输入时滞的海上风电机群分布式控制
2021-01-08刘维扬曹智杰
唐 桢 ,王 冰,刘维扬,曹智杰
(1.河海大学能源与电气学院,江苏南京 211100;2.南京豪庆信息科技有限公司,江苏南京 210006)
1 引言
在全球高度关注低碳经济的大背景下,风电作为主要的可再生能源,以其巨大的潜质成为全球开发的热点[1-2].海上风能资源非常丰富,而且风湍流强度和海面粗糙度相对陆地更小,海上风能资源的开发利用是满足能源增长、实施可持续发展的重要措施[3-4].随着海上风电技术的成熟,海上风电机组呈现大型化的发展趋势,同时海上风电场的规模也不断扩大.为满足风电机群在海洋环境下的稳定性要求,需要设计良好的控制策略,使得单台机组以及整个风电场的控制效果得到进一步的提升.
随着电力系统和通讯网络的快速融合,系统的控制形式也趋向于网络化、智能化和综合化.相对于传统的集中控制,分布式控制结构具有灵活性高和可扩展性好等特点,在发电、输电、配电等电力产业模式均被广泛采用[5-7].海上风电场中含有多台风电机组,且海上环境复杂多变,机组和主控中心的通信较为复杂.对海上风电机群采用分布式控制结构,可以将海上风电场看作一个分布式网络,风电场中的每台机组就是网络中的一个节点,每个机组可以从邻近的机组获得相应的状态信息或参数,并将其决策于控制策略中,不存在集中控制器与每个风电机组通信做出控制决策[8].分布式控制极大地减少了风电机组与集中控制器的通信负担,同时也减少输配电设备的投资和电网输送的损失.
现代电力系统逐渐趋向于多互联、大规模等特性发展,广域测量系统(wide area measurement system,WAMS)被应用到电力系统中,为现代电力系统的分布式同步测量和稳定控制提供了可能.WAMS存在于风电厂的相量测量单元、通信系统、调度控制系统.在WAMS系统中,信号传输产生的时滞通常较大,且呈现出不可忽视的随机特性,系统时滞问题在许多电力工程和应用中不可避免[9-10].风电机组的控制输入作为广域测量信号在信号测量和传输中受到时滞的影响,可能导致风电机组系统在不稳定状态下的主特征值和主振荡频率产生变化.根据时滞系统理论,时滞往往是系统不稳定或性能恶化的根源.在风力发电机组系统中,输入时滞会导致电力系统控制器的预设参数失效,甚至会降低系统运行点的稳定裕度,从而恶化电力系统的运行状况,因此风电机组的输入时滞控制问题不容忽视[11-12].
近年来,风电机组受时滞影响的相关研究却相对较少,文献[13]考虑了风电机组的时滞问题,利用网络预测控制(network predictive control,NPC)的协调设计方法增加风电系统的阻尼,补偿广域信号产生的时滞.文献[14]考虑了从控制单元到马达驱动器的命令通信时滞,提出了惯性补充方案.文献[15]针对多区域时滞电力系统,提出了一种新的分散滑模变结构控制策略,有效减小时滞引起的频率偏差和联络线功率波动.对于时滞风电系统的研究多数是对非线性普适模型的研究,并没有考虑时滞对风机模型的作用位置,同时也没有考虑多个风机之间构成的协调问题.
目前,有关非线性时滞系统的稳定性问题在实际工程和理论研究中受到学者和工程师的广泛关注.设计状态反馈控制器的方法相对还原法更容易实现,所以其成为主要的控制方法应用在输入时滞系统的稳定性分析中.文献[16]结合传统的Lyapunov-Krasovski函数,设计了一种新的自适应控制器,得到非线性时滞系统的稳定性判据,但其推导过程中多次对矩阵不等式放大,增加了结论的保守性.文献[17]基于线性矩阵不等式(linear matrix inequality,LMI)方法设计了一种模糊控制器用来处理非线性系统的时滞.LMI方法在实际复杂系统中寻找多个不确定矩阵不一定可用,且其过程较为复杂.海上风电机群是一个多输入多输出的复杂非线性时滞系统,而Casimir函数是非线性系统设计的一个重要工具,可以进一步深化Hamilton系统的稳定性分析与控制[18-19].本文利用Hamilton理论中的Casimir函数方法,能够有效地解决非线性输入时滞系统的控制器设计问题,同时减少了多个不确定矩阵的使用,克服了以往通过多次矩阵放大带来的保守性.该方法更容易实现,而且还能够结合分布式控制,解决了多个控制对象之间的协调问题.
为实现双馈风力发电机群的时滞控制,本文首先对双馈风力发电机组进行Hamilton实现,得到风力发电机组的端口受控耗散Hamilton(port-controlled Hamilton with dissipation,PCH-D)系统模型,该模型具有良好的结构特性和清晰的物理意义;然后,针对风电单机系统包含输入时滞的情况,利用Casimir 方法将PCH-D系统的闭环形式嵌入到扩展系统中,再将扩展后的系统限制在不变的Casimir流形上,在保持PCH-D系统结构下进行控制,使得闭环系统通过不同的能量整形具有所需的稳定性能;接着,将单机控制扩展到具有多台机组的风电机群系统,引入图论的基本概念和描述方法,得到风电机群的PCH-D时滞模型,将Casimir方法与分布式控制相结合,设计输入时滞下的分布式协同控制策略,使得整个风电机群在存在输入时滞的情况下,能够达到全局稳定且有功功率输出同步的控制效果,提高了风电场的稳定性.最后,通过仿真验证了风电机群基于输入时滞的分布式时滞控制策略的有效性.
2 双馈风电机组Hamilton模型和图论基础
2.1 双馈风电机组的Hamilton实现
风力发电机组包括风力机、传动结构和双馈感应发电机(doubly fed induction generator,DFIG),如果将涡轮、齿轮箱、轴和发电机集中到一个等效质量Htot中,则单质量传动系统可以用一个与功率相关的一阶模型表示[20]:

