超大型干线集装箱船配载优化
2021-01-06成保辰郭蕴华张青雷牟军敏
成保辰, 郭蕴华, 张青雷, 牟军敏, 胡 义
(1.武汉理工大学 a.船舶动力工程技术交通行业重点实验室;b.能源与动力工程学院;c.航运学院, 武汉 430063;2.上海海事大学 中国(上海)自贸区供应链研究院, 上海 201306)
集装箱自引入到海上运输贸易中以来,因其具有高效率、低成本等优点而掀起了一场全球航运业的革命。根据联合国贸易和发展会议(United Nations Conference on Trade and Development,UNCTAD)[1]发布的《2018年海运报告》,2018年全球集装箱贸易总量达到约1.48亿TEU,年增幅达6.4%,创下了自2011年以来的最大增幅。UNCTAD预测2018—2023年海运集装箱贸易将以每年约6.0%的速度增长,增幅远超其他海运方式。
随着集装箱船智能化和大型化的不断推进,单箱位运营成本大幅下降。因此各大航运公司纷纷订造超大型集装箱船(Ultra-Large Container Ship,ULCS),并引入相关智能管理系统。DYNALINERS[2]的分析数据显示:2018年全球已有451艘ULCS投入运营,另外尚有129艘处于建造状态。ULCS已成为国际干线航线上运营的主要船型。[3]
智能配载是智能船舶系统的重要组成部分,其中集装箱船多港口Bay位优化问题,指已知各港口装载需求数据求解船舶在全航线上的配载方案。该问题已被证明为复杂的NP-hard优化问题。[4]优秀的配载方案应满足船舶航行中强度、浮态、靠港时间和装载率等要求,以保证船舶安全、高效地运营。[5]PACINO等[6]提出考虑压载水的线性模型,用于生成港口的积载计划,采用一种线性化船舶重心计算和静水数据表的方法处理排水量可变情况下的稳性和应力力矩约束;AMBROSINO等[7-11]沿袭WILSON等[12]提出的从战略和战术2个层面解决多港口配载问题的路线,提出解决战略层面配载问题的多港口Bay位优化混合整数规划(Mixed Integer Programming,MIP)模型。该模型考虑到集装箱船的舱口和不规则龙骨,可处理标准集装箱和冷藏箱的配载问题;ZHANG等[13]针对船舶在不同港口移箱费用不同的特点,提出MIP模型,使全航线中靠港总移箱费用最低,并采用改进的遗传算法进行求解。
在已有研究中,并没有将ULCS的强度和精确稳性作为优化约束条件,但该约束对于保障远洋航线ULCS的安全性而言至关重要。本文以文献[9]、文献[10]和文献[14]中的模型为基础做出改进,针对干线集装箱船航程长、装载量大和对船舶强度要求高等特点,同时为避免以货舱为基本单元的模型在求解层数多、装载量大的ULCS时易出现装载率较低等问题,提出以堆垛和货舱为基本单元,兼顾堆垛内倒箱和开舱盖倒箱2种情况,考虑船体精确强度约束并对稳性约束做出改进的模型。该模型同时满足提高装载率和保障近海、远海航行安全的要求。
1 问题描述
ULCS结构示意见图1,已知其结构信息和整条航线上每个港口待装卸集装箱的种类、尺寸和数量以及出发港、目的港等信息,据此制订出整条航线上各港口的战略配载方案。该方案需满足所有集装箱的装载和船舶适航性的要求,同时须使靠港时间最短。

图1 ULCS结构示意
集装箱倒箱是在卸载集装箱时,因先到港箱在后到港箱的下方,故在对其进行卸载时,需先卸载上方的后到港箱,该操作会增加运营成本,应设法消除倒箱。本模型中倒箱可分为同堆垛内倒箱和因开舱盖操作导致的舱盖上倒箱。倒箱数分别为该堆垛内先到港箱上方所有后到港箱数和本货舱舱盖上所有后到港箱数。
船舶在港口的装卸时间取决于速度最慢的岸吊完成作业的时间,故所有岸吊作业量应平均分配,使其同时完成装载作业,提升岸吊利用效率。本文以倒箱数最少和岸吊操作次数之差最少为目标缩短靠港时间。
