机载平台红外探测设备减振技术
2020-12-30叶宗民
叶宗民,李 卓
机载平台红外探测设备减振技术
叶宗民,李 卓
(91404部队93分队,河北 秦皇岛 066001)
红外成像测量设备装载在飞机平台上测量地面目标,首先要解决的问题就是平台抖动及环境变化对设备稳定跟踪和成像清晰度的影响。本文针对机载平台抖动对设备跟踪测量的影响,采用被动隔离加主动陀螺稳定控制的技术,通过被动减振器隔离高频扰动,框架伺服系统抑制低频扰动,确保设备稳定跟踪、清晰成像。针对地面与空中环境温度变化对红外光学系统的影响,在光学镜头的设计中采用无热化补偿措施和调焦量补偿控制,确保设备清晰成像。通过仿真计算和外场测量证明,本文研究的减振措施合理有效,采用该措施研制的设备跟踪稳定、成像清晰,能够满足不同平台的挂飞测量任务。
红外探测;机载;减振;稳定跟踪
0 引言
随着目标识别跟踪技术的发展,目标与环境红外特性研究、红外成像制导和红外隐身设计等领域对外场红外特性测量都提出了更高的要求,目标红外辐射特性的测量可为目标的探测、定位、识别、跟踪等研究提供多方面的数据,为系统的仿真提供目标的物理特征及数学模型,为隐身效果评估和隐身结构设计提供量化的特征[1]。而测量最重要的是需要一套满足各种测量平台的系统稳定性高、成像清晰、测量精度高的红外特性测量设备,尤其是在空中对地面目标进行动态测量[2]。目前,国内的机载吊舱主要是用于环境监测和图像录取,针对无人平台的红外目标特性测量的吊舱还没有,主要是通过在有人机上加装热像仪或光谱仪进行测量。本文主要研究红外成像测量设备加装无人平台进行外场测量需要解决的振动隔离和清晰成像问题,以便实现对海面目标实现稳定跟踪测量。
