针织结构柔性传感元件的拉伸电学性能
2021-01-07张莹莹沈兰萍翟娅茹
张莹莹,沈兰萍,翟娅茹
(西安工程大学 纺织科学与工程学院,陕西 西安 710048)
0 引 言
2018中国服装杭州峰会暨首届中国服装智能制造大会的举行,人工智能、大数据、智能可穿戴等话题便成为热点[1-2]。传感器是智能可穿戴服装的重要组成部分[3-4],普通传感器柔软性、舒适性较差,不能满足智能纺织品的使用要求,因此柔性传感器应运而生。柔性传感器柔韧性好[5],可延伸、弯曲与折叠[6-7],能使纺织品快速实现自适应的动态变化,如通过新型油墨3D打印制成一种模拟人体皮肤质感和灵敏度的新型压阻式传感器[8]。目前柔性传感元件的种类主要有纱线型和织物型,织物型柔性传感元件更能保证精度的有效性和可行性[9]。随着纺织材料与技术[10]、柔性集成与传感技术[11]、智能可穿戴技术[12]、新型智能机器人等的发展,纺织结构的柔性传感元件已逐步应用到各领域[13],如采用电纺丝聚合物纤维垫制成的柔性电阻型应变传感器,可监测人体运动[14]。针织物因其线圈结构而具有良好的拉伸弹性,且舒适贴身、质轻,易衬入导电传感材料作为柔性传感器的载体。研究表明,在小拉伸应变下,针织柔性传感元件在单元线圈间的接触力变化微小,使其电阻发生改变的决定性因素是线圈间发生了纱段转移[15]。蔡倩文等用不同导电纤维制备柔性传感器,测试不同行、列的导电性能,结果显示其局部电阻测试规律与文献建立模型基本吻合[16]。方方等采用SOFTCEPTOR柔性传感器进行定伸长重复循环拉伸实验,结果显示其灵敏度很高,弹性回复率高达96%,但其重复性较差,在实际使用中需对输出电阻进行误差补偿[17]。郭秋晨等采用不同导电纱线制备了不同传感区的柔性传感器,发现镀铜锦纶丝针织柔性传感器的电阻与应变呈线性关系[18]。
现有研究以对不同组织进行一种动态变化的电学性能研究,以及不同导电纱线柔性传感器的传感性能研究为主。针对针织结构下不同运动状态的电学性能,本文设计开发3种不同组织结构的针织柔性传感元件试样,测试其在不同动态下的电阻变化情况,研究柔性传感元件的电学性能。
1 实 验
1.1 原料及仪器
1.1.1 原料 不锈钢纤维。线密度为78.8 dtex,电阻率为4.21×10-5Ω·cm,伸长率36.32%,强度2.2 cN/dtex,模量20.82 cN/dtex。
