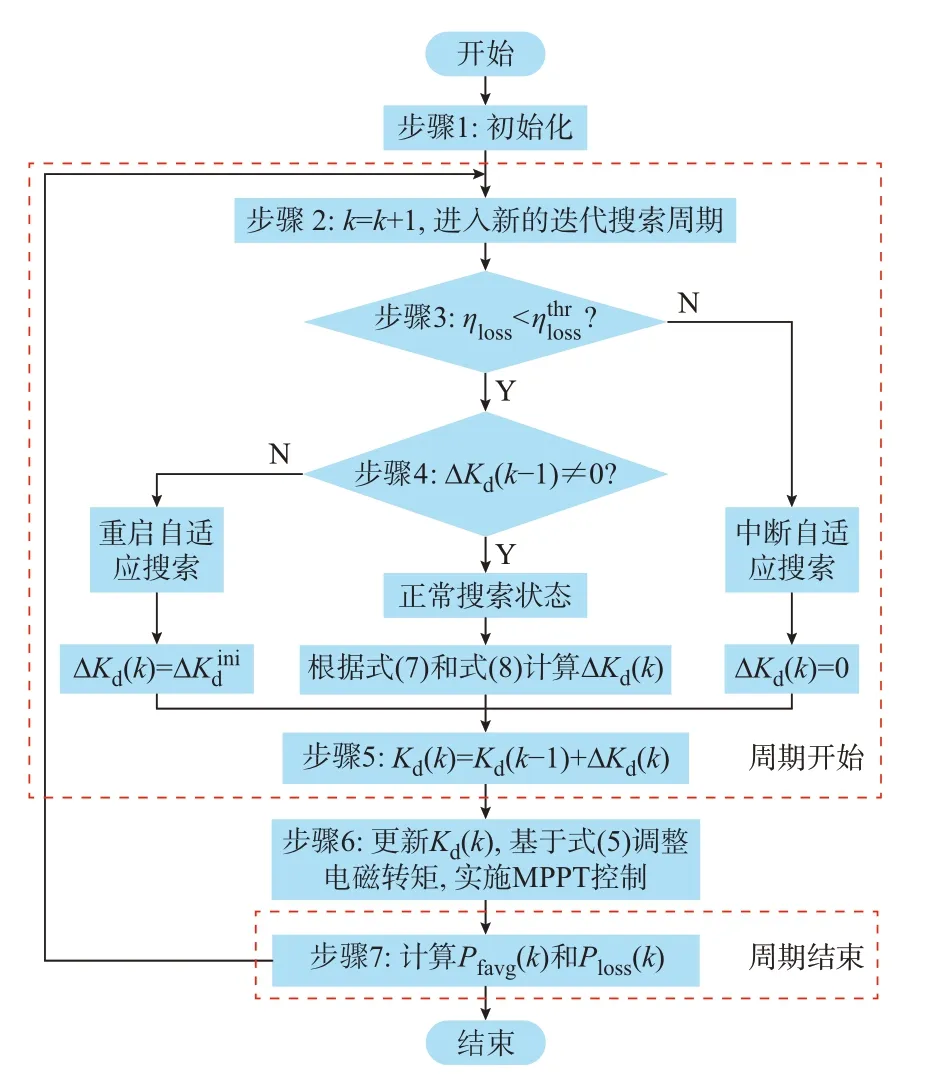
图4 改进ATC 法流程图Fig.4 Flow chart of improved ATC method

4 实验验证
本文利用风电机组传动链模拟实验平台[25-27],以NREL CART3 试验风电机组[28]为模拟对象,对所提改进方法的有效性进行了实验验证。
4.1 风电机组传动链模拟实验平台简介
15 kW 风电机组传动链模拟实验平台[25-27]如附录A 图A4 所示,是一个以基于Beckhoff PLC 的实时仿真系统和风轮模拟系统为主体构成的风电机组转矩自由度功率硬件在环模拟实验平台。前者完成风轮气动转矩的实时仿真计算,作为风轮模拟系统的控制指令。后者由传动变频器根据转矩参考指令对交流异步电机进行转矩控制,以模拟湍流工况下的风电机组轮毂中心转矩特性,而发电机、变流器及主控系统与实际风电机组保持一致。
通过引入等比例缩放概念、研究滤波算法进行转动惯量软件补偿、加装机械飞轮进行转动惯量硬件补偿等措施[25-27],该实验平台能够模拟出与MPPT 过程密切相关的兆瓦级大转动惯量风电机组的慢机械动态特性。
4.2 MPPT 方法参数设置
4.3 基于实测数据的湍流风速构建
本文通过Turbsim 软件[34]构建了2 条风功率谱符合Kaimal 谱[35-36]、总时长为8 h 的湍流风速序列。其中风速序列1 的湍流风速条件波动较大,而风速序列2 的湍流风速条件波动较为平缓。每条8 h 风速序列含24 个20 min 的风速时段,每个时段的平均风速参照中国江苏某低风速风电场的实测值,湍流强度等级设为A 级,湍流积分尺度取值设为100 m。