1 设备结构及安装减振设计
与陆基或车载测量系统相比,由于机载平台在飞行过程中受气流和自身运动影响,会对安装在其上的测量吊舱产生扰动,使得测量单元接收到的目标辐射能量发生分散,降低目标红外特性跟踪测量的精度。因此要求测量吊舱能够隔离载体运动,保证测量单元的视轴相对惯性空间稳定,从而实现机载目标红外特性高精度跟踪测量。
为了保持载机气动外形,减少对载机机动性的干扰,测量吊舱外形设计成球形,选取导热性、导电性及电磁屏蔽性能好且具有较高的比刚度、比强度和良好的消振性能材料,在满足刚度、强度及稳定性的前提下,通过采用中空的蜂巢结构或加强肋等优化设计,去除掉不必要的多余重量,选用质量轻、微型化的外购接插件、元器件等,达到轻型化、小型化的目的。机载设备结构安装接口上均设置减振器,测量吊舱与升降机构通过减振器相连,隔离载机起飞和降落时对设备产生的冲击,保护机载设备内部的光学和电子器件,电路板采用加固框加固,增加抗冲击和振动的能力[3]。
为确保测量吊舱能够承受载机起降过程中的冲击与振动,通过减振器刚度阻尼及承载力计算分析选择合理的减振器,并结合测量吊舱的质量重心情况设计合理的安装布局,以实现对振动的有效抑制。测量吊舱与升降机构通过减振器相连,安装示意图如图1所示。

图1 减振器安装示意图
吊舱采用如图2所示的二级减振方案。第一级为外框架减振器,外减振器安装在吊舱与升降机构连接的基座上,光电吊舱整体座在4个均匀分布的外减振器上,实现对光电吊舱整体隔振。外减振器主要隔离向振动,、向自由度被限制,绕、、向的旋转运动也同时被限制。第二级是内框架减振器,为金属橡胶无角位移减振器,8个参数完全相同的内减振器相对于光学舱的质心对称布置,保证弹性系统的弹心与负载的重心重合,从而实现减振系统的完全解耦。