其中:Htot为风机和发电机等整体的惯性常数;s为转子转差率;Pm为风机输入的机械功率;Ps=为风电机组输出的有功功率.
为方便对风电机组控制和分析,将abc三相磁链方程做dq坐标变换,变换后的电感系数都变为常数.同时考虑到定子瞬时磁通的积累可能给双馈发电机带来有害的功率和转矩振荡,因此采用忽略定子电磁暂态的二阶DFIG模型[21]:

其中:Lss为定子自感;Lrr为转子自感;Lm为互感;Rr为转子电阻;ωs为同步角速度;Xs为定子电抗;为定子瞬态电抗;iqs和ids分别为q轴和d轴的定子电流;分别为在瞬态电抗下的q轴和d轴电压;uqr和udr分别为q轴和d轴的转子电压;

因此,双馈风力发电机组在式(1)-(2)下写成一个三阶模型

因此,式(3)是风电机组在d-q坐标系下的双输入三阶模型,x=为状态,u=[udruqr]T为输入.
双馈风电机组是一个多输入多输出的非线性模型(3),而PCH-D模型是处理非线性模型的一个重要方法,其更适用于高阶大型电力系统的暂态稳定研究.因此本文将双馈风电机组的PCH-D模型作为研究的基础模型,式(4)则是典型的PCH-D形式[19]

其中:J(x)=-JT(x)∈Rm×m,R(x)∈Rm×m,R(x)=RT(x)≥0,G(x)∈Rm×n.为了将三阶风电机组数学模型(3)转换成PCH-D形式(4),双馈风电机组的三阶模型(3)改写成矩阵形式为

作为系统的Hamilton能量函数,为将模型(5)化为端口受控Hamilton(port-controlled Hamilton,PCH)模型,再设计控制率

其中K为预反馈和µ为输出反馈.取预反馈为

将预反馈K代入闭环系统(5),则系统(5)表示为[22]

