基于GEO的低轨航天器星间通信链路控制系统设计
2021-01-07孙鹤锋周学军
孙鹤锋,周学军
(延安大学 物理与电子信息学院,陕西 延安 716000)
0 引言
近几年航天工业有了长足的发展,包括如人类空间和探月高新技术也在不断发展,因此低轨道的飞船数量和种类大量增加。
有些大型的低轨道航天器需要下载大量的各种科学实验数据[1],而传统的低轨道航天器则相对简单。从卫星上下载的信息通常依靠卫星之间的链路传送到地面的全球站。这种方式会受到卫星数量、卫星成本等多方面因素的影响[2-3],为此就需要拓展新型、高效的传输方式,解决这类低轨道航天器所面临的海量科学实验数据的实时下载问题。
通过研究国内外文献得知,低轨航天器可以采用一种新的基于静止轨道(GEO)通信卫星转发的传输方式,即利用 GEO通信卫星向地面转发信息[4-5]。由于 GEO通信卫星在低轨航天器中传输困难,主要原因是上下行带宽不对称,可用链路时间有限,拓扑结构变化频繁,难以达到传统地面网络技术所能达到的服务质量和可靠性要求[6]。本文在研究网络架构的基础上,设计了一种新的低轨航天器星间通信链路控制系统,对系统的硬件和软件进行研究,并通过实验研究了系统的可行性。
结合国内外相关文献,提出了近低轨道航天器可以在地球同步轨道通信卫星传输的基础上,采用一种新的传输方式,即利用地球静止轨道(GEO)通信卫星将信息传送到地面。GEO通信卫星在低轨道航天器中存在传输困难、上下带宽不对称、可用链路长度有限、拓扑结构多变等问题,无法满足传统地面网络技术对服务质量和可靠性的要求。本文基于网络结构的研究,设计了一种低轨道航天器星间通信链路控制系统,研究了该系统的硬件结构和软件结构,并对其可行性进行了实验研究。
1 基于GEO的低轨航天器星间通信链路控制系统硬件设计
基于GEO的低轨航天器的星间通信主要通过星间通信链路进行数据传输,基本原理如图1所示。
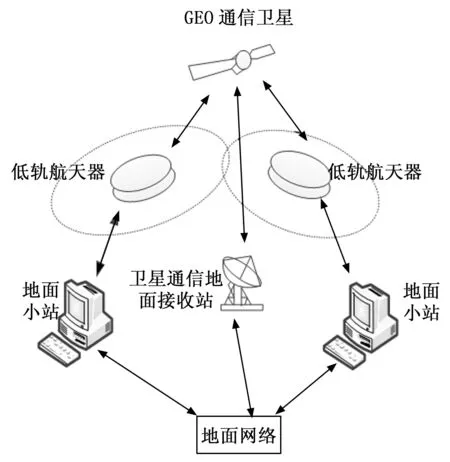
