基于最小速比偏差的注塑机双曲肘合模机构优化设计
2021-01-08董凌波张哲衍李国平陈星欣娄军强
董凌波, 张哲衍, 李国平,2, 陈星欣, 娄军强,2, 柳 丽,2*
基于最小速比偏差的注塑机双曲肘合模机构优化设计
董凌波1, 张哲衍1, 李国平1,2, 陈星欣3, 娄军强1,2, 柳 丽1,2*
(1.宁波大学 机械工程与力学学院, 浙江 宁波 315211; 2.浙江省零件轧制成型技术研究重点实验室, 浙江 宁波 315211; 3.海天塑机集团有限公司, 浙江 宁波 315800)
注塑机合模机构的性能直接影响注塑制件的质量、效率以及注塑设备的寿命. 以企业指定380T锁模力的双曲肘合模机构为研究对象, 提出将肘杆机构原型速比曲线与理想速比曲线的最小偏差值加入优化函数, 结合机构总长、行程比、力放大比等进行多目标优化设计, 并进行仿真验证. 结果表明: 在合模机构总长、移模行程满足要求的基础上, 力放大比增大12.24%, 临界角处速比降低14.49%, 且合模周期减少6.6%, 可有效提升合模机构的综合性能.
注塑机; 双曲肘内翻式; 合模机构; 最小速比偏差; 多目标优化
双曲肘合模机构是三板式注塑机最常用的形式, 其具有机械结构带来的力放大作用(也称机械增益)、合模时自锁以及匀速驱动下动模板产生慢- 快-慢速度特性等[1]一系列符合注塑工艺要求的优点. 双曲肘合模机构有内翻式和外翻式之分, 其中内翻式具有结构紧凑、简单的特点, 因此在中小型三板机中被广泛使用.
肘杆机构的性能包括动力学和运动学两方面. 其力学性能的评价指标主要是力放大比, 其决定机构的机械增益大小; 运动学性能指标主要包括行程比和速比, 影响合模机构的运动平稳性和运动效率. 目前, 国内外学者根据不同的工作情况和用户需求, 针对一个或多个性能指标进行了肘杆机构的结构参数优化研究. 如刘晓彬等[2]考虑了轴销的回转直径与后模板铰点定位尺寸在优化算法中对合模机构性能的影响, 运用遗传算法对肘杆机构进行以力放大比为目标的单目标优化. 文献[3-6]以机构总长、曲肘角为3°时力放大比以及行程比为目标对肘杆机构进行优化. 邵珠娜等[7]利用ADAMS软件建立了肘杆机构参数化模型, 通过优化设计参数值结合驱动方式, 得到了较为理想的动模板速度曲线. 文献[8-9]为减小动模板速度波动, 提出了动模板速度平稳性的计算方式, 以力放大比为目标函数, 采用遗传算法进行肘杆机构参数优化, 使动模板的运动平稳性有了很好的改善, 但合模效率有所下降.
本文针对企业特定机型需求, 以机构总长、行程比、力放大比为目标函数, 结合实际速比曲线与理想速比曲线最小偏差值, 对注塑机双曲肘合模机构进行了多目标的性能优化.
1 合模机构运动学分析
双曲肘肘杆机构为对称结构, 图1为肘杆机构上半部运动简图. 图1中实线部分为肘杆机构合模的极限位置, 虚线部分为开模的极限位置. 根据机械原理, 可以将其看成2组曲柄滑块机构[10], 一组由大曲肘(1)、大连杆(2)和相当于滑块的动模板组成; 另一组由小曲肘(3)、小连杆(4)和相当于滑块的十字头组成. 大、小曲肘刚性连结, 在十字头运动时, 小连杆带动它们以同一角速度绕后支铰点旋转, 大连杆随之运动, 同时带动与其在点铰接的动模板水平移动. 其中:为斜排角;和分别为小连杆、大连杆与水平线夹角;为大小曲肘之间的楔角;为曲肘以合模状态为初始状态下转过的角度;为铰点到十字头中心的距离;为十字头半长;m与o分别为动模板行程与十字头行程.
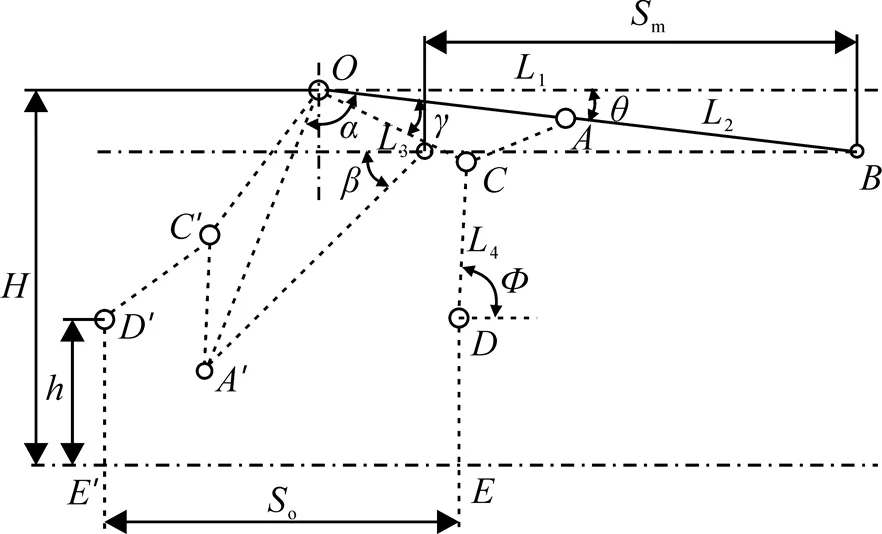
图1 肘杆机构运动简图
本文以企业指定380T锁模力的双曲肘合模机构为研究对象, 各参数取值为:
式中:为与的差值.




合模机构的速比v为动模板与十字头速度之比, 与力放大比呈倒数关系. 通常假定十字头匀速运动, 此时合模机构的速比曲线与动模板曲线变化规律一致, 可以评判合模机构的运动稳定性与合模效率, 可由式(5)计算:
2 数学模型的建立及遗传算法解算
2.1 设计变量
2.2 目标函数
在保证额定锁模力大小、动模板移模行程不减少的情况下, 为达到优化合模机构尺寸和运动平稳性, 本次优化同时考虑动模板速比变化, 将原型速比曲线与理想速比曲线的最小偏差值作为优化目标之一.
2.2.1 最小速比偏差分析
根据原型机构各参数及式(5), 在Matlab软件中作出原型机构开模过程的速比曲线(图2). 由图2可知, 速比曲线存在4个关键点, 分别为临界角处速比、局部最大值速比、局部最小值速比和开模极限处速比.
式中: 为标定锁模力, 380kN; 为合模机构综合刚度, 2×108N·m-1.

2.2.2 目标函数
2.3 约束条件
2.3.1 防自锁和干涉约束
为防止肘杆机构在开模阶段出现自锁, 且考虑摩擦影响, 根据经验需在开模时预留角度:

杆长比应该在0.7~0.9之间, 即


为保证肘杆机构各杆之间能相对回转, 肘杆机构需满足:

考虑到2组曲肘机构的对称性, 避免上下肘杆发生干涉, 有:
式中:D、C、A分别为点、、处铰孔直径.
2.3.2 定义域约束

2.3.3 目标约束

企业设计要求优化后合模机构移模行程不小于700mm, 故有: