高速列车运行调整与运行控制一体化双目标优化模型与算法
2021-01-04龙思慧孟令云王义惠栾晓洁
龙思慧,孟令云*,王义惠,栾晓洁,张 鹏
(1.北京交通大学a.交通运输学院,b.轨道交通控制与安全国家重点实验室,北京100044;2.苏黎世联邦理工学院运输规划与系统研究系,苏黎世8093,瑞士;3.卡斯柯信号有限公司国铁运输指挥系统开发部,上海200071)
0 引 言
高速铁路快速、准点、受天气影响小的特点使其成为旅客中长距离出行的首选交通方式.目前,列车发生延误后主要依赖调度员和司机的人工经验调度和控制列车运行,运行调整与运行控制各自独立优化,难以做到两者均优.因此,灵活高效的列车运行调整与运行控制一体化优化技术在高速铁路运营管理中的需求日益凸显[1].
近年来,运行调整和控制相互结合的趋势愈发明显,两者紧密结合不仅可以得到运行调整和控制均较优的解,还可以提高计划的可实施性,有效减少列车延误时间及运行能耗.将两者结合的方法主要包括两大类,一类是建立两者独立优化模型,通过模型解的反馈将列车运行调整与列车运行控制进行分步优化.Albrecht 等[2]固定列车运行调整策略,模型较多地关注于列车能耗的利用效率.Mazzarello等[3]提出双反馈回路优化结构,将优化的列车运行调整解反馈给列车运行控制模型,并进行循环迭代以提高解的质量.Caimi等[4]在每个决策中均考虑列车路径和速度曲线,列车在有限的备选集中选择相应的列车时刻表和速度曲线.然而,列车运行调整问题一般旨在最小化列车延误时间,运行控制问题则期望列车能耗最小,前者的最优解偏向于列车以较高速度运行,而后者倾向于较低的运行速度,两个优化模型分开建立,就需要对两个模型的目标进行权衡,难以保证运行调整与控制解的全局最优,可能产生不必要的延误或能耗.
另一类是一体化优化列车运行调整与运行控制.曾壹等[5]提出列车节能—晚点恢复模型,在降低列车牵引能耗的同时减少晚点时间.Xu 等[6]以最小化列车总延误为目标,考虑5 个速度等级,建立干扰条件下高速铁路运行图实时调整和列车速度等级选择的一体优化模型.Luan 等[7-8]提出通过优化列车加减速,实现对普速铁路运行图的调整优化,构建运行调整和列控一体化数学模型.但上述研究对列车运行控制优化做了较多简化:Xu等[6]仅对列车速度等级进行选择优化,未考虑列车牵引计算及速度曲线优化;Luan 等[7-8]主要针对普速铁路,离散化处理了列车速度,普速铁路与高速铁路在列车运行速度、列车开行密度、运行控制精度等方面均有所区别,而高速铁路的高速度、高密度、高精度带来模型构建、求解困难.此外,两者解空间耦合困难,以及列车速度约束的非线性也为一体化模型的建立及求解带来较大难度.为进一步提高调整计划的精细度及解的全局优化性,在降低延误的同时减少列车运行能耗,需要对两者一体化建模进行更深入的研究.
本文提出高速列车运行调整与运行控制双目标一体化优化模型,以降低列车总延误时间与运行能耗为目标;模型运用锁闭时间(Blocking Time)理论对列车运行调整与运行控制解空间进行耦合,同时基于列车牵引计算,优化列车速度距离与时间距离曲线.为求解复杂的非线性优化模型,设计分段近似法对非线性约束进行重构,将模型中非线性约束条件部分进行线性化以求问题最优解.
1 问题描述
1.1 列车运行动力学方程
高速列车运行动力学方程是一体优化运行调整与运行控制的基础.高速列车在运行中受到的力包括:牵引力/制动力FTB、基本阻力WB、附加阻力WE等,单位均为N,根据牛顿第二定律,列车运行过程中牵引力、阻力及制动力的关系为