2 多港口配载问题的数学模型
2.1 数据预处理
根据航线中重大件货物的尺寸,将其长lb、宽wb和高hb除以40英尺集装箱的长lt、宽wt和高ht,并向上取整得到该货物占用40英尺集装箱位的数量HLno,将2HLno设为重大件货的折算TEU数。据此,在相应航段中船舶Bay位舱盖下的货舱内预留出该货物的空间。为防止甲板上堆垛中出现单数个20英尺箱的情况,对相同目的港的2个20英尺箱同时编组进行计算。
为降低船舶航行时的重心,提高船舶的安全性,该模型假设船舶在离港时船底压载舱为满载状态。在确定各港装载信息之后,根据排水量计算式求得p港离港时的排水量Dispp为
(1)
式(1)中Wi,p为船舶在p港第i部分的重量;W空船为空船重量;C为船舶常数。根据Dispp在静水力曲线表中二次插值可得到在p港离港时,船舶正浮状态下的浮心纵向坐标LCBp和每厘米纵倾力矩MCTp。
船舶离港时空船、油水和备品部分的重量与重心位置已确定,故船舶总重心只与集装箱的布置有关。为减少后续求解重心时的计算量,可根据式(2)求得离港前船舶纵向和横向的固定力矩Mbacedim为
(2)
式(2)中:当dim=lo和ho时,Cogi,dim分别为i部分的LCG和TCG。
根据文献[6]中由邦金曲线求解站间浮力的公式求得p港每站间的浮力,记作Dp,sta。
(3)
式(3)中:δw为海水的密度;Δl为站间距;kiWs+bi为对船舶邦金曲线的分段线性拟合。
2.2 模型数据集
P为全航线中所有港口的集合;D为所有港口间航线的集合;Dp为途经p港或p港为始发港的航线集合;Dp-为途经p港,但p港不为始发港的航线集合;H和ST分别为表示船舶货舱和堆垛的集合;BAY为船舶Bay位的集合;G为集装箱重量类别的集合(g=0为空箱、g=1为轻箱、g=2为中等箱、g=3为重箱);S为集装箱尺寸类别的集合(s=1为20英尺集装箱(占1 TEU箱位);s=2为40英尺集装箱(占2 TEU箱位);s=3表示45英尺集装箱(本模型中占2 TEU箱位));T为货物种类类别的集合(t=1为普通箱;t=2为冷藏箱;t=3为重大件货物);Cogh,dim为货舱h的横纵坐标集合(dim=lo为纵向;dim=ho为横向);Yp为p港岸吊的集合;Hpc为p港岸吊c负责的货舱的集合;HBay为船舶Bay位包含的货舱集合;Kh为货舱h中包含的堆垛的集合;Sta为船舶分站的集合;Ksta和Hsta分别为船舶sta站所包含的堆垛和货舱的集合;Dispp为各港口离港时船舶排水量的集合;Dp,sta船舶在p港离港时,各站浮力的集合;Nstation,max和Mstation,max分别为船体各强度控制点剪力和弯矩最大许用值的集合;STAm为弯矩控制点所在站号的集合;perpn和perpm分别为船舶在p港到p+1港间,船体剪力和弯矩的安全阈值所占船体强度最大许用值百分比参数的集合。
2.3 模型参数
np为航线上港口总数;Chh和Chht分别为货舱h舱盖下的货舱可容纳的TEU箱总数和t种类集装箱的TEU箱数;Ckk和Ckkt分别为甲板上堆垛k中可容纳的TEU箱总数和t类集装箱的TEU箱数;Qhobal为在近似无横倾角状态时,左、右舷各部分重量对船体中心线的横向矩的最大差值;Nmix为同一堆垛内可存在的不同目的港的数量;Nod,stg为尺寸为s、种类为t、重量等级为g、始发港为o、目的港为d的自然箱数;Wg为重量等级为g的集装箱重量(对于20英尺集装箱,W0=2.5 t,W1=7 t,W2=14 t,W3=21 t;对于40英尺集装箱,W0=4 t,W1=10 t,W2=20 t,W3=30 t;对于45英尺集装箱,W0=5 t,W1=12 t,W2=24 t,W3=36 t);TRIMmax为船舶离港时最大纵倾限制;opt,s为尺寸s种类t的集装箱每TEU岸吊操作次数,本模型采用双起升机构40英尺集装箱岸桥,可同时吊起2个40英尺集装箱或4个20英尺集装箱,故20英尺集装箱为1/4,40英尺集装箱和45英尺箱为1/2,重大件货物为1/HLno;PWf为各目标函数线性加权的权重(f=1,2);Δl为船舶站间距。