图2 吊舱二级减振原理图
内减振器由金属构件与橡胶材料组合而成,通过结构设计,减振器不能绕、、向旋转和向移动,只能沿、向平动,结构如图3所示。

图3 金属橡胶内减振器结构图
2 吊舱隔振稳定控制技术
载机飞行过程中,由于气流影响使得机身产生扰动,会影响到测量单元的成像清晰度以及吊舱的跟踪精度,这就需要平台能够隔离载体运动,保证测量单元视轴相对惯性空间稳定。为此,稳定跟踪平台采用双轴两框架结构,框架上安装速率陀螺,感应载机扰动,产生与干扰力矩成正比的电压信号用于控制轴系稳定电机,施加与干扰力矩大小相等方向相反的力矩以消除机身扰动的影响。
稳定跟踪单元由方位机构、俯仰机构及吊舱舱体结构件等部分组成,其中方位机构包括方位轴系、方位座及其U型架、方位力矩电机、方位码盘和光电一体化滑环等部件;俯仰机构包括俯仰轴系、俯仰包、俯仰力矩电机、限位机构、方位码盘、光纤陀螺、电源模块等部件。稳定跟踪平台的原理框图如图4所示。
方位框架的回转轴上安装导电滑环、并用高精度光电编码器作为测角元件,由大力矩电机直接驱动,该轴系垂直布置支承方位轴系的所有部件,轴系两端分别安装了轴系的支承轴承、驱动电机和测角元件。方位轴系上端通过方位基座与上盖之间的O型圈实现密封,下端通过方位基座上的挡水裙实现防水。俯仰包采用整体密封性设计。其中轴端采用骨架动密封,框架与各端盖压合处采用O型密封圈密封。

图4 稳定跟踪平台原理框图