式中:m为列车质量(kg);γ为列车回转系数;a为列车加速度(m/s2).
根据列车受力与牛顿动力学定律,列车从初速度v0增速/减速至速度v(单位为m/s),列车运行加速度、速度、时间变化φtime及位置变化φdistance(单位为m)的关系为

1.2 锁闭时间理论
精细化利用行车资源是指将区间和车站进路以轨道区段为基本行车资源,根据列车运行速度、制动性能、信号系统的清空与开放时间、轨道区段/闭塞分区的长度等因素对不同列车占用不同轨道区段/闭塞分区的时间进行精细化计算,在保证行车安全的基础上,实现行车资源的精细化运用[9-10].
图1为列车锁闭时间示意图,锁闭时间TB包含进路建立时间tsetup、反应时间treaction、接近时间tapproach、运行时间trun、出清时间tclear、进路解锁时间trelease这6个时间要素,可表示为

式中:tsetup、treaction、trelease均为固定参数,tapproach、trun、tclear的计算与列车实时运行状态及轨道区段/闭塞分区的长度有关,这3个时间要素将在优化模型中进行分析.

图1 锁闭时间示意图Fig.1 Blocking time of a block section
2 模型构建
2.1 符号定义
表1和表2分别给出模型输入参数、决策变量的符号与定义.
2.2 数学优化模型
(1)目标函数.

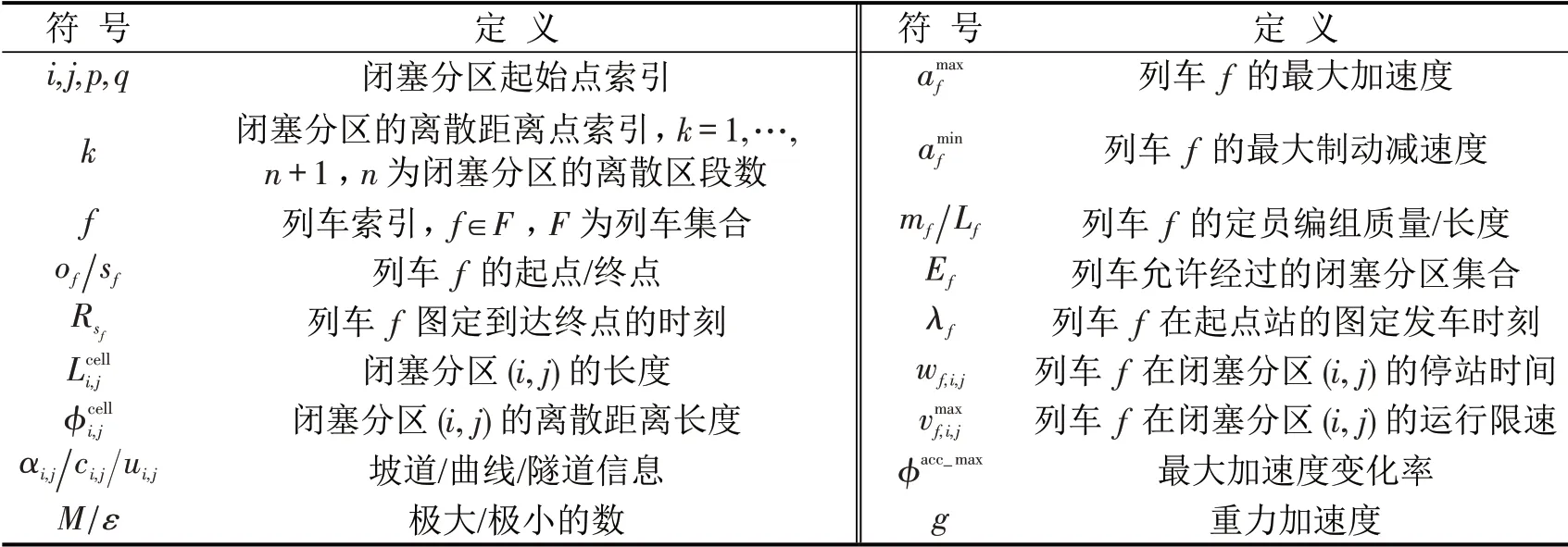
表1 输入参数Table 1 Input parameters
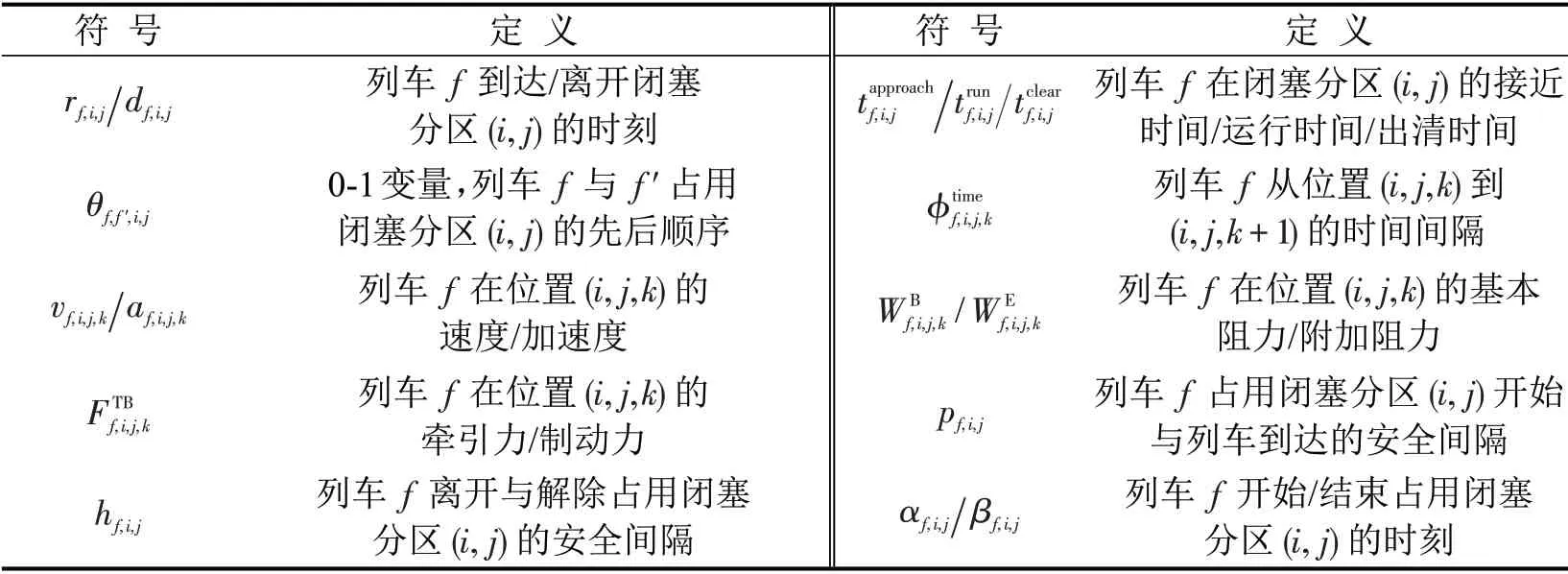
表2 决策变量Table 2 Decision variables
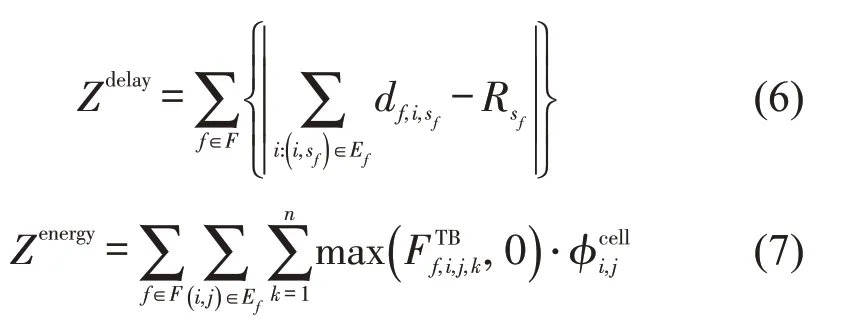
高速列车运行调整与运行控制一体优化需综合考虑宏观层面与微观层面的运行控制目标,式(5)表示最小化列车延误时间Zdelay和列车运行能耗Zenergy,式(6)为所有列车到达终点站的偏离(延误)时间,其中,df,i,sf表示列车f实际到达终点站的时刻;式(7)为所有列车运行能耗,其中能耗由牵引力和位移的乘积求得.
(2)约束条件.