2.4 模型变量
xhodh,stg和xdodk,stg为非负整数变量,表示在货舱h或堆垛k中尺寸为s、种类为t、重量等级为g、出发港为o和目的港为d的自然箱数(xh和xd分别为舱盖下和舱盖上的货舱);yhpdh和ydpdk为布尔型变量,分别为若在p港、货舱h中有目的港为d的集装箱,则yhpdh=1,反之yhpdh=0;若在p港,舱盖上的堆垛k中有目的港为d的集装箱,则ydpdk=1,反之ydpdk=0;rph为非负整数变量,表示在p港、货舱h中发生卸载舱盖下的集装箱和向舱盖下装载集装箱中任意一个行为时,舱盖上堆垛k的自然箱倒箱数;rpk为非负整数变量,表示在p港、堆垛k中,舱盖上堆垛k的自然箱倒箱数;fph和fpk为布尔型变量,分别表示在p港,若货舱h中舱盖下存在集装箱的装载或卸载作业,需要舱盖上的货舱h中的集装箱进行倒箱,则fph=1,反之fph=0;若堆垛k中存在堆垛内倒箱,则fpk=1,反之fpk=0;Xpk为正整数变量,表示船舶在p港时、堆垛k中,集装箱最远的目的港的编号;Lp,sta为实数变量,表示船舶离开p港时,sta站的载荷;Np,station为实数变量,表示船舶离开p港时,station与station+1站间的剪力;LCGp为实数变量,表示船舶离开p港时的纵向重心与艉垂线的距离;Mp,station为实数变量,指船舶各弯矩控制点的弯矩;oppc为非负实数松弛变量,表示在p港,岸吊c的操作次数;Δpce为非负实数松弛变量,表示在p港,任意2台岸吊c和e的操作次数差值的绝对值;Δmax为非负实数松弛变量,表示Δpce的最大值。
2.5 数学规划模型
2.5.1目标函数
(4)
式(4)为该模型的目标函数,通过将倒箱数最少和最大吊机操作次数之差最小的多目标函数,通过线性加权法转化为单目标函数,各目标函数的权重分别为PW1和PW2。
2.5.2约束函数
s∈S;t∈T;g∈G
(5)
式(5)为所有货舱和堆垛中各类集装箱自然箱数之和必须等于整条航线上的货运总量。
p∈P;p≠1;p≠pmax;h∈H
(6)
式(6)为在p港,若货舱h舱盖下有目的港为d的集装箱,且在p-1港,货舱h舱盖上的货舱中有目的地为d的集装箱,变量fph大于0,因其为布尔型变量,有fph=1。
(7)
(8)
式(7)和式(8)为在p港,每个货舱h内集装箱的目的港必须相同;同时,为提高集装箱配载灵活性,使堆垛k内可装载不同目的港的集装箱,同一堆垛内集装箱目的港个数不超过Nmix个。
2xhodh,45tg)≤Chhyhpdh,
p∈P;d∈P;d≠p;h∈H
(9)
2xdodk,45tg)≤Ckk×ydpdk,
p∈P;d∈P;d≠p;k∈ST
(10)
式(9)和式(10)为在p港,每个货舱h(堆垛k)中的TEU数量不超过其容量限制。
2xhodh,45tg)≤Chht×yhpdh,
p∈P;d∈P;d≠p;t∈T;t>1;h∈H
(11)
2xdodk,45tg)≤Ckkt×ydpdk,
p∈P;d∈P;d≠p;t∈T;t>1;k∈ST
(12)
式(11)和式(12)为在p港,货舱h(堆垛k)中种类为t的TEU箱数不能超过t类箱容量限制。
(o,d)∈D;k∈ST
(13)
式(13)为若堆垛k中存在45英尺集装箱,则该堆垛中至少保留2个40英尺集装箱,以满足45英尺集装箱的装配要求。
p∈P;p>1;d∈P;d≠p;d≠p-1;h∈H
(14)
p∈P;h∈H
(15)
式(15)为计算p港因开舱盖导致的倒箱数。
Xpk≥ydpdk×d,p∈P;k∈ST;(p,d)∈Dp
(16)