稳定跟踪平台方位俯仰均采用力矩电机直接驱动方式,控制结构和控制算法设计方法基本相同,且相互之间相对独立,均包含电流回路、速度回路和位置回路3个部分。对于速度稳定系统,采用了以编码器进行数字测速形成局部速度反馈内环,而以陀螺作为空间测速元件组成外环的双环结构,内环由于包围了摩擦力矩扰动,主要用于消除摩擦力矩的影响,外环主要用于稳定。
载机飞行过程中受气流干扰产生扰动,自身发动机的工作也会产生扰动,根据扰动频率的特点,可分为高频扰动部分(>20Hz)和低频扰动部分(<20Hz)。针对不同频率的扰动需要采取不同的抑制措施:通过框架伺服系统抑制低频部分扰动,而高频扰动通过被动减振器实现隔离。因此解决机载吊舱稳定的有效途径是采用被动隔离加主动陀螺稳定控制的技术,如图5所示。
被动隔振措施在本文第一部分已经阐述,这里不再详述,框架直驱控制系统的高精度稳定控制包括以下解决途径:①通过高精度快响应的伺服控制方法,采取干扰力矩的在线辨识和补偿技术,解决非线性摩擦、风载荷和飞行平台机动等产生的干扰力矩。②针对两轴陀螺稳定系统的大仰角非线性问题,采取补偿控制方法,实现俯仰角全范围的高精度稳定控制。③速率稳定系统的核心组成是低漂移、高宽带的角速率陀螺,通过陀螺实时滤波技术提高角速率陀螺的动态精度,以达到提高控制增益,抑制飞行平台姿态扰动提高稳定精度的目的。

图5 吊舱惯性稳定控制示意图
3 光学系统适应性设计
为满足测量吊舱体积小、重量轻的要求,双视场光学镜头设计采取沿轴平行移动变倍组来进行视场的切换,并尽量减少移动透镜的数量[4]。通过优化,在改变视场过程中,移动透镜的数量仅为一片。轴向移动式双视场光学镜头利用系统中一个镜片组的移动来改变系统焦距,由前固定组、变倍组和后固定组组成,其中前固定组为正透镜,变倍组为负透镜,后固定组为正透镜,通过改变变倍组的轴向位置,从而改变整个系统的焦距,并保证变焦时像面位置不变。