式(7)-(8)满足PCH-D结构(4),其中J,R,G分别为

2.2 图论基础
海上风电场中的各个机组通过通讯网络相互连接,整个风电场可看作一个网络拓扑,风电机组通过控制策略相互协调.本文引入一些图论的基本概念,为后文分布式控制设计提供理论基础[23].
考虑系统中包含n个节点,节点之间主要通过图来表示节点之间的通信关系,通常将通信拓扑图记为G(V,E),V=(v1,···,vn)为节点的集合;E ⊆V×V为边集,每条边代表两个节点存在信息交流.如果连接两节点间的边是有向的,G(V,E)称为有向图;否则;称为无向图.边(vi,vj)表示节点能够获得节点的信息,每张图的邻接矩阵A={aij}∈Rn×n,当(vi,vj)∈E时,aij>0;否则,aij=0.在本文中,为便于分析,对于aij≠0情况,aij皆取1.
3 双馈风电机群输入时滞控制设计
近年来,电网的快速发展大大增加了系统结构和运行的复杂度,同时智能电网要求能够提高系统稳定性和灵活性.在广域控制系统中,远程量测信号和广域反馈信号在传输和反馈过程中会存在显著的时滞,使得电力系统变成时滞动力系统,同时时滞的存在使得原控制器在实际电力系统中的控制效果变差甚至会引起振荡,恶化系统的稳定性能.海上风电场位于电网远端,相距较远的风电机组工作于恶劣的海洋环境中,同时存在于广域信号中的时滞通常受传输距离和传输协议等因素影响,具有不确定性和随机性,即不同风电机组的时滞在一定区间内大小不同[24].为提高风电机组的稳定性,本文设计了基于时滞的海上风电机群协调控制策略.
3.1 单机输入时滞控制设计
本文针对风电机群输入含有时滞的情况,首先分析风电场中单个机组在时滞情况下的控制问题,在风电机组的PCH-D系统模型基础上,引入Casimir函数,通过扩展互连的方法塑造新的能量函数,将新Hamilton能量函数作为Lyapunov函数在扩展系统中的候选形式,使得扩展风电机组系统能够在原平衡点稳定运行[19].
3.1.1 问题描述
对于双馈风电机组这类多输入多输出非线性系统,本文将双馈风电机组的PCH-D模型作为研究的基础模型,考虑海上风电机组的单机PCH-D模型如下:
假设风电机组与远处的电力系统相连,则在测量信号中不可避免地存在时滞.考虑控制输入udr,uqs反馈当地测量信息和远程测量信息,因此将风电机组系统建模为含输入时滞的PCH-D形式,表示如下:

其中τ为风电机组的输入时滞.风电机组之间距离不等,机组受到的时滞是随机的常数,τmin为风电机组受到的最小时延,τmax为风电机组受到的最大时延,τ是满足τmin≤τ ≤τmax的不确定随机常数.
3.1.2 Casimir函数设计
实际的风电机组系统可以通过用PCH-D形式来描述,其Hamilton能量函数可作为Lyapunov函数的候选函数.为使得闭环风电机组系统在输入时滞下具有所需的稳定性能,通过互连来形成新的能量函数,选取源系统如下:

其中:ξ ∈Rn1,y1∈Rm,u1(t-τ)∈Rm;H1(ξ)为用于动态控制扩展的Hamilton函数.
设计反馈互连控制器为

将系统(10)与源系统(11)互连,得到以下扩展系统:

定义1函数ξk-ck(x,t-τ)(k=1,2,···,n1),
为系统(13)的Casimir函数,该函数满足

其中C(x,t-τ)=(c1(x,t-τ),···,cn1(x,t-τ)).
基于定义1,可以定义一个不变流形为

其中d1,d2,···,dn1为常数,则系统(13)就可以限制在该不变流形B上.为使得风电机组系统在含有输入时滞下仍能够保持稳定运行,现基于Casimir函数方法设计风电机组单机控制策略,具体定理如下.
定理1考虑海上风电场中含输入时滞的双馈风电机组(10),设计反馈控制器为