图1 基于GEO的低轨航天器星间通信链路示意图
该链路由地面信号接收站、GEO 通信卫星低轨航天器、地面及卫星通信网络链路等组成。低轨航天器分布在卫星和地面接收站之间,因此,低轨航天器有两种渠道可以进行信息的传输:第一,通过和通信卫星之间的链路将信息传给卫星,再由卫星传输给地面接收主站;第二则是直接传输给对接的地面接收站[7-8]。
从图1中可以看出,低轨航天器在空间中是不断运行的低轨节点,因此,通信链路相对具有一定的空间移动范围和动态捕捉功能,以便能够实时与低轨航天器进行对接和信号传输[9-10]。
一般大型低轨航天器数据传输数量规模较大,需要依靠星间通信链路和通讯接收站等将信息层层下传传输到地面。这个过程会受到空间卫星数量、链路传输能力和通信接收站储存量等多方面条件限制。对此,针对传统的星间链路系统设计存在的问题,本文对低轨航天器的星间链路传输系统硬件设施进行了改造设计。
星间链路的主要设备大致包括星间信号发射器、信号接收传感器、发射天线、接收天线和高增益天线等。本文改进的链路系统,首先通过运算程序提前将信号发射角度与距离计算出来,然后将空间信号发射器、接收天线按照计算结果进行角度和方位调整。这样能够使星间信号发射波束能更准确快速传输到下一个节点,减小方位误差造成信号接收失误的可能。
在发射器内部系统中,将设备通信编码方式改为卷积编码。在星间信号发射器上,通过卷积编码程序对采集到的信息进行分析运算,得到解算筛选后的数据编码,然后再进行信号数据传输。这种二次数据代码编译方法降低了信号数据的复杂和混乱程度,使星间通信链路接收到错误数据代码的概率下降,同时也使链路通信的效率更高。星间链路的设计思路如图2所示。

图2 星间链路设计思路
图2为本文设计的星间发射系统、接收系统与接收天线的安装结构[11]。假设A为星间链路的发射系统,B为星间接收系统,在进行系统安装设计时,计算发射信号波束的角度和方位,将发射角度记为a,则发射系统天线调整角度为-X方向的a角度,星间接收系统天线的方位调整为+X方向的a角度,从而使星间天线处于一条水平线上,减少了信号方向迷失和环境干扰造成的误差,使星间信号传输路径更直接准确。