1.1.2 仪器 Instron 5565万能强力拉伸仪(美国英斯特朗公司),YF132B-XG-Ⅲ电脑横机(德国斯托尔),Agilent 34401A数字万用表(深圳市世家仪器有限公司)。
1.2 针织柔性传感元件制备
针织物由线圈相互穿套而成,其电阻会随着线圈形态的变化而发生改变,根据针织物的线圈特点,用电阻六角模型构造结构特征[15]。选取纬平针、1+1罗纹和2+2罗纹等3种最简单常用的针织结构,这3种组织不仅满足电阻六角模型规律,且满足柔性传感元件的基本要求,即织物在横、纵向均具有良好的弹性和延伸性。设计并在电脑横机上试织3种柔性传感元件试样,试样参数见表1,试样规格为20 cm×10 cm。
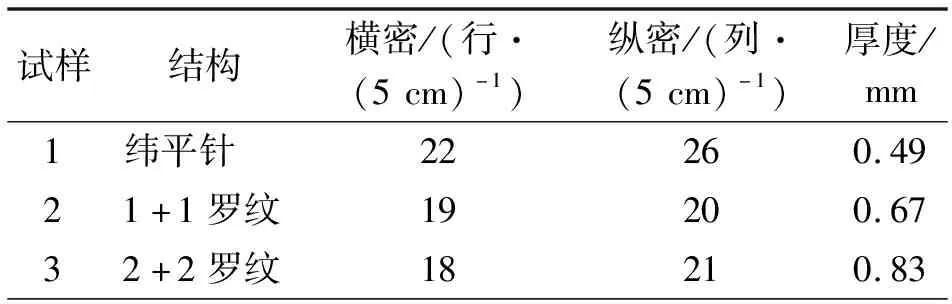
表1 柔性传感元件试样参数
1.3 测试方法
1.3.1 相同拉伸速率下的电阻 夹持长度10 cm,试样拉伸总长度25 mm,预加载荷0.5 N,拉伸速度100 mm/min,测试模式为“结束并返回”,万用表设定6位分辨率。
1.3.2 不同拉伸速率下的电阻 在拉伸速率为50 mm/min、100 mm/min、200 mm/min、400 mm/min时,对3种不同结构的试样进行拉伸,测量电阻值变化。
1.3.3 循环拉伸状态下的电阻 拉伸速率为100 mm/min,每次将试样拉伸至规定伸长率后,待上夹头至初始位,将拉伸仪的位移设为0,以便下次试样拉伸到达25 mm后可自动返回,循环周期设置为20次。20次循环中选取第1个3次和最后1个3次循环的测量值,比较其电阻差值的大小,值越小说明重复性越好。
1.3.4 拉伸疲劳性 试样尺寸20 cm×6 cm,使用Instron强力机,在PC端设定拉伸速度为100 mm/min,夹持隔距为100 mm,实验疲劳次数为20次,最大拉伸率为50%。到达最大拉伸位置时保持1 min,待试样回复后静置2 min,得到其拉伸疲劳情况。
1.3.5 柔性传感元件精度 柔性传感元件的精度用灵敏度(G)来表示,电阻变化量越大,灵敏度越高,其公式如下:
(1)
式中:R为拉伸后柔性传感元件的电阻值,Ω;R0为原始电阻值,Ω;ε为柔性传感元件的伸长率,%。
2 结果分析
2.1 不同拉伸方向下柔性传感元件的电学性能
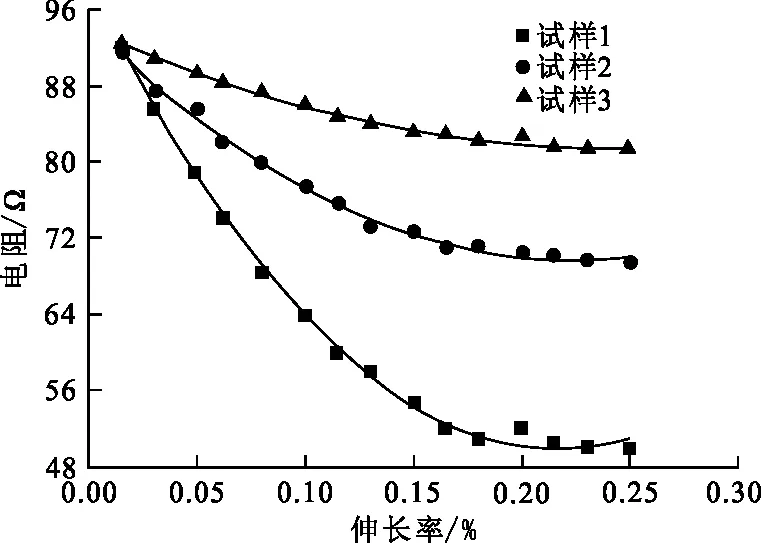