3.1 主动无热化设计
由于空中与地面之间的环境差异较大,特别是温度,随高度上升会迅速下降,温度变化会导致红外镜头的材料折射率、透镜厚度、透镜曲率半径和镜筒尺寸发生变化,若不采取补偿措施红外光学系统的成像性能将急剧下降。为了保证光学系统的性能,必须采取无热化补偿措施。对于两档变焦光学系统,由于不同焦距下所需要的调焦量不同,所以采用双金属片或不同镜片材料组合的被动式无热化难以实现[5]。本系统将采取主动无热化补偿措施,具体措施是在镜头内安装温度传感器,根据环境温度移动调焦镜片,实现调焦量的补偿,调焦机构采用凸轮传动机构,由微电机带动凸轮做旋转运动,通过凸轮上的两条凸轮槽,带动变焦镜片做前后运动,实现变焦功能。不同环境温度下通过移动调焦镜片,实现调焦量的补偿,确保图像在不同温度条件下始终清晰[6]。
为简化系统结构,中波镜头设计采取沿轴平行移动变倍组来进行视场的切换,并尽量减少移动透镜的数量,通过优化,在改变视场过程中,移动透镜的数量为一片。系统由9片透镜组成,材料为硅、锗、硫化锌和氟化镁4种常用红外光学材料。变焦和聚焦功能由一片锗透镜沿光轴前后移动实现,系统光路如图6所示。
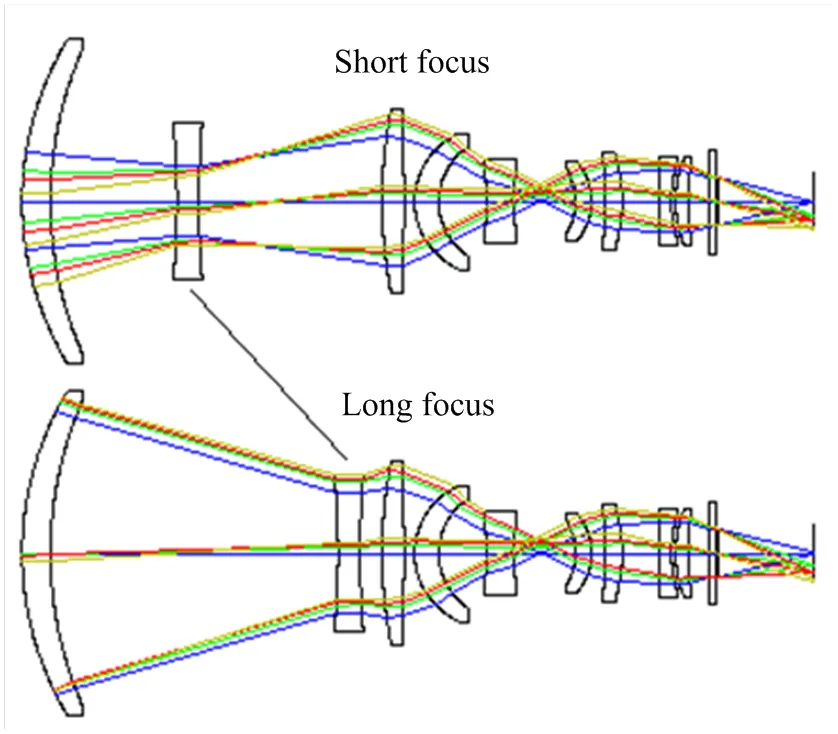
图6 中波红外光学系统光路图
长波红外光学系统的结构形式与中波类似,系统由9片透镜组成,材料为锗和硫化锌两种常用红外光学材料。变焦和聚焦功能由一片锗透镜沿光轴前后移动实现,系统光路如图7所示。
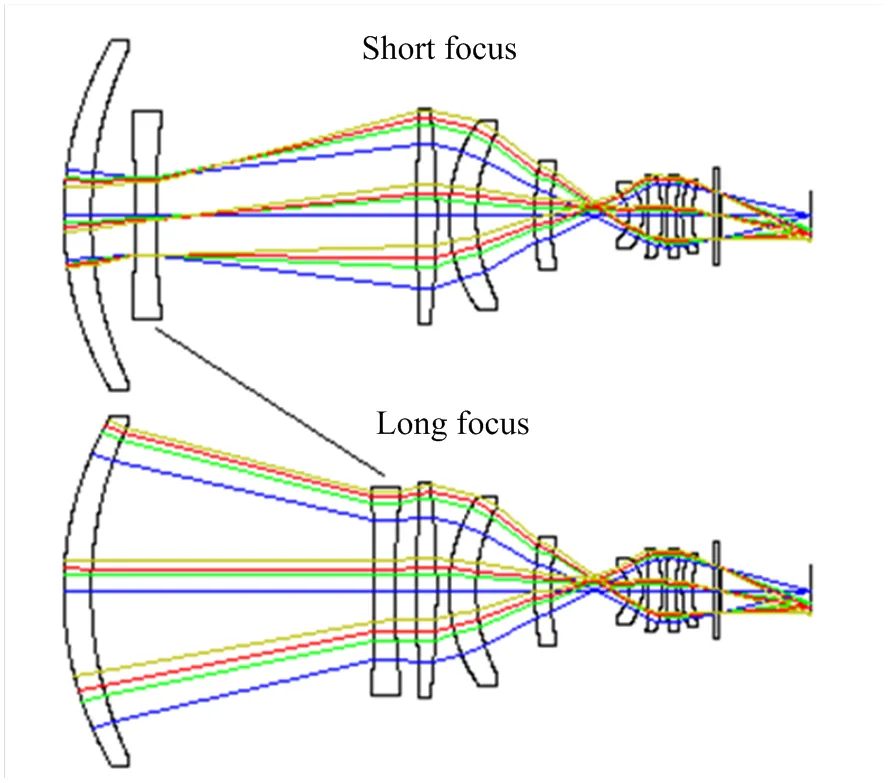