图3是星间发射系统和接收系统的工作运行系统设计结构。星间发射系统对信息进行基本筛选分析之后,再通过卷积编码程序进行数据代码编译重组,再通过扩频设备对发射波束进行数据发散和方位调制,然后发射成型的信号波束,并通过信号过滤设施过滤杂余信号形成完整的发射滤波,在调整放大变频和发射功率之后,信号波束即能通过星间发射天线向目标方位进行辐射传输。而星间接收器在星间接收天线接收到信号辐射后,通过系统内部降噪除杂,将信号数据放大并调整降低变频,使信号稳定清晰,再对信号进行分解拓展,通过维特比译码对原始数据进行分析破译,重组之后得到信号发射系统所要传输的具体信息[12-13]。
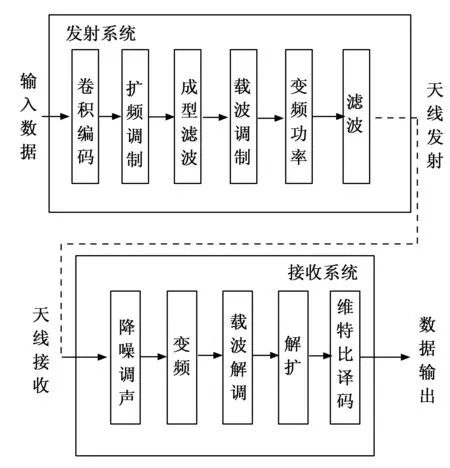
图3 星间链路系统设计示意图
2 基于GEO的低轨航天器星间通信链路控制系统软件设计
空间网络传输技术研究是低轨航天器空间链路通信系统软件设计中的重要一环。针对空间网络所具有的动态性、不稳定性和资源有限等问题,基于GEO通信卫星低轨航天器运行轨迹和数据传输的特点,实现在低轨航天器网络协议自由转换[14]。
双协议栈传输系统设计的主要内容包括以下几个方面:
1)星地链路协议设计。由于低轨航天器向地球传输信息时容易受到大气环境、地面遮盖物和磁场引力等影响,会导致地面接收到的信息出现遗漏缺失等误差,因此,不仅要在星间也要在星地之间设计双协议栈,减少低轨航天器高速运动和外部环境等因素造成的影响,以保证向地面传输的数据信息更加完整可靠。
一般低轨航天器与地面接收站的距离较远,且位置并不固定,动态性较强。SCPS-TP传输协议能够减少空间通信传输时间延长、数据错误率高等现象,而且针对动态运行的低轨节点,能够更好地完成信号对接与数据传输。
2)星间链路协议设计。星间链路通信环境相对比较统一,受到意外干扰因素较少,但星间链路进行数据传输的延时性较大。因此,选择在缩短延时方面比较有优势的LTP协议,作为星间链路配置的协议。低轨航天器双协议栈传输系统设计示意图如图4所示。
