公交车车门开启过程分析与优化设计
2021-01-04王永敢王永娟向宇朱蒙
王永敢,王永娟,向宇,朱蒙
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引言
公交车车厢空间有限,在运行高峰期,要求公交车运行过程中能最大限度地开启、关闭车门,以留出最大空间,方便乘客上下车。由于公交车车门系统是刚体结构,其运动过程中必然存在冲击等问题;过高的冲击不仅降低使用寿命,也将威胁乘客的安全,因此公交车车门在设计过程中必须减小冲击。摇臂滑块式车门机构开、关过程中能很好地避免车门附近的人被车门夹到,被广泛用于现代公交车车门系统中。
公交车车门设计中,选取不同的摇臂长度和旋转角度将使得车门的受力及开启限度不同,本文基于此进行车门开启过程分析,通过仿真分析摇臂长度及旋转角度对车门开启限度、门板几何质心加速度(反映车门所受合力的变化)影响规律,并通过优化设计寻找使车门开启过程中受力最小及开启限度最大的摇臂长度及旋转角度。
1 车门开、关工作原理
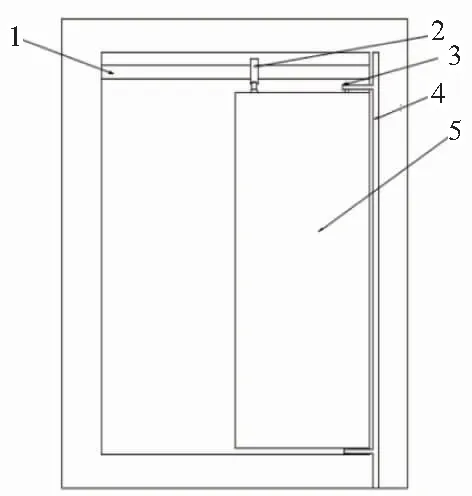
1—导轨;2—滑块;3—摇臂;4—转轴;5—门板。
2 车门开、关过程分析
由于门板与滑块处连接长度相对于摇臂长度或门板连杆宽度较小,将其忽略不计。因此,车门开、关机构可近似简化为摇杆滑块机构[1],机构简图如图2所示。
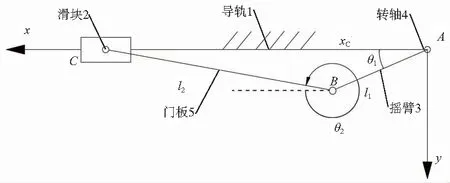
图2 车门开、关机构俯视简图
2.1 位置分析
由图2可得关系式:
(1)
其中:l1为摇臂长度;l2为门板宽度;xc为车门开、关过程中滑块的位移;θ1为摇臂在x方向绕逆时针旋转的夹角;θ2为门板在x方向逆时针旋转的夹角。
将式(1)写成矩阵形式为
(2)
将式(1)的θ2消掉,得滑块运动位移与摇臂长度l1、摇臂旋转角度的θ1的关系式:
(3)
一般公交车车门开启时摇臂的旋转角度在90°~110°范围内,由式(3)定性分析知,当摇臂旋转角度>90°时,随着摇臂长度l1的增大,车门的开、关限度减小。
2.2 加速度分析
将式(2)两端矩阵对时间t求导并整理,得:
(4)
车门转动角速度与滑块速度为
(5)
将式(4)两端矩阵对时间t求导并整理,得:
(6)
其中:α1为摇杆角加速度;α2为车门转动角加速度;ac为滑块加速度。
将式(5)代入式(6)得α2、a2与l1、l2、θ1、θ2的关系式,而且l2随l1的变化而变化,θ2随θ1的变化而变化。
对车门加速度进行运动学求解得到车门质心加速度为
(7)
以上计算只能容易地定性分析出车门开启限度xc随摇臂长度变化的关系,而对于车门加速度随摇臂长度、摇臂旋转角度的变化难以定性分析,因此需结合仿真进行定性分析。
3 车门模型建立及参数化
建立车门机构仿真模型如图3所示。

图3 车门机构仿真模型
该模型假设与简化如下[2]:
1)由于公交车门为左右对称结构,故只对一侧结构建模;
2)将摇臂端点与车门左边线垂直距离的变化等效为摇臂长度的变化;
3)各运动副视为理想运动副,忽略其摩擦;
4)门板质量均匀,门框只起支撑作用,不参与运动。
该模型设计变量如图4所示。
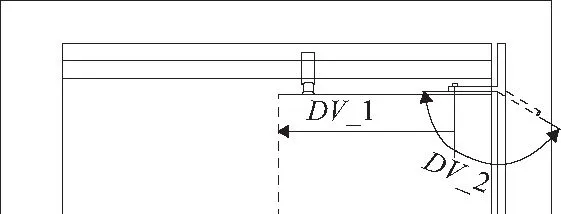
图4 设计变量示意图
为了方便建模,定义摇臂端点与车门左边线垂直距离为设计变量DV_1(反映出摇臂长度的变化,随着DV_1的增加而减小),单位mm;摇臂的旋转角度为设计变量DV_2,单位(°);滑块的运动位移最大值为目标函数X;车门质心加速度最大值为目标函数A;模型为多变量多目标函数约束问题[3]。驱动函数选用正弦函数[4-6],数学模型如下:
4 车门开、关过程特性分析
定义滑块到车门左端边线距离为L随时间而变化;滑块到车门左边线最大距离为Lmax。车门的开启限度体现在Lmax上,设计变量DV_1及DV_2的变化将引起Lmax的变化;仿真时间为2 s,即车门开启1次,再关闭1次。
仿真结果如图5-图9所示(本刊为黑白印刷,如有疑问请咨询作者)。
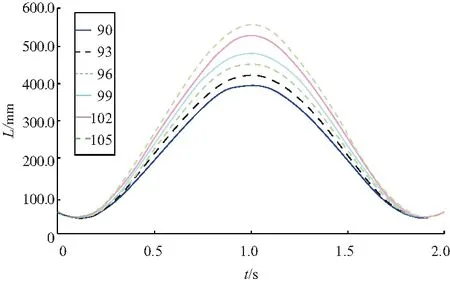
图5 固定DV_1=410 mm,不同DV_2时滑块位移与时间图像
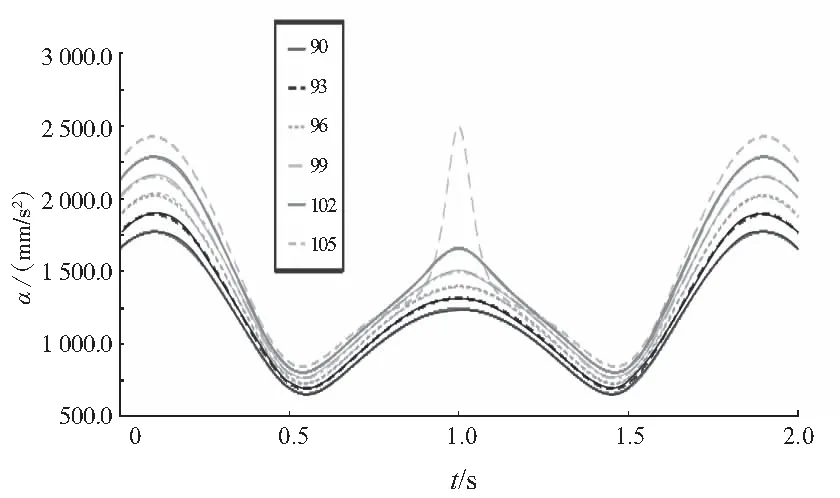
图6 固定DV_1=410 mm,不同DV_2车门几何质心加速度与时间图像
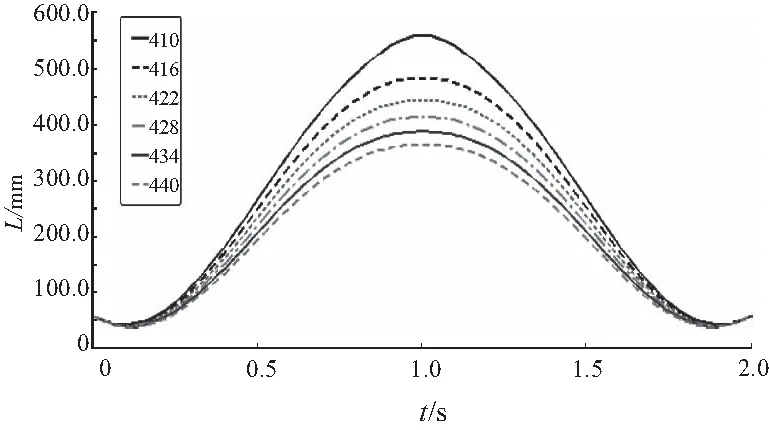
图7 固定DV_2=105°,不同DV_1时滑块位移与时间图像
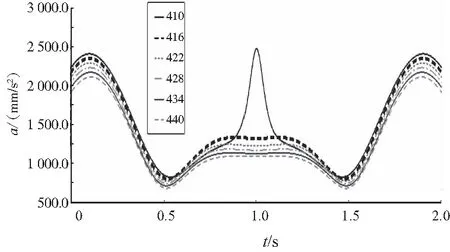
图8 固定DV_2=105°,不同DV_1时车门几何质心加速度与时间图像
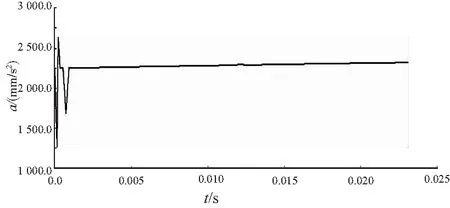
图9 DV_1=410 mm,DV_2=105°时车门质心瞬时加速度
由图5、图7可知,车门开启瞬间,滑块位移减小,约0.2 s后增大,这是由于结构原因导致车门开启瞬间使滑块瞬时左移。由图6、图8、图9可知,车门加速度的峰顶值出现在车门开启和关闭瞬间。此时,车门开启瞬间,加速度很不稳定,反复变化,冲击力最大,严重影响车门连接处零件的疲劳寿命。
固定摇臂长度不变,摇臂旋转角度越大,则车门开启限度也越大,但车门质心加速度和冲击也越大。固定摇臂旋转角度时,摇臂长度越大,则车门开启限度越大,但车门质心加速度和冲击也越大。因此车门开启限度和车门运行平稳性是一对矛盾,想要大的车门开启限度,必然要使车门运行平稳性减小,反之亦然。
当摇臂长度最大,旋转角度最大时,车门有最大的开启限度,但也具有最大的质心加速度,平稳性最不佳。随着摇臂长度的减小,对车门开启限度及运行平稳性的影响显著减小;摇臂旋转角度的减小,对车门开启限度及平稳性的影响也显著减小。车门开启与关闭瞬间的质心加速度最大,且显著大于其他位置的质心加速度,对车门运行平稳性影响最大。因此设法减小车门开启与关闭瞬间的质心加速度,能显著地提高车门运行的平稳性。
5 目标函数优化分析
由以上对车门运动学、动力学分析可知,优化的目标函数是相互矛盾的,要获得一种较好的性能必然牺牲另一种性能,而不能同时达到最优,这就需要在各个最优解间进行协调,以获得较好的整体方案[7-8]。
优化方法常用双响应曲面拟合过程,即一个曲面拟合均值,另一个曲面拟合方差,这是一种循环渐进的过程,各阶段的结果会引导下一步所取方向[9]。设u为响应均值,σ为响应标准差,yq,p为实验点p的q响应,其中p=1,2,3,…,m;q=1,2,3,…,n,可得n次实验的均值点估计和方差估计为[10-11]:
(8)
(9)
利用双响应曲面法对滑块位移与车门质心加速度进行二次响应拟合得到均值响应曲面模型和方差响应曲面模型为[12]:
X=β0+β1x1+β2x2+β3x12+β4x22+β5x1x2
(10)