能够使得单机闭环系统(10)在输入时滞条件下保持稳定运行.
证对于输入时滞风电机组PCH-D模型(10),将控制器

代入互连后的扩展闭环系统(13)中,有

在条件(14)下继续整理得


其中Ha(x,t-τ)=H(x)+H1(x,t-τ).
引入Casimir函数ξk-ck(x,t-τ),H1(x,t-τ)可表示为

其满足Casimir函数存在的充分必要条件(14),扩展系统(13)的Casimir函数ξk-ck(x,t-τ)存在,此时可将Casimir函数取为ξ=C(x,t-τ),则

继而对Ha(x,t-τ)求时间t导数

原系统(9)的Hamilton能量函数为

由上证明可知,在风电机组输入含有时滞的情况下,可通过Casimir函数方法,结合风电机组的PCH-D模型进行扩展互连,设计状态反馈控制器,使得风电机组能够保持有效稳定的PCH-D形式,同时消除了输入时滞对系统的影响,保持系统的稳定运行.
3.2 多机输入时滞控制设计
海上风电场中含有多台风电机组,各机组通过通讯线路相互连接,并向电网提供电能.海上环境复杂多变,风电机组之间相距远近不一,每台机组受到的时滞受距离和环境的影响,在一定范围内随机变化.针对整个风电机群普遍存在输入时滞的情况,本节将上节提出的单机输入时滞控制器拓展至风电机群的协调控制,在网络化的风电机群系统中,设计基于时滞的分布式控制策略,解决整个风电机群存在不同随机输入时滞的控制问题,保证整个风电场的全局稳定,以及有功功率的稳定输出,进一步提高风电场运行的可靠性.
考虑海上风电机群,将单机PCH-D模型扩展,得到风电机群的PCH-D模型,具体如下:

其中下标i=1,2,···,N表示在整个风电网络拓扑中第i台单机.则含输入时滞的风电机群系统建模为以下PCH-D形式:

其中τi为每个风电机组的输入时滞,满足τmin≤τi≤τmax.
假设1海上风电机群构成的网络拓扑中,至少存在一簇有向生成树.
定理2考虑含有N台机组的海上风力发电机群(17),在风电机群系统输入含有随机时滞情况下(18),设计风电机群的输入时滞控制策略为

其中:τmin≤τi≤τmax,aij=1.在该控制策略作用下,风电机群中各机组能够在输入时滞下保持全局稳定,以及有功功率输出同步.
证设µi=µi1+µi2,可将其分为两部分

其中:µi1的作用是在机组输入含有时滞的情况下,保持机组为PCH-D稳定结构;µi2的作用是调节多台机组的输出,实现多台机组在分布式网络结构中的同步输出,从而实现整个风电场的稳定运行.
将风电场中的每台机组通过反馈互连控制器µi1与源系统(11)互连,得到扩展PCH-D系统为