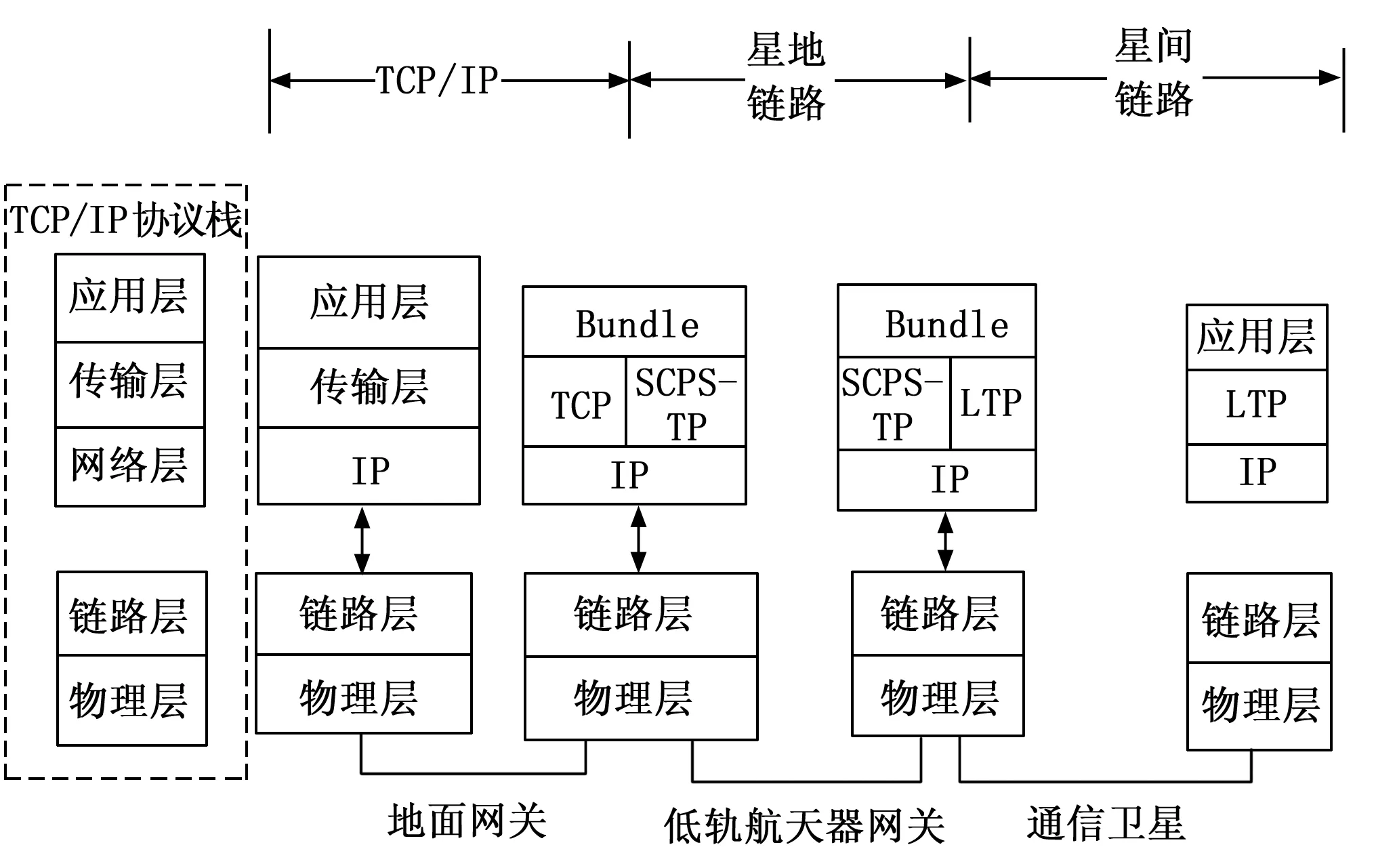
图4 双协议栈传输系统设计示意图
如图4所示,在装置了双协议栈的低轨航天器传输信息时,首先要采集并检测所传输信息的下一站节点,判断航天器是向通信卫星传输信息,还是向地面接收站传输信息[15]。若下一站节点是通信卫星,那么启动LTP协议配置;如果下一站节点是地面接收站,则启动SCPS-TP协议配置。两种协议能根据信息传送的不同对象进行灵活转换,极大地提高了数据传输的准确性和时效性。
对于地面网络接收系统,采用Bundle+TCP/SCPS TP+IP网关协议栈,实现这两种协议在地面网络实现自由的转换。地面网络接收星间传输信号时,Bundle层需编写相应的 SCPS-TP汇聚程序才能与SCPS-TP协议进行信号通信;同样,需要通过相应LTP汇聚层系统程序实现星间通信。
星间链路与地面网络进行通信之前,需要根据该地面网络的Bundle层服务配置对传输信息进行调整,使数据符合Bundle协议的接收型号要求。再通过汇聚层程序对接收信号进行分类处理,传交给地面TCP协议,根据协议要求检测信号,若符合要求即可与星间通信设备进行通信链路对接和网络搭建。建立好通信链路之后,Bundle层接收来自星间的数据信号碎片,接收完毕后通过数据组装编译程序形成完整的数据信息,并将其通过TCP协议传输给地面网关工作人员的服务器通信系统中。
上述内容是低轨航天器的星间链路与星地链路控制系统软件设计的基本设计思路。由此可见,本文提出的双协议栈传输通信软件设计比传统的星间通信链路控制系统软件设计性能更优。
3 实验结果与分析
为探讨本文提出的基于GEO的低轨航天器星间通信链路控制系统的有效性,设计对比实验。
3.1 实验步骤及方法
利用终端PC和网络损伤仪组成实验环境,针对连接时间和断开时间进行测试,分析协议的运行性能。设定的实验环境如图5所示。