图7 长波红外光学系统光路图
3.2 减振设计
作为机载测量分系统主要搭载平台的载机一般采用弹射起飞和伞降方式,起飞降落时会受到较大的冲击和振动,除测量吊舱为光学系统提供的减振措施外,光学系统还采用了以下设计措施:在压圈和镜片之间增加橡胶O型圈,避免了金属压圈和光学镜片的直接硬接触,以防止机载振动条件下镜片破裂;镜片与镜筒之间留有1mm左右的大间隙,待镜片装配完成后,用硅胶填充该间隙,以提高镜片径向方向的抗振性能,如图8所示。

图8 光学镜片减振措施示意图
3.3 像质分析
短焦端在系统特征频率33mm/lp处,中波光学系统各视场调制传递函数均大于0.4,长波光学系统各视场调制传递函数均接近衍射极限,如图9所示。
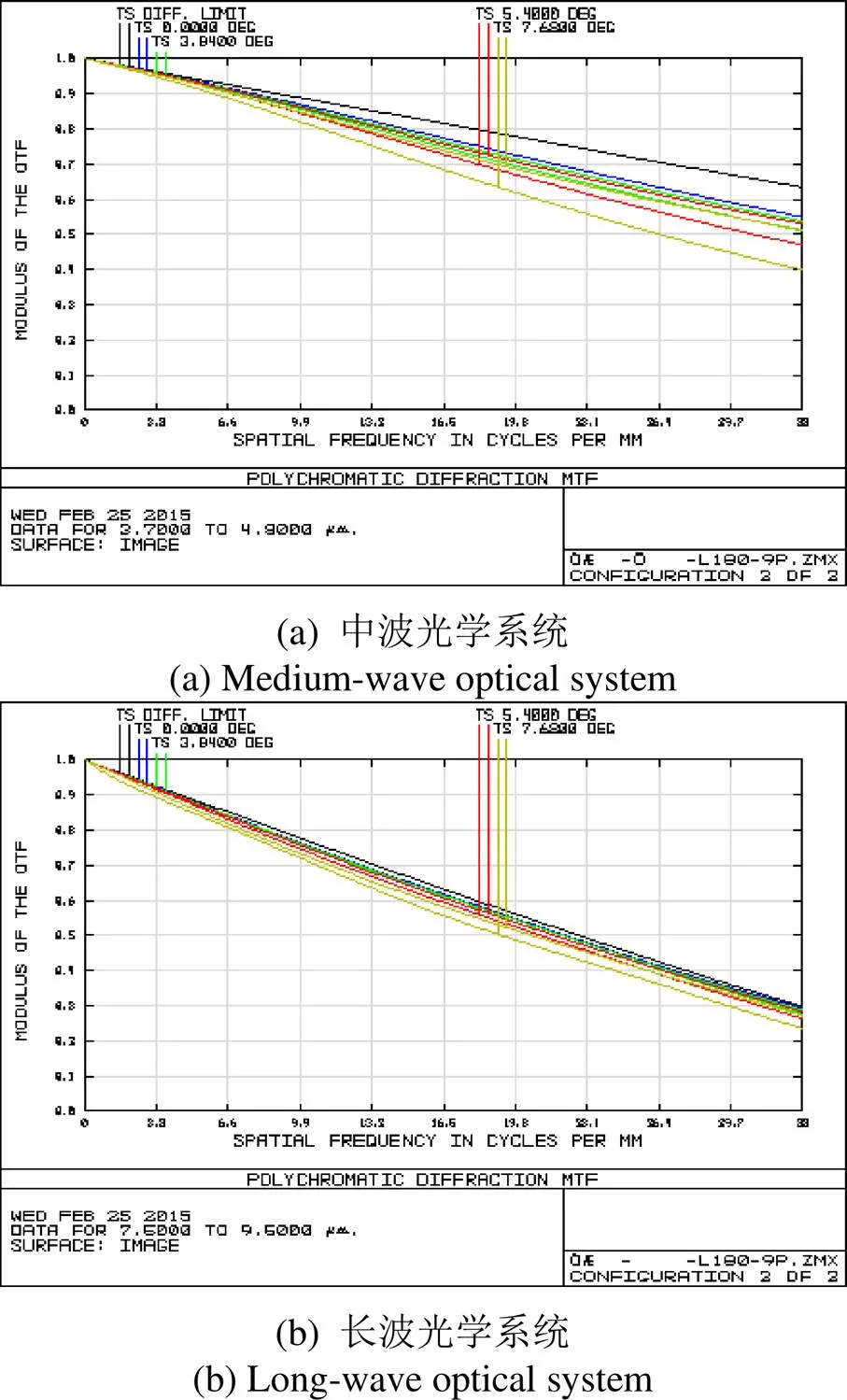
图9 红外光学系统短焦端调制传递函数曲线
中波光学系统短焦端成像最大畸变为0.78%,长波光学系统短焦端成像最大畸变为-1.1%,如图10所示。
长焦端在系统特征频率33mm/lp处,中波光学系统边缘视场子午方向调制传递函数为0.38,其余各视场调制传递函数均大于0.45,长波光学系统各视场调制传递函数均接近衍射极限,如图11所示。
中波光学系统长焦端成像最大畸变为1.2%,长波光学系统长焦端成像最大畸变为1%,如图12所示。
光学系统在室内温箱设计-10℃和外场20℃条件下成像效果[7]如图13所示。
4 系统减振效果验证
4.1 冲击、振动试验验证
系统按照GJB150A-2009《设备环境试验方法》规定要求,开展了冲击、振动试验,验证设备在冲击、振动环境下的工作适应性[8],测试情况如表1所示。