再将控制策略µi2代入风电机群的输入时滞PCH-D模型(18)得

其中Hai(xi,t-τi)=Hi(xi)+H1i(xi,t-τi).
在Casimir函数ξik-cik(xi,t-τi)的表示下,可以得到

取整个系统的Lyapunov函数为

对Lyaponov 函数V(x,t)求导,并将控制策略µi代入V(x,t),可得


其中:LN是N个机组系统的Laplacian矩阵,输出y=[y1y2··· yN]T.考虑集合

依据LaSalle不变集原理[24],当t →∞时,风电机组稳定输出满足y1=y2=···=yN,当风电机组稳定运行时,可知Psi=Pmi.
当系统保持稳定运行时,风电机组的有功功率输出等于其输入机械功率[22].综上可知,通过利用Casimir函数方法设计相应的分布式时滞控制策略,能够确保风电机组在一定范围的输入时滞下相互协调,保持整个闭环网络系统的稳定输出.证毕.
综上分析,当海上风电机组的输入存在明显时滞时,通过引入Casimir函数方法互连反馈控制器保持系统在输入时滞下的稳定PCH-D结构,使得单机稳定运行;当一个海上风电场的风电机群都存在输入时滞时,对各机组进行网络化分布式时滞控制,使得各机组在输入时滞下相互协调,不仅消除了时滞的影响,同时保证了整个风电场的稳定运行,大大提高了风电场的稳定性和可靠性.
4 仿真验证
本文利用MATLAB 2014b软件进行仿真,验证在输入时滞条件下控制策略的有效性.首先,研究双馈风电机组单机输入带有时滞的情况,利用Casimir函数方法稳定时滞机组系统的输出,通过与无时滞控制、LMI时滞控制相比,验证了该控制方法在提高系统性能方面的有效性和优越性;其次,针对含输入时滞的双馈风电机群,将单机输入时滞控制扩展至含有多机的风电机群,对风电机群系统进行网络化协调时滞控制,使得整个风电场在输入时滞下仍能够保证输出同步、稳定运行.本节将选取一组有效的双馈风力发电机参数[21]:
4.1 单机输入时滞控制设计
考虑双馈风力发电机群中一台机组,因其与其他机组以及远处电力系统相连,则在控制输入反馈测量信息时,不可避免的存在时滞τ,此处τ为τmin≤τ ≤τmax的一个随机常数,为方便分析,只考虑距离对τ值大小的影响.在风电机组系统不失稳的情况下,对风电机组系统进行时滞裕度测试,Casimir函数方法能够有效处理的最小、最大时滞分别为τmin=30 ms,τmax=300 ms,而常用的LMI时滞控制在本文参数下能够处理的时滞范围为38~275 ms.对比一般的时滞处理方法,Casimir函数方法可以处理的时滞裕度更大,更适合做大容量电力系统的时滞分析.本节风电机组受到的时滞是在30~300 ms范围内的随机常数,如图1所示.
将Casimir函数条件(14)的G1(x)代入设计的控制器(16),得到


图1 反馈信号中的时滞Fig.1 Time delay in feedback signals
选取适当的初始值,风电单机仿真结果如图2-3所示,其中图2(a)-2(b)分别是单机系统输入含有时滞的输出响应曲线和有功功率输出曲线,图3(a)-3(b)分别是利用Casimir函数方法和LMI方法控制后,系统的输出响应曲线和有功功率输出曲线.

图2(a) 单机时滞输出响应Fig.2(a) The output response of single wind turbine under time-delay
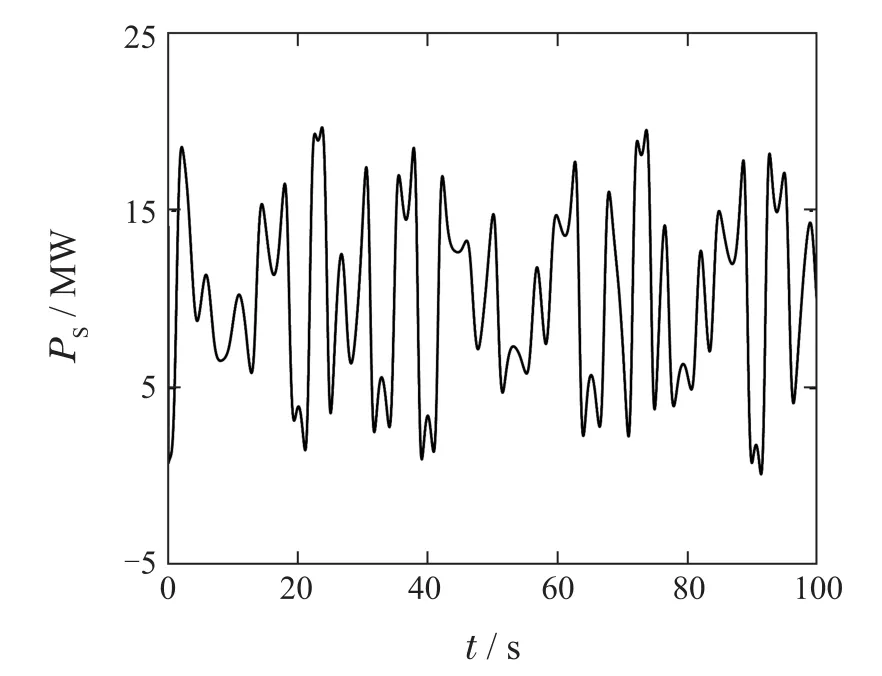
图2(b) 单机时滞有功功率输出Fig.2(b) The active power output of single wind turbine under time-delay
由图2可知,风电机组受到时滞时,系统的输出响应和有功功率输出均呈现出大幅振荡的不稳定形式,最大有功功率为PsMax=20.1 MW,1 s内功率变化最大范围为∇PsMax=18.06 MW,说明机组稳定的PCH-D形式受时滞影响而被破坏,使系统不稳定运行.