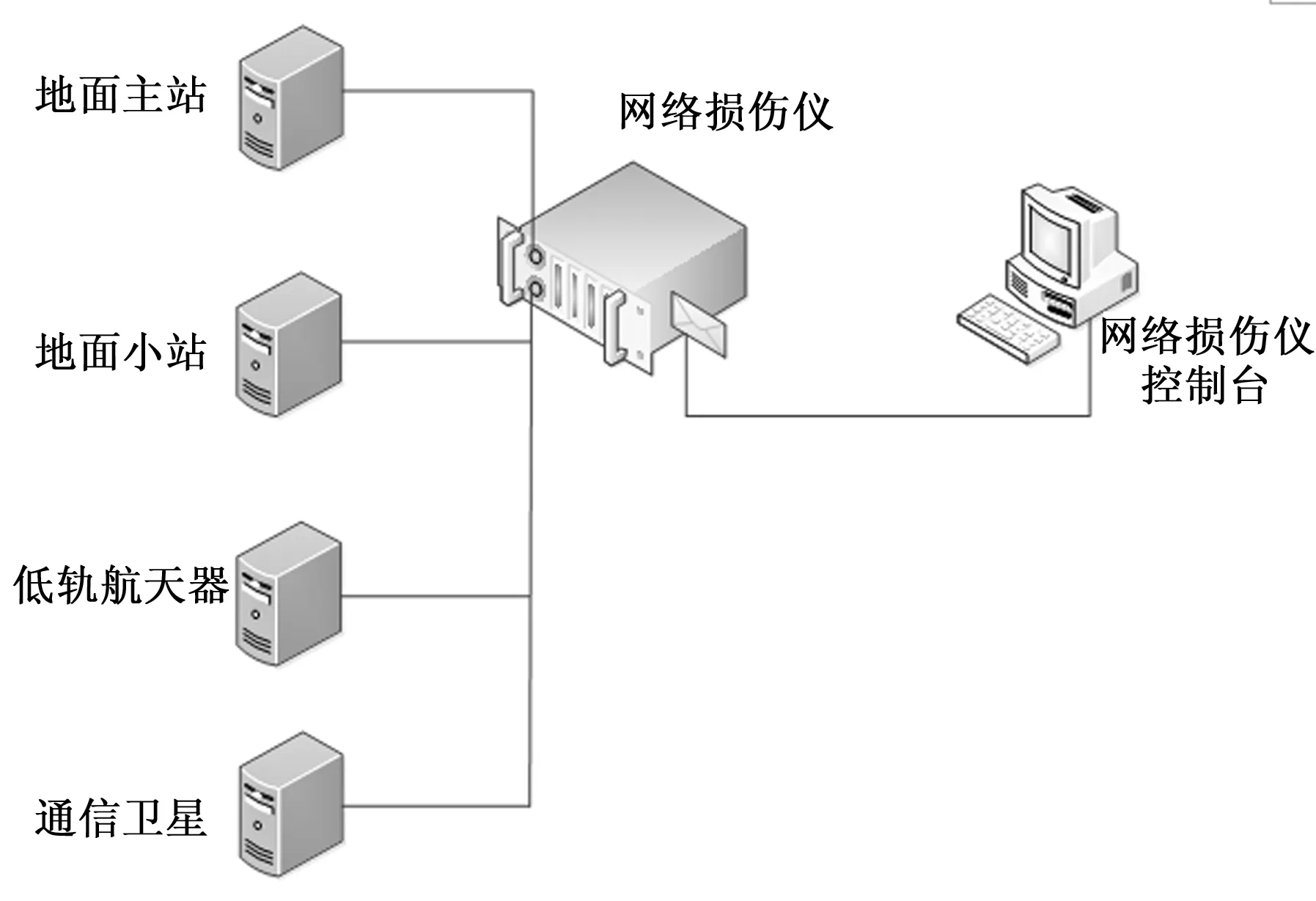
图5 实验环境
根据图5实验环境,对低轨航天器星间通信链路进行控制,设定实验参数,如表1所示。

表1 实验参数表
在误码率为10-6的条件下,分别使用本文提出的基于GEO的低轨航天器星间通信链路控制系统与传统的基于天线跟踪的低轨航天器星间通信链路控制系统、基于自扰控制器的低轨航天器星间通信链路控制系统对航天器进行控制,采集不同控制系统的传输速率,分析控制系统俯仰角和方位角的响应曲线,最后得到航天器星间链路的角速度、角加速度、角度指向的误差曲线。
3.2 实验结果分析
得到的传输速率如图6所示。

图6 传输速率实验结果
分析图6可知,在误码率为10-6的情况下,本文提出的基于GEO的低轨航天器星间通信链路控制系统的下行平均传输速率为4.8 Mbit/s,传统的基于天线跟踪的低轨航天器星间通信链路控制系统的下行平均传输速率为3.1 Mbit/s,基于自扰控制器的低轨航天器星间通信链路控制系统的下行平均传输速率为2.7 Mbit/s.由此可见,本文提出的控制系统能够有效提高低轨航天器对于信息的传输速率,加强信息传输能力。
在确定不同控制系统对传输速率的控制效果后,对星间链路通信现场进行实验,针对A星和B星的链路通信进行控制,设定A星发射面为-X面,B星的接收面为+X面,天线在A星的上方位角为180°,在B星的上方位角为0°,在A星的俯仰角为0°,在B星的俯仰角为0°。使用不同的控制系统对低轨航天器星间通信链路间进行控制,分析不同系统下的俯仰角和方位角响应曲线,得到的实验结果如图7所示。
根据图7可知,基于GEO的低轨航天器星间通信链路控制系统能够有效分析不同链路之间的行驶轨迹,以平滑的模式处理各个模式,本文提出的方式针对俯仰角和方位角通道进行控制解耦。
通过图7得到角速度、角加速度、角度指向的误差曲线。

图7 俯仰角和方位角响应曲线