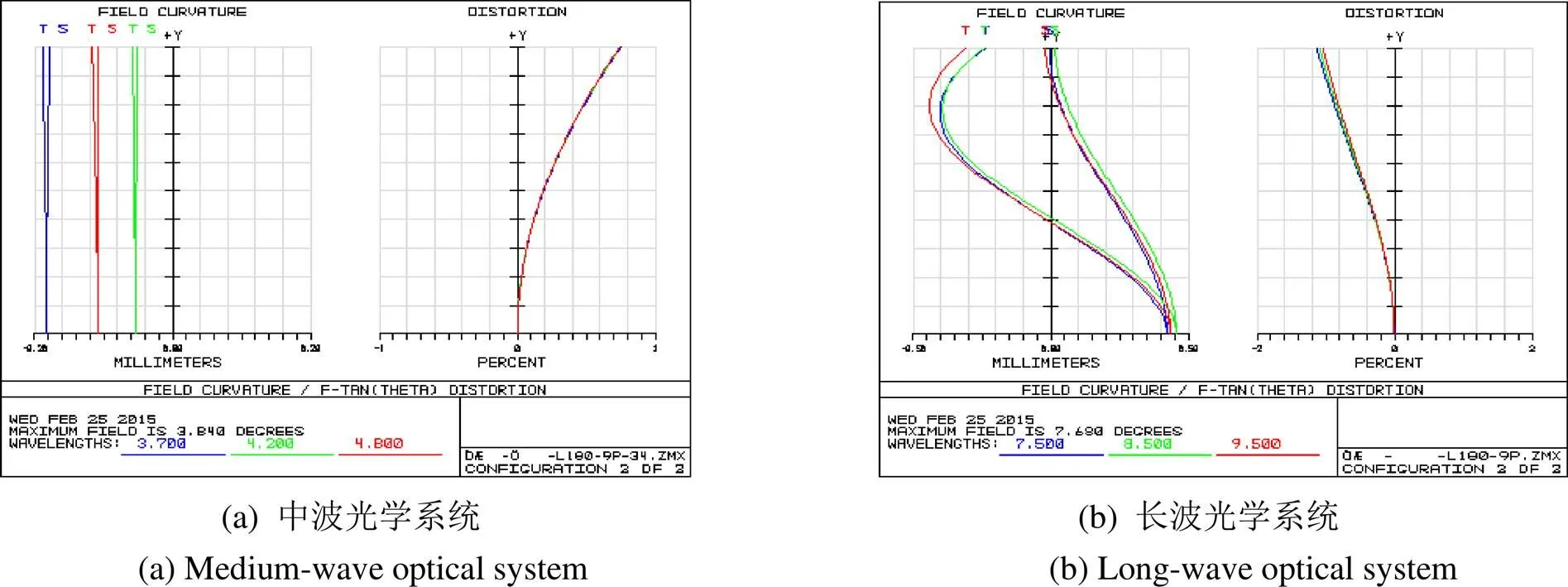
图10 红外光学系统短焦端场曲和畸变曲线
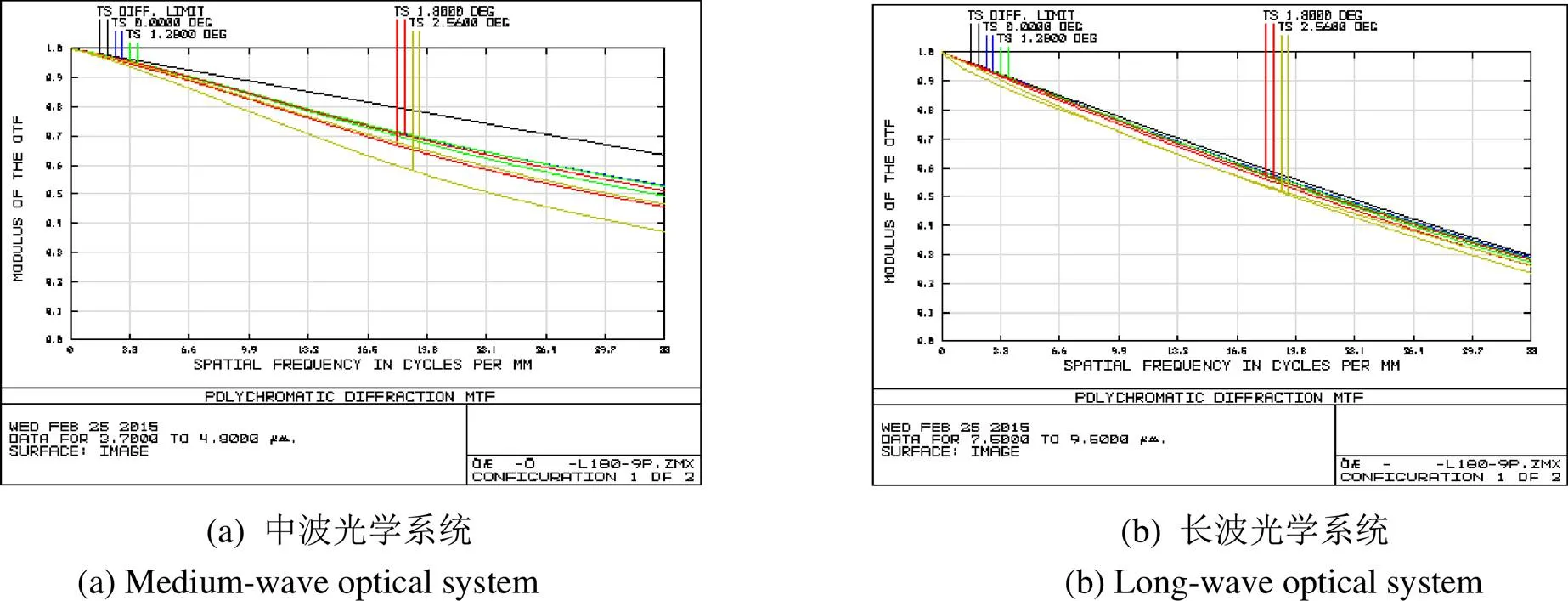
图11 红外光学系统长焦端调制传递函数曲线
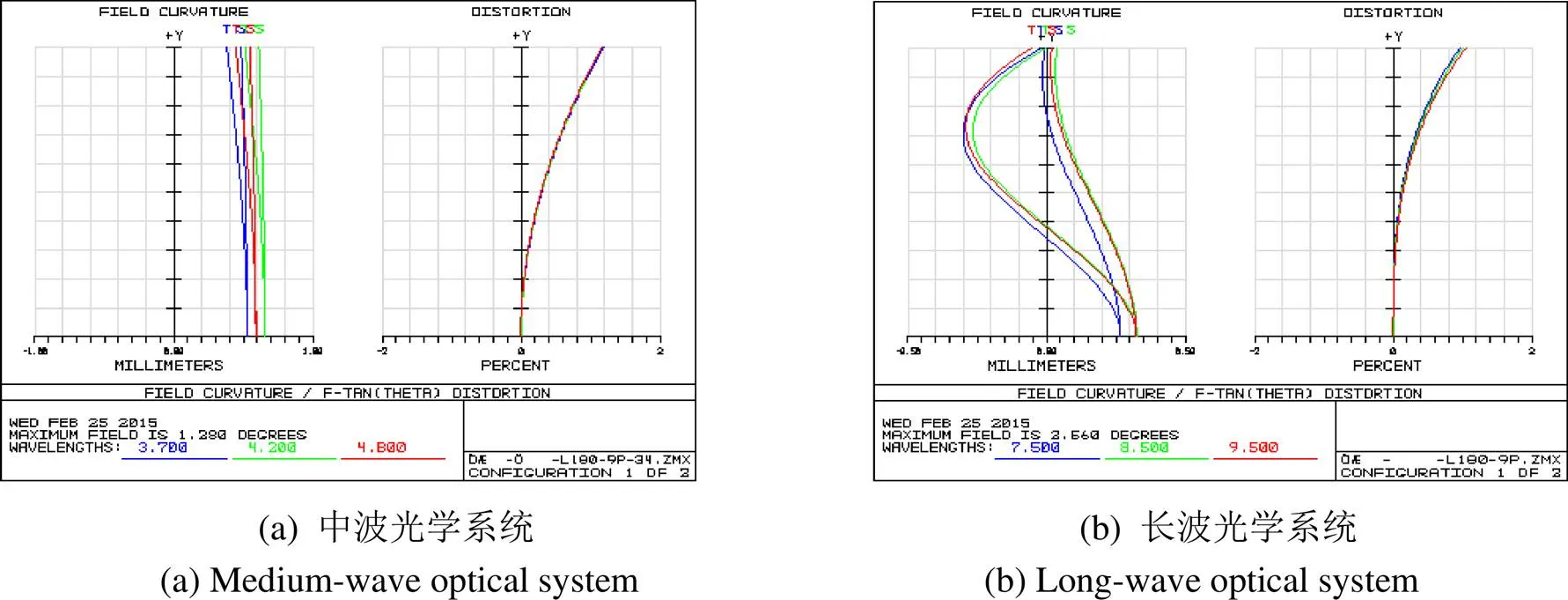
图12 红外光学系统长焦端场曲和畸变曲线

图13 实际成像效果图
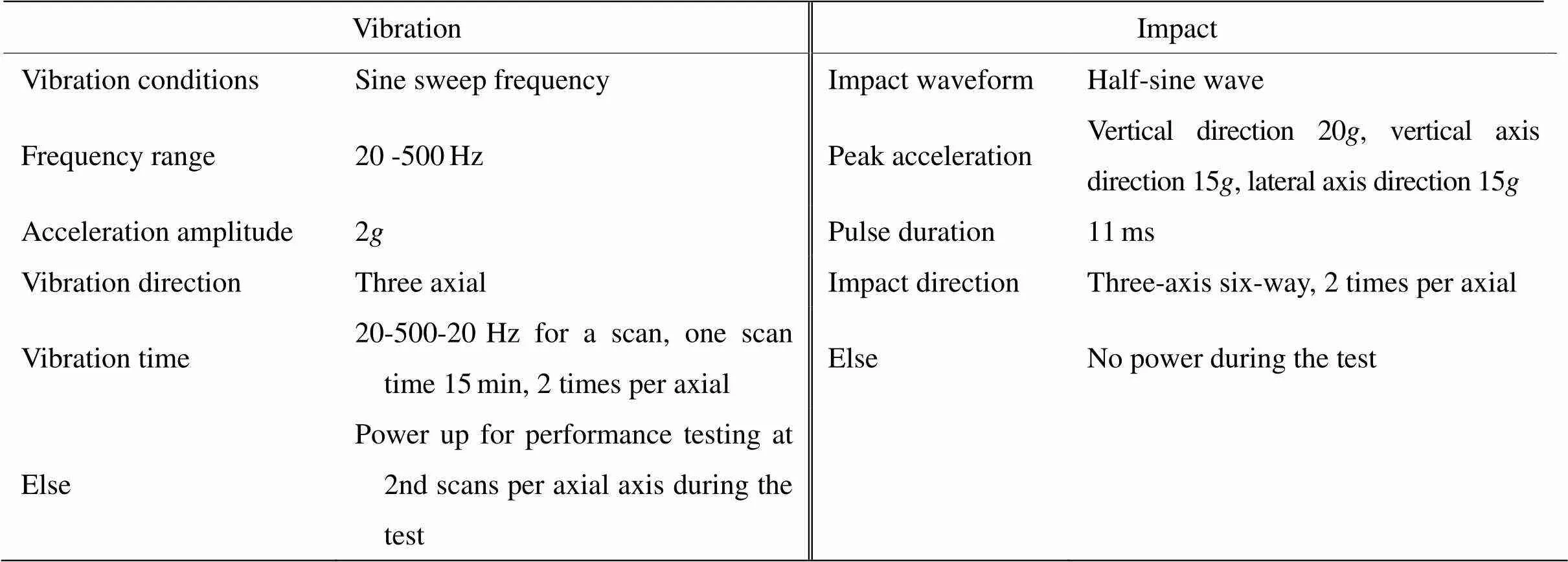
表1 试验条件参数表
测试结果:振动试验在试验前、试验中、试验后对产品进行测试,冲击试验在试验前、试验后对产品进行测试,所有设备测试结果正常。
4.2 稳定精度仿真结果
稳定精度可以通过隔离度进行分析,指稳定平台对载体运动的去耦能力,用载体姿态变化角和框架指向误差角之比的分贝数表征。影响隔离度的主要因素包括以下几点。
姿态扰动的频率:由于载机姿态的变幻不是规律的,频率、幅值时刻处于变化中,因此无法采用理论上可以完全隔离扰动的前馈控制,只能使用反馈控制。而反馈系统的扰动隔离度随着频率的增加而减小。
姿态扰动的幅值:若扰动幅值非常大,超出了伺服系统电机的能力范围,则隔离度必然低于理论计算值。实际系统中,通过合理选择电机驱动能力,可以避免该问题。
陀螺漂移和噪声:陀螺漂移相当于在数据中增加了一项虚假值,造成伺服控制的实际效果中也存在漂移,降低了隔离度;陀螺噪声引入了实际并不存在的白噪声信号,伺服系统对它的响应相当于引入其它扰动源,降低了系统的隔离度。通过选择高性能陀螺和合适的数据处理方法,可以克服该因素的影响。