3种试样的电阻与伸长率的关系如图1所示,灵敏度计算结果见表2。
(a)横向拉伸

表2 横、纵向拉伸下的灵敏度
由图1可知,3种试样随横、纵向伸长率的增加电阻均呈下降趋势,但横向拉伸电阻变化比纵向电阻变化小,因此相同条件下纵向拉伸的灵敏度比横向高。这是因为试样在纵向拉伸时,线圈接触压力增大且接触点增多,试样电阻变化更大,灵敏度高;而横向拉伸时试样易伸长,使拉伸变化延迟致使接触点较少,电阻变化量较小,故而灵敏度低。用于柔性传感元件的灵敏度不能低于1.44[16],由表2可知,横向拉伸下试样1的灵敏度在规定区间,纵向拉伸的灵敏度均较高,试样1的灵敏度最高。这是因为试样1结构紧密,拉伸时线圈连接处的接触力增大,使电阻变化量增大,灵敏度高;而试样2、3均是罗纹组织,结构疏松,拉伸时易发生形变使接触力变化延迟,电阻变化量较小,灵敏度低。
2.2 拉伸速率对柔性传感元件电学性能的影响
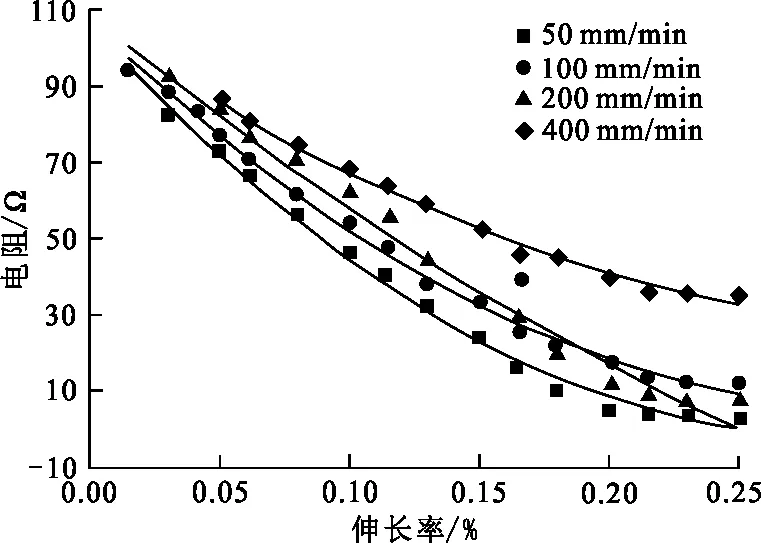
不同拉伸速率下3种试样的电阻与伸长率的关系如图2所示,灵敏度计算结果见表3。
(a)试样1
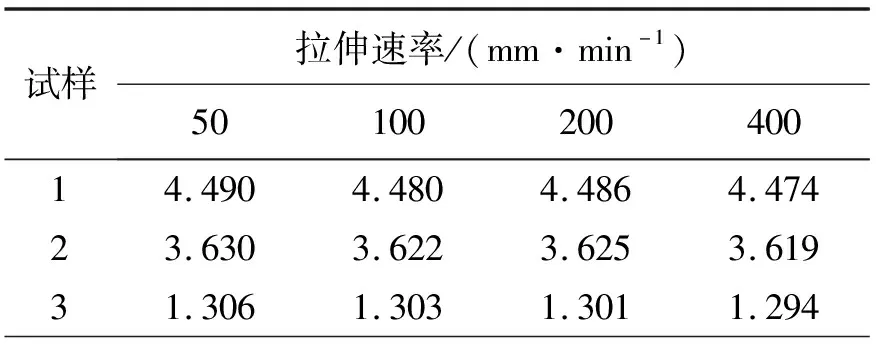
表3 不同拉伸速率下3种柔性传感元件的灵敏度
由图2及表3可知,3种试样均在低速拉伸时电阻变化较大,高速拉伸时电阻变化较小,且低速拉伸时灵敏度高,其中试样1灵敏度最高。这是因为在低速拉伸时,试样随应力的缓慢增加而快速作出响应,使电阻值立即发生改变;当拉伸速率加快时,试样来不及做出响应,电阻值不会立即变化,导致低速拉伸时灵敏度高,高速拉伸时灵敏度低。试样1为纬平针结构,组织紧密稳定,线圈间的接触也较紧密,因此受到拉伸时,线圈连接处的接触力增大,电阻变化量增大,灵敏度高,而试样2、3结构较松散,拉伸时易发生形变,接触力变化延迟,电阻变化量小,灵敏度较低。
2.3 循环拉伸对柔性传感元件电学性能的影响
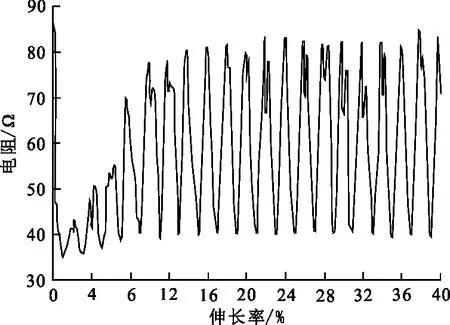
重复性可以间接评价传感元件的耐用性,3种试样循环拉伸20次的电阻变化如图3所示,计算所得重复性结果见表4。
(a)试样1
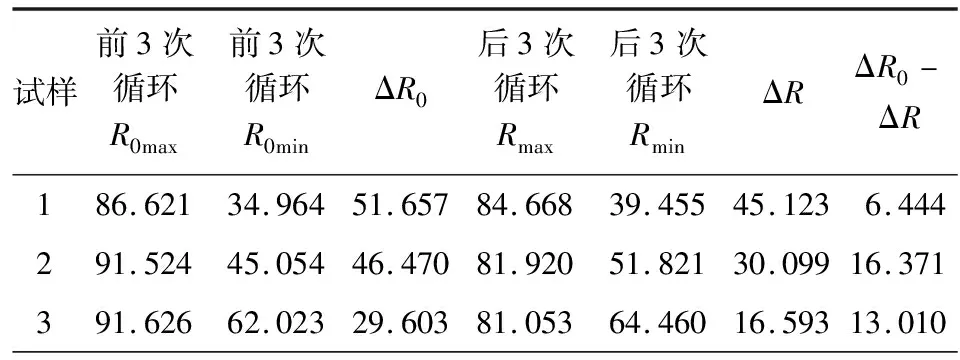
表4 试样重复性