4.4 不同MPPT 方法的性能比较
图5 为通过实验获得的风速序列1 对应的Ploss,Kd和Pfavg时段变化曲线。风速序列2 对应的相关变量时段变化曲线见附录A 图A5。8 h 总体数据如表1 所示。
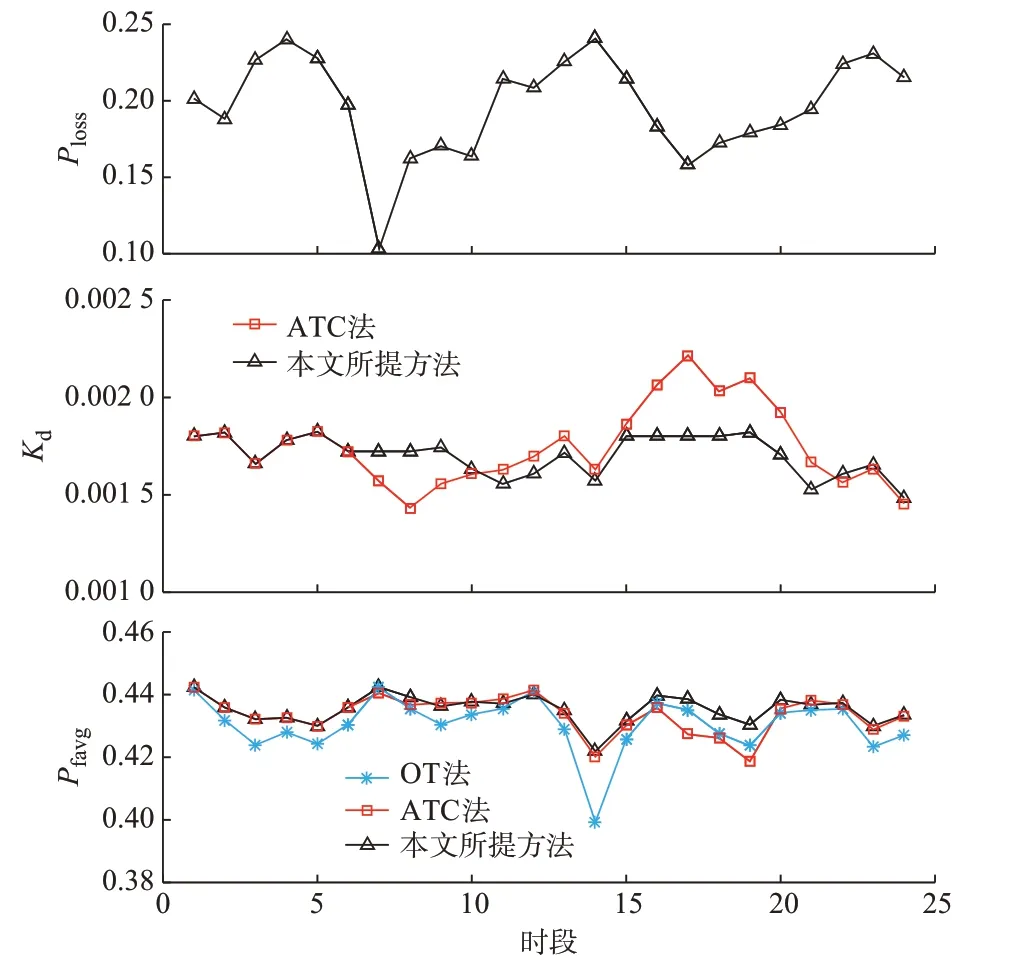
图5 不同MPPT 方法性能的比较(风速序列1)Fig.5 Performance comparison among different MPPT methods (wind speed profile 1)
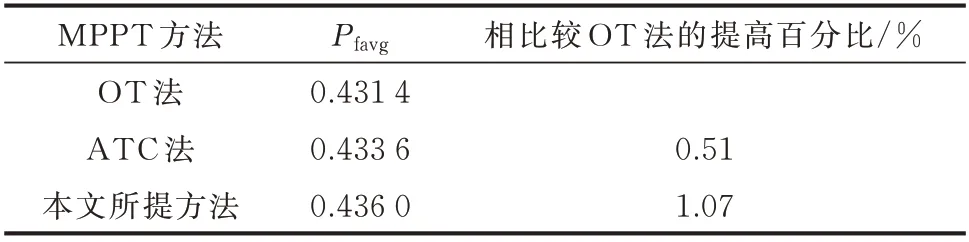
表1 不同MPPT 方法效率的比较Table 1 Efficiency comparison among different MPPT methods
由图5 和附录A 图A5 可知:
1)对于湍流风速条件波动较大的风速序列1,在时段5 至7 以及14 至17 期间出现了湍流风速条件渐变良好场景,导致Kd的搜索方向与调整值持续远离最优值。并且,因为Kd已经出现严重偏差,后续18 至20 时段也未能及时修正回最优Kd值附近。因此,ATC 法的性能在相当长的时段内表现不佳,甚至出现了应用效果连传统OT 法都不如的情况。
2)本文方法及时判断出了风速条件渐变良好场景,并中断了搜索过程,锁定了Kd值,有效遏制了转矩增益系数调整出现严重偏差以及风能捕获效率显著降低的问题(时段7 至8 和16 至18)。表1 列出了风电机组运行于不同MPPT 控制策略下的8 h 平均风能捕获效率。如表1 所示,应用ATC 法所获效率较传统OT 法只提升了0.51%,而本文所提改进方法提升了1.07%。对于当前风电行业,0.5%左右的效率提升已具备较好经济效益及工程应用价值。