图3(a) 单机时滞控制输出响应Fig.3(a) The output response of single wind turbine under time-delay control

图3(b) 单机时滞控制有功功率输出Fig.3(b) The active power output of single wind turbine under time-delay control
由图3可知,机组的输出响应和有功功率曲线在短时间内有一定幅度的振荡,经过一段时间后,曲线的波动幅度减小,最后收敛稳定,整个系统在Casimir函数方法和LMI方法的作用下都可以实现稳定运行.风电机组系统在两种时滞控制方法下的性能参数见表1.

表1 性能参数Table 1 Performance parameters
从表1比较可以看出,对比LMI方法,本文Casimir函数方法控制下的风电机组,振荡幅度更小,收敛速度更快,振荡次数更少,同时稳态误差更小.说明Casimir函数方法不仅可以有效地解决输入时滞问题,保持单机系统的稳定,进一步提高了系统的稳定性能,同时相比于LMI方法,Casimir函数方法在提高系统稳定性和控制精度方面更具有优越性.
4.2 风电机群输入时滞控制设计
一个风电场内含有多台风电机组,多台风电机组都会受到广域信号时滞的影响,从而对风电场采用分布式时滞控制.为方便仿真和分析,在本节中,选取6台双馈风力发电机组组成的风电机群,其系统单线连接如图4所示.
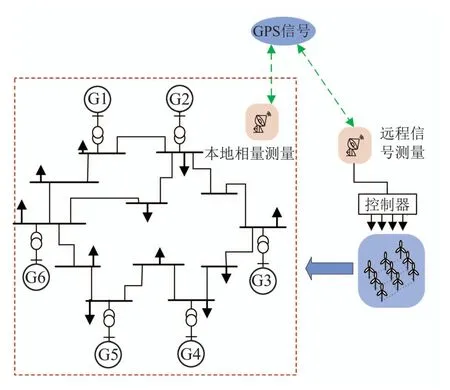
图4 风电场单线图Fig.4 The single line diagram of the wind farm
将图4的风电机组G1-G6看作节点,机组之间通过通讯线路相互交换信息,6台机组构成的网络结构在考虑通信方向后,可被简化为图5形式,其为含有有向生成树的连通图.