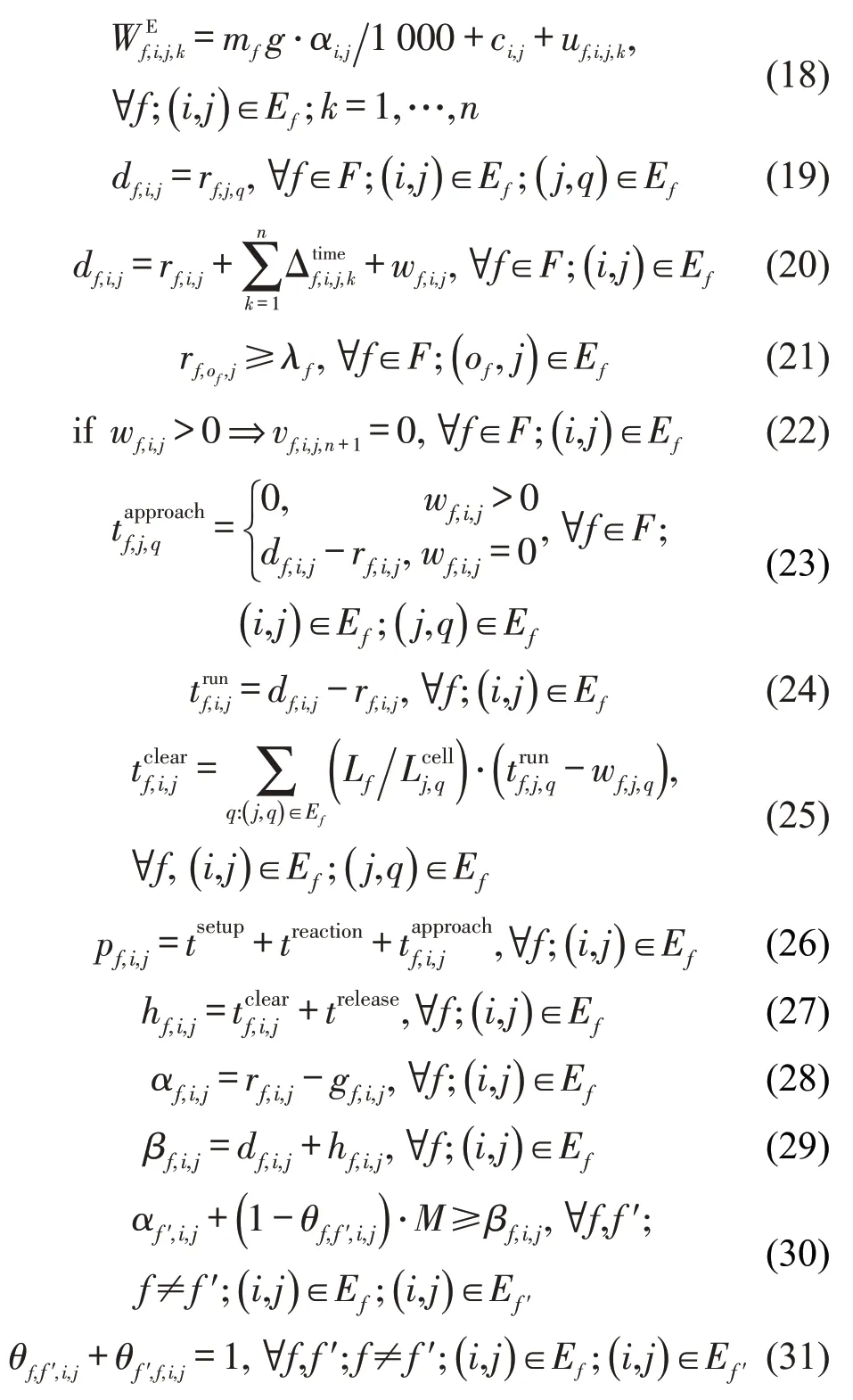
式(8)和式(9)分别表示列车在起点和终点的速度为0,其中,vf,of,j,1和vf,i,sf,n+1分别表示列车f在起点和终点的速度;式(10)表示列车在运行过程中速度不能超过在闭塞区间的运行限速;式(11)为两个相邻闭塞分区速度连续性约束;式(12)表示列车运行加速度、速度,以及位置变化的关系;式(13)采用加速度冲击率对加速度变化进行约束,以保证旅客舒适度;式(14)表示列车运行位置变化、速度,以及时间变化的关系;式(15)为列车加速度的上下限约束;式(16)~式(18)分别表示列车牵引力/制动力、基本阻力、附加阻力的计算;式(19)为列车在相邻闭塞区间运行的时间连续性约束;式(20)为列车在每个闭塞分区的到发时间约束;式(21)为列车从起点站出发时间约束;式(22)表示若列车在闭塞分区(i,j)停站,列车在该闭塞分区结束点的速度为0;式(23)~式(25)分别为轨道区段锁闭时间中接近时间、运行时间、出清时间3个时间要素的计算;式(26)为列车占用闭塞分区开始与列车到达的安全间隔;式(27)为列车离开闭塞分区与解除占用闭塞分区的安全间隔;式(28)和式(29)分别表示列车开始占用、解除占用闭塞分区的时刻;式(30)和式(31)表示相邻列车运行顺序及占用闭塞分区的先后约束.
3 求解算法
模型中二次项的存在使式(12)和式(17)成为非线性约束,实数乘以实数项⋅使式(14)也为非线性.为将优化模型中非线性约束条件线性化,设计分段近似方法以重构非线性约束项.
(1)对二次项进行线性化.
线性化模型中二次项,引入变量yf,i,j,k=,引入逻辑变量δx,f,i,j,k表示曲线分段线段在X-轴所占的比例,m表示对曲线进行分段的数量,x为子线段的索引,具体方法为

