基于飞思卡尔智能车控制系统的设计
2020-12-30马岩,裴林
马 岩,裴 林
(吉林化工学院,吉林吉林,132000)
1 引言
在21世纪智能化的发展或将成为未来的一种大趋势,近年来,它提高了技术机构的速度和微型计算机的生产效率,在集成智能控制的条件下,传感器系统是集成智能的,集成智能的机电产品能够模仿人类的智能,具有一定的判断力和智能能力。从技术上讲,它取代了人脑的一部分。汽车的发展距今也有100多年了,从上个世纪80年代开始直到今天,在智能控制方面的应用是越来越广泛,社会发展的越来越快,汽车的智能化也越来越受人们的青睐。所谓智能就是用一些现代控制方法实现无人驾驶或者其它的动作。
智能车辆(Intelligent Vehicle, 简称IV),又称轮式移动机器人,也被人们称为无人驾驶汽车。它是可以自主决定的一种机器人,也是一个自动驾驶、自动决策、自动感知于一身的高级系统。除了一些特殊用途,还被一些西方国家的重点关注。很多的西方国家早在几个世纪以前就已经开始研究智能汽车而且也把他们当成重点来研究,例如“智能车辆系统” (Intelligent Vehicle Highway Systems,简称 IVHS)、“智能运输系统”(Intelligent Transportation Systems,简称 ITS)。
在智能系统开发中,会彻底的改变原有汽车的一些基本的技术。随着科学发展的速度,特别是在计算机、信息和现代科学的研究,所以目前的智能车系统终于取得了一定的成就。在轿车和重型汽车上主要应用于碰撞预警系统、防撞及辅助驾驶系统、智能速度适应、自动操作等主要智能车辆技术,此技术的应用在军事上更为重要。
2 硬件设计
智能小车的设计分为五个模块:单片机最小系统、红外导航、胡须导航、驱动电源模块、电机驱动模块。
(1)驱动电源模块
电源模块这里采用LM7805、5V电压调节器。调压器工作的前提条件,是锂电池放出7.5V电压。为了简化电路,方便装配,采用控制芯片LM7805输出5V电压,如图1所示。

图1 驱动电源接线图
LM78系列稳压调节电路在外面的一些器件中归类于电压较低的稳定器,防止控制器过热,运行可靠、方便、经济。LM78系列集成稳定器数值显示后的输出电压。三种易用固定调节器的设计。
(2)伺服电机模块
一种将大脑运动指令转换成肌肉功能相应部分的伺服机器人。伺服电机可以进行速度和位置控制,而其他电机都控制不了速度,都以一个相同的速度转动,电机的转速就是由这个脉冲信号来决定的,电机转速如图2、图3、图4所示。