式(16)为在港口p,将堆垛k中集装箱最远的目的港的值d赋给Xpk,若堆垛k中无集装箱,则将Xpk置0。
(Xpk-Xp-1k)/np-fph≤fpk,p∈P;h∈H;k∈Kh
(17)
式(17)为在港口p,若堆垛k中无集装箱卸载操作且该堆垛所在货舱不存在开舱盖操作,同时堆垛内最远集装箱目的港Xpk变大,则表明堆垛k中有堆垛内倒箱情况,将变量fpk置1。
k∈ST;(o,d)∈D;d=Xpk
(18)
式(18)为计算p港堆垛k的堆垛内倒箱数。
p∈P
(19)
式(19)为计算p港船舶离港时船舶的LCGp。
|Dispp×(LCGp-LCBp)/(100MTCp)|≤TRIMmax,
p∈P
(20)
式(20)为在p港船舶离港时,船舶纵倾绝对值应不大于TRIMmax,以保证船舶为近似平吃水状态。根据邦金曲线可计算得到当船舶纵倾绝对值不大于1 m时,船舶各站排水量与其平吃水状态的相对误差小于1%,由此可假设船舶为平吃水状态。
p∈P
(21)
式(21)为p港船舶离港时,船舱内外左右舷堆装的集装箱箱重对船舶中线面横向力矩应小于约束Qhobal,以减小集装箱载荷对船体的横向扭矩,并保证船舶为近似无横倾角状态。
p∈P;c∈Yp
(22)
式(22)为计算p港各岸吊的操作次数oppc。
|oppc-oppe|≤Δpce,
p∈P;c∈Yp;e∈Yp;c≠e
(23)
式(23)中:Δpce为p港岸吊操作次数的差值。
Δmax≥Δpce,
p∈P;c∈Yp;e∈Yp;c≠e
(24)
式(24)为整条航线中,计算所有岸吊操作次数差值的最大值Δmax。
sta∈STA;p∈P
(25)
式(25)为在p港,船舶离港时,根据船舶每站所受的重力与浮力之差求出该站的载荷Lsta,p。
p∈P;station∈STA
(26)
式(26)为在p港,船舶离港时对每站的载荷Lp,sta求积分得出每站间的剪力Np,station。
p∈P;station∈STAm
(27)
式(27)为在p港,船舶离港时对每站间剪力Np,station求积分得出站间控制点的弯矩Mp,station。
Np,station≤perpn×Nstation,max,
p∈P;station∈STA
(28)
Mp,station≤perpm×Mstation,max
p∈P;station∈STAm
(29)
式(28)和式(29)分别为船舶在p港,离港时船舶各点剪力和弯矩不能超过该点对应的阈值。各点船体强度的阈值根据下一航段距离,通过参数perpn和perpm进行调整。
(o,d)∈D;s∈S;t∈T;g∈G;h∈H;k∈ST
(30)
yhpdh∈{0,1},ydpdk∈{0,1},fpk∈{0,1},
p∈P;h∈H;k∈ST
(31)
式(30)和式(31)为配载方案中不可松弛为实数的变量。
3 计算试验结果
选取装载量为21 014 TEU、40英尺冷藏箱位为1 000个、Bay位数为24个、每个Bay位有4个舱盖的ULCS作为试验船舶。该船Bay位布置和纵向强度约束见图2,结构参数见表1。船舶在离港时为近似正浮状态,即船舶纵倾为平吃水状态且横向无横倾角,同时舱底压载水舱为满载。配载的集装箱货物设定为普通箱、冷藏箱和重大件货物等3种类型,其中普通箱有20英尺集装箱、40英尺集装箱和45英尺集装箱等3种规格,每种规格又划分为4个重量等级。根据干线航线中ULCS长途货物远多于短途货物的特点[2],假定
(32)
据此随机生成11个航线场景。港口数为6的场景3~7中各港口货运量、不同尺寸种类集装箱比例以及所占船舶舱容百分比数据的平均值见表2。第8号和第9号场景见图3,反映港口数为7的航线情况。在整个环线中,集装箱船靠港顺序为
图3 港口数为7的远洋干线航线示意
图2 ULCS的Bay位布置图和纵向强度约束示意

表1 船舶结构参数
表2 场景3~场景7中各港口平均货运数据