由图4可知,在20次循环拉伸中,3种试样电阻变化均为拉伸时降低,回复时增加,但在初始循环回复到原位置时电阻值减小,随着整个循环拉伸的进行,回复电阻逐渐增大。这是因为拉伸时试样间的接触力逐渐增加,使电阻降低;回复时由于针织物的回弹性使线圈间产生小部分塑性变化,接触力相对于拉伸时减小,故电阻逐渐增加;在初始拉伸循环中,前一次拉伸力释放后,试样还未回复到原始状态就开始下一次拉伸,因此在初始拉伸循环中,回复电阻值远低于原始电阻值,而在多次循环拉伸后,试样弹性回复稳定,电阻变化稳定,回复电阻值接近于原始电阻值,但由于回复时没有完全克服摩擦力,故电阻值不会回复到原始形态。由表4可知,试样1的电阻差值最小,重复性最好,这是因为试样1的纬平针结构稳定,循环拉伸下结构变化小;而2种罗纹试样结构疏松易变形,随着拉伸次数的增加,试样结构产生变化,重复性变差。
2.4 循环拉伸对柔性传感元件结构的影响
根据1.3拉伸疲劳性测试的方法进行实验,3种试样20次循环拉伸的结构变化见表5。
由表5可知,3种试样在20次循环拉伸中,试样1蠕变较小,试样3蠕变最大。这是因为试样1的结构紧密,线圈形态小,使得不同线圈间的联系增强,外力作用于试样1时,线圈间的作用力大从而产生的蠕变较小,试样本身具有的弹性回复力使得较小蠕变回复,具有良好的尺寸稳定性;试样2、试样3的结构疏松,线圈间的作用力小于外力,使得试样在拉伸过程中产生形变,甚至超过了其弹性回复力,从而产生较大的蠕变及明显的弹性回复滞后行为。但3种试样的蠕变量均不超过10%,具有一定的形变回复能力和抗疲劳性能。
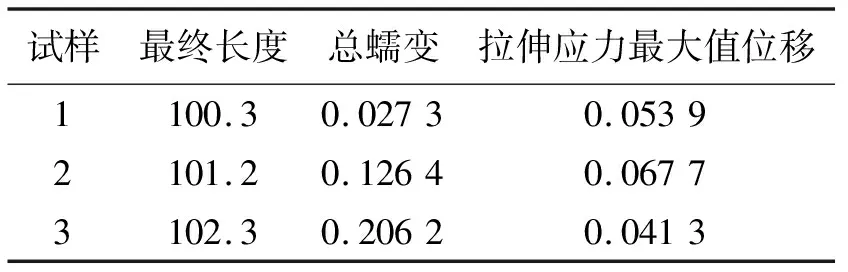
表5 3种试样20次循环拉伸的负载参数
3 结 论
1)3种试样电阻随横、纵向伸长率的增加均呈下降趋势,横向拉伸电阻变化小于纵向,纬平针试样的电阻变化量最大,灵敏度最高。
2)3种试样在低速拉伸时的电阻变化量比高速时大,低速拉伸时均表现出高的灵敏度,且纬平针试样灵敏度最高。
3)3种试样在循环拉伸中,拉伸时电阻降低,回复时逐渐增大,且初始拉伸循环中回复电阻值远小于原始电阻值,多次循环拉伸后回复电阻逐渐增大,接近原始电阻值,且纬平针试样的重复性最好。
4)3种试样在循环拉伸中,蠕变量均不超过10%,具有一定的弹性回复能力和抗拉伸疲劳性能,且纬平针具有良好的尺寸稳定性,罗纹试样具有明显的弹性回复滞后行为。