分析图8可知,本文提出的控制系统对于角速度误差控制能力高于传统系统。由于通信卫星体积相对较小,储存与通信能力受到功率和卫星硬件设施质量等因素制约,低轨航天器与卫星之间的星间链路和通信传输也会受到相应程度的限制。因此,低轨航天器星间链路的发射器、星间天线、接收器等设备,按照计算调整好的角度方向进行安装配置,并调整发射数据信号为窄信号波束,采用高增益的发射功率、卷积编码和维特比译码等数据编译重组程序,能够使信号发射方向更准确,信号接收准确率更高,受到空间环境影响的情况大大减少。除杂系统的设计减少了多余信号对传输信息的干扰,通过二次编译后的数据更准确可靠,错误代码接收情况也得到了良好的改善。
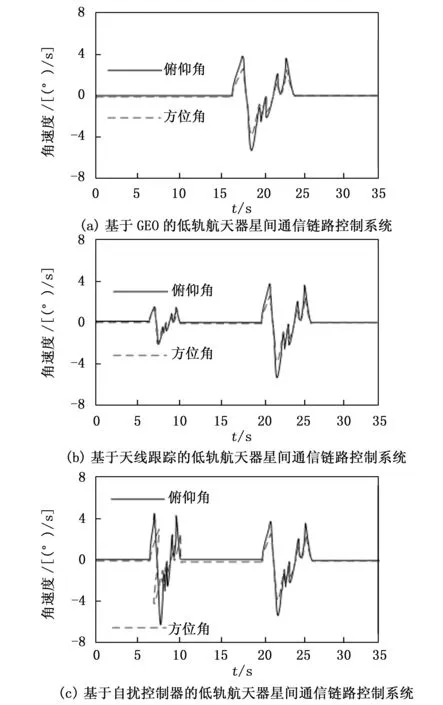
图8 角速度误差曲线
根据图9可知,本文提出的控制系统通过双协议栈技术,低轨航天器动态运行的不稳定性对通信链路和信号接收的影响得到良好改善;受空间环境、磁场等因素导致数据传输代码错误的情况也大大减少,能够很好地减少角加速度误差。
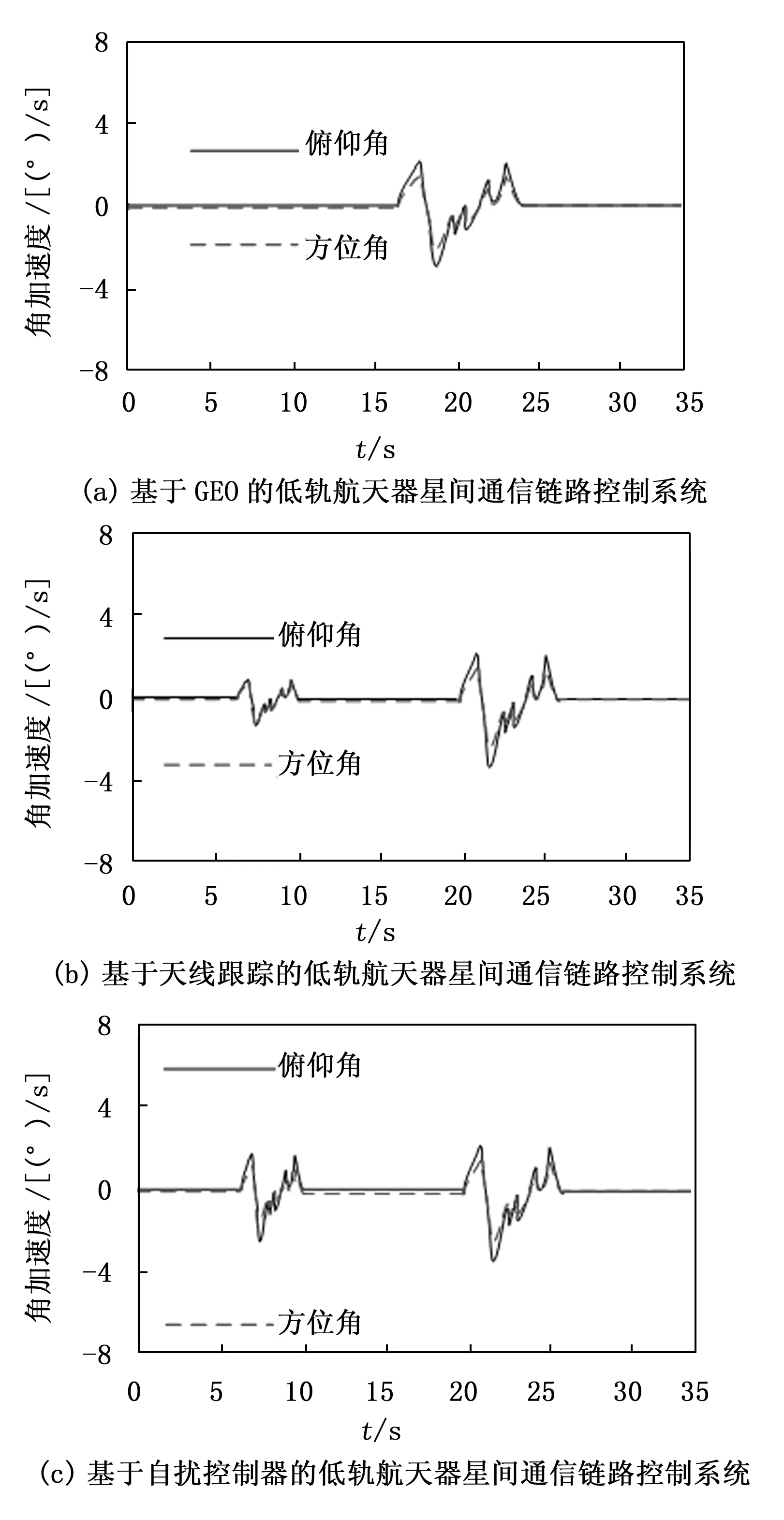
图9 角加速度误差曲线
由图10可知,在跟踪状态下,不同的控制系统控制能力都很强,控制误差能够达到0.001°数量级,但是在稳态后,传统的控制系统控制误差过大,控制数量级在0.002°甚至更高。由此可见,本文提出的控制系统具有很强的指向控制能力,对内部控制参数的变化有很强的鲁棒性,能够抑制耦合干扰,实现高精度的控制目标。

图10 角度指向误差曲线
综上所述,所提方法的控制系统能够在较短时间内达到稳态控制,指向控制能力较好,下一步将针对控制精度对所设计系统做出进一步完善,以期在稳定控制的基础上提升低轨航天器星间通信链路控制的精度。
4 结束语
本文基于GEO设计了一种低轨航天器星间通信链路控制系统,在综合分析了低轨航天器的可行性和传输能力后,探讨传输性能。通过实验验证,本文提出的基于GEO的低轨航天器星间通信链路控制系统优于传统系统,信息传输速率高于传统系统传输速率。