图2 电动机转速为零

图3 电机顺时针旋转
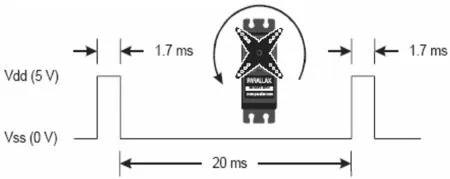
图4 电机逆时针旋转
(3)胡须导航模块
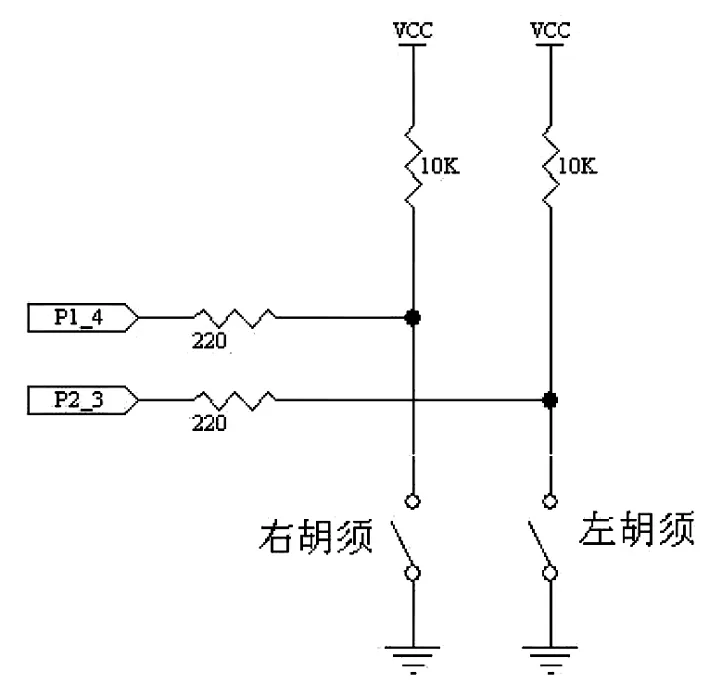
图5 胡须电路原理图
现在的很多机器上都使用不同的触觉开关。例如,机器人配备几根触觉开关,如果触觉开关知道前面有物体挡住,就发送信号来进行一系列的动作。比如测量生产线的产品数量,工业加工订购物品等。在这个设计中,智能机器配备了一个叫做"小胡子"的战术开关,如图5所示。触觉开关由智能机器程序控制,当遇到障碍时,它会决定如何采取行动。最后的结果是智能自动驾驶。
(4)红外导航模块
许多智能汽车使用雷达或声纳探测物体而不接触它们,而红外反射检测可以检测出物体是否在前方,以及其对导航的影响。
当智能车发生故障时,红灯将返回被检测到的物体并发送信号。红外接收器/探测器有内置的光学滤光片,但除红外980nm几乎是不透明的。还有一个电子滤波器,它能够检测过滤大概38.5khz电磁波。探测器每秒仅探测38500次,以防止太阳和内部光线等普通光源的红外干扰,电子滤波器的频率范围为38.5khz,红外探头容易把他忽略。
红外设备搭建的电路图,如图6所示。P1.2为左侧的探测器,P3.5是右侧的探测器。如果P1-3(P3-6)安装在较低的水平,电路将再次断开,红外LED将停止工作。

图6 左侧和右侧探测器原理图
(5)单片机最小系统设计
该设计是为最小的AT89S52系统设计的,作为一个通用的管理系统,他独立负责各个部位的信息的采集,以及对数据的处理。
AT89S52有功能强大的CMOS8微控制器,可编程8KB系统。完全符合80C51工业产品指令和结论。
AT89S52分别支持两种不同的模式,一个叫节电模式,另一个叫空闲模式。在空闲模式,CPU停下所有工作,串口、计数器都停止一切的工作。断电保护过程中,来自RAM的数据都被保存下来,振荡器也随之被冻结。单片机中的动作都停掉,到下一个硬件复位或者中断的产生再继续,最小系统电路原理图如图7所示。
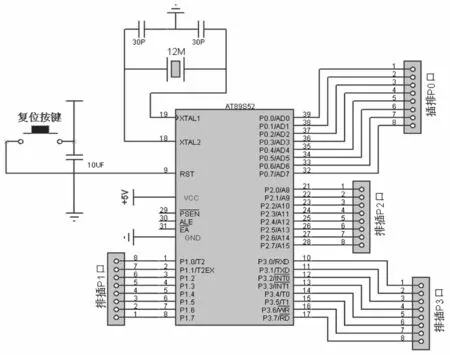
图7 AT89S52最小系统电路原理图
3 软件设计
本设计采用AT89S52单片机,通过软件控制,实现智能车辆的红外和胡须避障,使智能车能够能自动驾驶,避免道路事故,软件设计流程图如8所示。

图8 智能小车“日”字流程
上述流程图主要完成让小车先静止3秒,之后前进3秒,进行左转90°,在继续前进行驶3秒钟,往右90°,往前3秒,往左90°,往前3秒,再往后3秒,最后一步原地右转90°,最后智能车能自己走“日”字轨迹。
4 结论
本次设计所研究的智能车在很多方面都可以作为未来智能机器发展的原型。在车体上加一根杆子,改装成运煤车,在车体上加一个摄像头,使其成为探险车等。同时随着中国航天事业的发展,太空探索、昆虫采集、气候温度探测将成为未来的课题,此次设计的小车实现的主要功能就是避障和导航,相信它可以成为星球探测车的原型。未来,智能机器将以巨大的实用价值和巨大的应用潜力改变我们的生活。