F-1→G-1→A→B→C→D→E→F→
G→A+1→B+1→…
(33)
式(33)中:F-1和G-1为上一轮循环中的F港和G港,A+1和B+1为下一轮循环中的A港和B港。将航行距离较远的远洋航段G-1→A、D→E和G→A+1的剪力和弯矩约束百分比perpn和perpm分别设置为90%和80%。为在保证船舶近海航行安全的同时提高求解速度,将近海航段站间剪力和弯矩约束百分比perpn和perpm放宽至95%和90%。各港口可用岸吊数量最大值为10。
模型中舱盖以下的集装箱以货舱H而非堆垛ST为基本单元进行计算,同时舱盖上堆垛内不同目的港数量Nmix值被设置为2,这些策略可在兼顾集装箱配载灵活性的同时提高求解速度,也可有效减少开舱盖操作次数。
将船舶相关参数约束和货运量数据代入该模型,通过计算为增加可行解数量,将岸吊操作次数松弛为正实数。在其他变量不松弛的情况下,松弛的岸吊操作次数仍可作为配载方案优劣的评价标准。[10]该模型在双2.5 GHz CPU、96线程、128 GRAM配置的服务器环境中,使用C++编程并调用CPLEX 12.9求解器求解,求解结果见表3。
表3 不同场景中目标函数的计算结果
由表3可知:所有航线场景都能求解出倒箱数为0且岸吊操作次数差值小于3的配载方案。港口数分别等于5、6、7和8时,平均能在1 016 s、1 451 s、5 533 s和12 067 s内找到最优解。相对于干线船舶数天的航行时间来说,该时间是可接受的。
为验证该模型对特种货物配载的有效性,将重大件货物和冷藏箱的装载比例逐渐提高,计算结果见图4和图5。
重大件货物装载计算试验结果如图4所示。其试验条件为:在港口数分别为5和6时,航线特征、出发—目的港货运量、稳性和强度约束分别与场景1和场景3中各项约束相等。在保持不变的情况下,将重大件货物的运量不断提高。每个场景重复5次计算试验,可得重大件货物折算TEU数与求解时间的对应关系。该试验结果表明:该模型的求解时间随重大件货物运量的增加而缩短,该特性源于数据预处理将特种箱位置固定的启发式规则,缩小求解问题的空间,提高求解速度,验证该模型可高效地解决不同装载场景中重大件货物的配载问题。
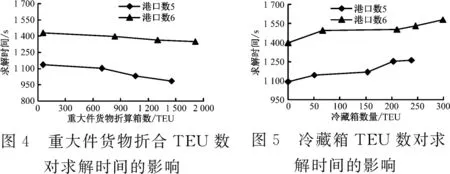
冷藏箱装载计算试验结果如图5所示。该试验在港口数分别为5和6的场景中,使航线特征、出发—目的港货运量、稳性和强度约束分别与场景1和场景3中各项约束相等,并将其固定。逐渐增加各港口40英尺冷藏箱的装卸数量,直至约束上限。重复5次计算试验,可得模型求解时间与冷藏箱数量的对应关系。该试验结果表明:随着冷藏箱数量的增加,求解时间不断增加。在港口数分别为5和6且全航线中冷藏箱满载的情况下,最优解的求解时间,最大值为1 260 s和1 570 s均在可接受范围内,验证该模型能满足不同冷藏箱装载场景的求解需求。
上述各试验结果表明:该配载模型可保证ULCS在近海和远洋航行时的安全,可有效解决ULCS在不同场景中的配载问题。
4 结束语
本文通过对ULCS的结构和航线特点进行分析,提出该船型的多港口Bay位优化问题的模型。
1) 该模型以倒箱数最少,岸吊操作次数差值最小为目标,缩短船舶靠港时装卸货的时间。
2) 提出ULCS的精确剪力弯矩模型,并改进原有稳性模型,提高船舶在不同航区航行时的安全性。
3) 根据航段的距离,动态地调整船舶的结构强度约束,保证各航区的安全的同时,提高求解速度。
4) 提出重大件货物的配载策略,同时,考虑冷藏箱和45英尺集装箱的装载需求,并验证其有效性。
该模型也存在未考虑船舶垂向重心高度约束、未考虑危险品集装箱和超限集装箱货物装载约束等限制条件,仍需不断完善。试验结果表明:该创新多港口配载模型可在解决远洋干线ULCS多港口Bay位优化问题时,有效提升ULCS配载效率,加快集装箱船大数据智能运维平台软件国产化进程。