图5 海上风电机群网络拓扑图Fig.5 Network topology of offshore wind turbine group
各机组之间通过通讯网络连接,在运行过程中相互交换参数和状态信息等.对于分布式时滞控制策略式(19)中,µi2的作用是调节多台机组网络化的输出,其为一类分布式协同控制策略.对于图5中无时滞影响的6台风电机组,有向图5含有有向生成树结构,满足分布式协同控制策略设计条件(8),对各机组采用分布式协同控制,可以使得各机组相互协调,达到输出收敛一致的稳定效果.所以对无时滞影响的风电机群采用协同控制策略为

若机组i能够接收到机组j的参数和状态信息,取aij=1,对于图5中各机组的连接方式和信息输出方向,6台机组的分布式协同控制策略对应为

各机组在海上风电场中受到一定范围的随机时滞τ的影响,且不同机组的输入时滞τmin≤τi≤τmax随机不同.利用Casimir函数方法,对风电机群内部每台机组进行互连控制,再经过机组之间的分布式协同控制策略对含有6台机组的风电机群加以控制,从第3节定理2可知,对于带时滞风电机群的控制策略µi为式(19),而µi1和µi2可由式(20)和式(22)得到,所以6个机组的分布式控制策略分别为

受时滞影响的风电机群系统的仿真结果如图6-7.

图6(a) 风电机群时滞输出响应Fig.6(a) Wind turbine group output response under time-delay

图6(b) 风电机群时滞有功功率输出Fig.6(b) Wind turbine group active power output under time-delay

图7(a) 风电机组群输入时滞控制输出响应Fig.7(a) Wind turbine group output response under time-delay control

图7(b) 风电机组输入时滞控制有功功率输出Fig.7(b) Wind turbine group active power output under time-delay control
图6(a)-6(b)分别是风电机群在含有输入时滞情况下的输出响应曲线和有功功率输出曲线,图7(a)-7(b)分别是双馈风电机群在Casimir时滞控制下的输出响应曲线和有功功率输出曲线.表2是6个含时滞风电机组采用分布式时滞控制(23)后的稳定参数.

表2 风电机组参数Table 2 Wind turbine parameters
由图6可知,整个风电机群在输入时滞的影响下,每个机组的输出曲线都出现较大幅度的振荡,可知整个机群系统处于非稳定状态,时滞严重影响了风电场的正常运行.由图7可知,10 s内输出曲线和有功功率曲线具有短时间的振荡,且振荡幅度是减小的,在约10 s以后,输出曲线收敛至0,有功功率曲线收敛至10 MW,各机组输出和有功功率同步且保持稳定.从表格2看出,在6个机组中,有功功率振荡最大的为G4号机P4sMax=14.15 MW,6台机组的调节时间普遍都在10 s内,其中最快的是G1号机,其调节时间和超调分别为ts=5.58 s,σ1=0.076,6台机组的稳态误差都在0.04以内.各机组通过引入Casimir函数方法设计分布式时滞控制策略,一方面可以抑制时滞对系统产生的振荡作用,另一方面,各机组可以通过分布式控制相互协调,保证有功功率稳定且输出同步.风电机群通过分布式时滞控制后,系统收敛速度更快,超调和稳态误差更小,说明本文提出的分布式时滞控制方法有效地提高了系统的稳定性和控制精度.
5 结论
本文针对海上风电机组在运行过程中,输入时滞对机组稳定运行造成严重影响的情况,在Hamilton能量方法的基础上,引入Casimir函数方法,对输入时滞机组进行分布式时滞控制,保持机群系统的稳定.本文的主要创新点体现在下面两个方面:第一,针对双馈风电机组的输入存在范围为30~300 ms的随机时滞,在PCH-D模型的基础上,引入Casimir函数方法,设计互连反馈控制器,解决了系统因时滞产生的振荡问题,该方法设计过程简单,条件保守性低,提高了系统的响应速度、稳定性、控制精度等,具有良好的控制效果和优越性.第二,针对具有多台风电机组的风电机群系统,其内部机组输入受到不同的随机时滞影响,将单机PCH-D模型扩展至机群的PCH-D模型,基于Casimir方法,对输入时滞的风电机群系统设计分布式时滞控制策略,大程度地降低了风电场的通信负担,又提高了风电机群的可靠性和稳定性,对实际风电场控制具有一定的指导意义.总之,本文方法在发电性能、系统简化和成本效益等方面都是有利的.