A=α0+α1x1+α2x2+α3x12+α4x22+α5x1x2
(11)
式中:x1为摇臂长度变量DV_1;x2为摇臂旋转角度变量DV_2;β、γ为待定系数;X为滑块的位移;A为车门质心加速度。
分别选取一定间隔的摇臂长度与旋转角度各6组数据进行RSM优化实验,共进行36次试验,所得数据如表1所示。对表1数据进行二次曲面拟合,所得拟合多项式如式(12)、式(13)。
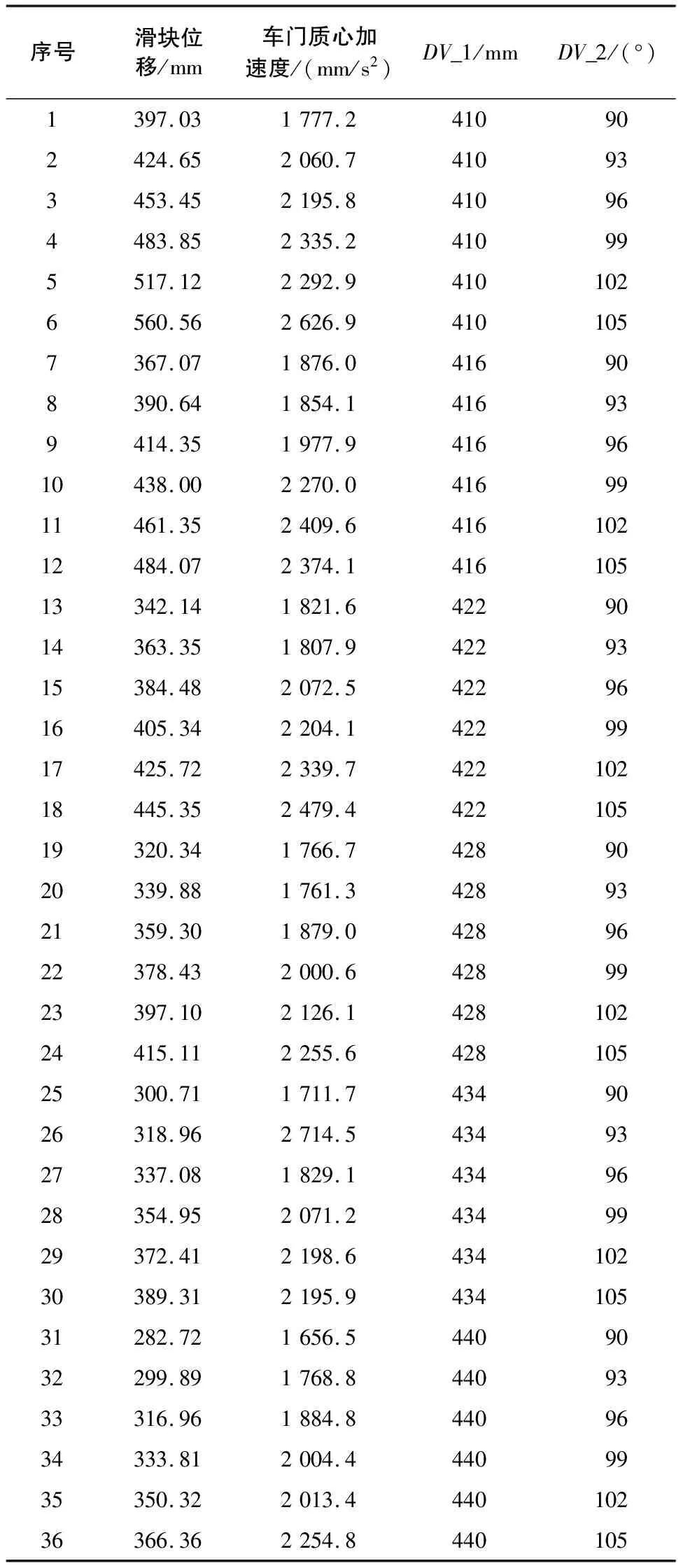
表1 目标实验结果
(12)
(13)
公交车实际运行中需要更多的是车门开启限度最大,以方便乘客上下车,而车门运行平稳性可以通过其他方式提高。取车门开启限度X(DV_1,DV_2)的权重为0.9,平稳性指标A(DV_1,DV_2)的权重为0.1,得出最优结果为DV_1=410 mm,DV_2=105°。由表1计算结果,按下式计算车门开启的不平稳性增加率和开启限度提高率:
式中:δa、δx分别为车门开启的不平稳性增加率和开启限度提高率;amax、amin分别为车门质心最大加速度与最小加速度;xmax、xmin分别为滑块最大位移与最小位移。
为了得到最大的车门开启限度,车门开、关的不平稳性将增加58.6%,而为了得到最大的平稳性,车门开启限度将减小49.6%。所对应的滑块位移和车门几何质心加速度关系如图10所示。
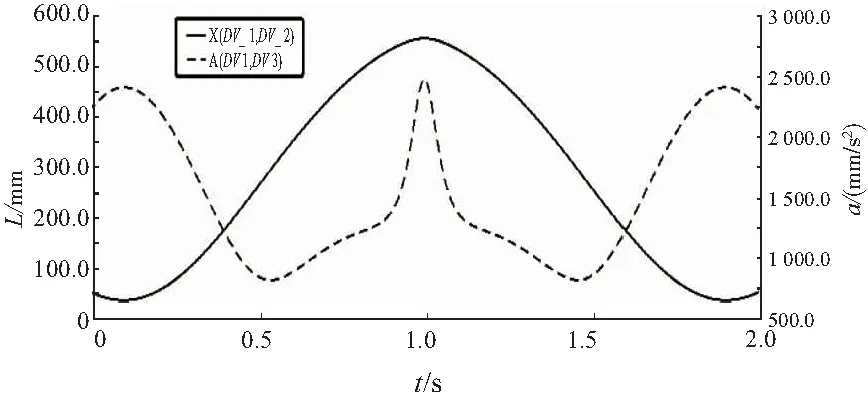
图10 滑块位移、车门质心加速度关系曲线
6 结语
本文对摇臂滑块式公交车车门机构进行车门开启速度、加速度理论计算、仿真分析,并对车门机构目标函数进行二次响应曲面优化,根据实际选取摇臂长度及旋转角度的权重进行目标函数统一,分析得出如下结论和建议。
1)车门开启限度随摇臂长度、旋转角度的增大而增大,车门平稳性随摇臂长度、旋转角度的增加而降低。
2)当DV_1=410 mm,DV_2=105°,为车门开启限度权重0.9,平稳性权重0.1的设计最优值,此时为最大的车门开启限度,车门的不平稳性也最大。
3)对于已经设计好的公交车车门,此时摇臂长度不易改变。对于公交司机,可通过设置两种不同的摇臂选择角度选项。当运行高峰期时,选择摇臂旋转角度为105°,使车门开启限度最大;当非高峰期,选择摇臂旋转角度为90°,使车门运行最平稳。