最后,引入0-1 变量ηx,f,i,j,k表示条件式δx,f,i,j,k>0 ↔ηx,f,i,j,k=1,其中,ηx,f,i,j,k和δx,f,i,j,k应满足式(34)~式(38)的约束.

(2)对实数乘以实数项进行线性化.
Step 1 将式(14)表示为

Step 2 引入0-1变量∂1,f,i,j,k和∂2,f,i,j,k,使其满足

Step 3 运用二次项线性化方法,如式(32)~式(38),将所含二次项进行线性化.
4 模拟计算与结果分析
以一段长度为55 330 m的高速铁路线路作为算例,线路曲线及坡度信息如图2所示.算例对8列列车进行调整,8 列列车的初始延误时间分别为1 920,1 980,2 100,3 060,2 220,3 000,3 480,2 400 s.列车1、2、5、8 由动车组CRH5 担当,列车3、4、6、7 由动车组CRH380 担当,两种动车组的参数如表3所示,动车组最大加速度冲击率均为0.5 m/s3.本文取n=3 以保证模型求解速度与解的精度.本文在处理器为Intel(R)Core(TM)i7-8550U CPU@1.80 GHz 2.00 GHz,内存为8.00 GB的笔记本电脑上使用Cplex 软件编程求解混合整数规划模型,所有最优解均能在120 s内求得.
使用线性加权及epsilon-约束方法求解双目标模型,两种方法获取帕累托解共20个,帕累托解集如图3所示.所得帕累托解集可以为调度员提供一定的决策辅助支持:若调度员趋向于较少延误时间,则倾向于选择帕累托解1~3 之间的最优解;若调度员倾向于节能运行,则倾向于选择帕累托解3~2之间的最优解.

图2 线路曲线及坡道信息Fig.2 Grade profile and curve radius of line

表3 动车组参数Table 3 Parameters of EMUs
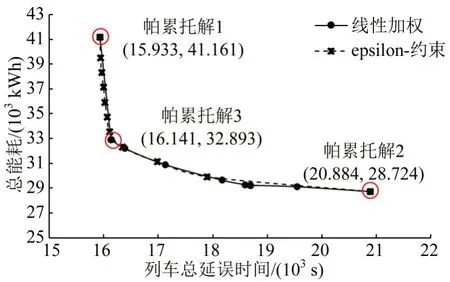
图3 帕累托曲线Fig.3 Pareto curve
图4和图5分别对比了不同帕累托解下的列车速度—距离曲线,列车时间—距离曲线.相对于帕累托解1,帕累托解3 在节能方面取得了较好的效果,在增加延误时间1.3%的前提下,节约能耗20%.从图4可以看出,帕累托解1的列车运行速度整体大于帕累托解3,故解1 的列车延误时间小于解3,但解1的能耗较大.图5中:解1和解3对于某些列车基本是重合的,比如列车1和列车5,这与图4速度—距离曲线的变化趋势相一致;对于其他列车,解3的时间—距离曲线及相应的锁闭时间块位于解1的右边,这是因为解3的列车延误时间大于解1.由于初始延误较大,所有列车均需要赶点.从图5可以看出,列车运行顺序发生了改变,具体来说,列车5与列车4发车顺序发生了改变,列车8在列车6和列车7之前发车,这主要是列车初始延误的大小不一导致的.

图4 列车速度距离曲线(帕累托解1 和3)Fig.4 Train speed distance curve(Pareto solutions 1 and 3)

图5 基于轨道区段锁闭时间的列车时间距离曲线Fig.5 Train time distance curve based on blocking time(Pareto solutions 1 and 3)
对比本文双目标运行调整和运行控制一体优化方法与单目标优化方法,验证本文所提方法的优化性.选取帕累托曲线的两个极值帕累托解与单一考虑最小化总延误时间和最小化总能耗的单目标优化结果进行对比,如表4所示.

表4 双目标一体优化方法与单目标优化方法对比Table 4 Comparison of bi-objective integrated and single-objective optimization methods
由表4可知,在总延误时间一样的情况下(15 933s),双目标一体优化方法较单目标方法减少2.46%的列车运行总能耗;在总能耗一样的情况下(28 724 kWh),相比于单目标优化方法,双目标优化方法减少7.33%的总延误时间.由此可见,运用本文双目标一体优化方法,可以在降低延误时间的同时降低列车运行能耗.
5 结 论
本文构建列车运行调整与运行控制双目标一体优化模型,设计分段近似法将模型中的非线性约束转化为线性约束以便求解.主要得到以下结论:通过运行调整与运行控制一体优化后,总延误时间降低7.33%,总能耗降低2.46%,该方法合理有效.本文有效提升高速铁路在扰动下快速恢复正常运行秩序的能力,并为驾驶员节能驾驶提供了参考.本文路网规模相对较小,下一步研究快速求解算法,以适应更大规模的路网.