3)对于湍流风速条件波动较小的风速序列,搜索过程的中断及重启机制未被触发,本文所提方法与ATC 法的实施效果完全相同。
5 结语
考虑到风能捕获效率能够综合量度3 个湍流风速特征对风能捕获的共同作用,这就为考虑湍流风速条件变化影响的风电机组MPPT 控制改进奠定了基础。具体到ATC 法,忽视风速条件变化的设计导致其自适应迭代搜索过程极易受到复杂多变湍流环境的干扰。本文分析发现了导致ATC 性能恶化引发风能捕获效率大幅降低的风速条件渐变良好场景,并为了避免在该场景下自适应搜索方向持续错误导致转矩增益系数长时间偏离最优值,而针对性地提出了考虑湍流风速条件变化的改进ATC。该方法引入了能够刻画风速条件利于风能捕获程度的单值指标以辨识风速条件渐变良好场景,并通过在自适应算法中增加搜索过程的中断和重启机制,及时遏止转矩增益系数调整出现严重偏差。实验结果表明,本文所提改进方法能够改善ATC 的性能,提升发电量。
应该说,本文仅提出了ATC 法在风速条件渐变良好场景下自适应搜索过程不收敛问题的可行解决方案,实验基于有限算例验证了其有效性,但改进算法能否在面对复杂多变的各种湍流风速条件时均保持收敛性,将是今后要研究的问题之一。与此同时,除了风速条件渐变良好场景,是否还存在显著影响ATC 法性能的其他特殊湍流场景,以及如何克服它们的影响仍有待深入研究。
本文在撰写过程中得到国家自然科学基金项目(51977111)资助,特此感谢!
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