伺服控制性能:伺服系统设计是决定系统隔离度的决定性因素。伺服控制误差主要与驱动电机力矩、码盘分辨率和控制算法有关。根据吊舱负载,以及本方案选择的电机、码盘和控制算法,建立起吊舱控制模型进行仿真。针对舰船类典型目标,速度慢、机动小,仿真得到的误差不大于0.2mrad。
考虑低频扰动,不影响探测器空间分辨率的低频扰动幅值a的计算公式如下:

式中:是正弦运动周期;e是探测器积分时间;是正弦扰动的峰峰值。
通过计算,在载机摆动0.5Hz,幅度3°的典型过程下,隔离后的扰动幅值a=49.3mrad。如图14所示,根据控制设计仿真,在输入10°/s,0.5Hz的速率干扰下,经陀螺稳定隔离后,速度幅度衰减至0.01°/s。

图14 10°/s, 0.5Hz速率干扰隔离曲线图
4.3 动态跟踪精度验证
系统在外场条件下开展了动态跟踪精度测试,对系统跟踪精度进行验证,设备架设在移动拖车上,对测试跑道上行驶的汽车进行了跟踪,长波/中波小视场、长波/中波大视场,跟踪角偏差均方差统计情况如图15所示。通过不同视场的中长波探测器跟踪目标时的角度偏差值波动情况,可以看出系统能够在活动平台上稳定跟踪快速移动的目标。
5 结论
近年来,红外热成像日益广泛地应用于各种军事技术中,为红外武器的使用提供特征预测。现代武器系统越来越重视通过目标所产生的红外辐射来探测、识别、攻击目标,而发展红外武器系统及目标的隐身性能都要求提供各种典型目标的红外辐射特性[9]。红外成像测量系统是获取目标红外特征分布研究其目标特性的重要手段,而红外成像测量系统在不同环境条件下的稳定跟踪和清晰成像又是测量系统的最需要解决的问题。
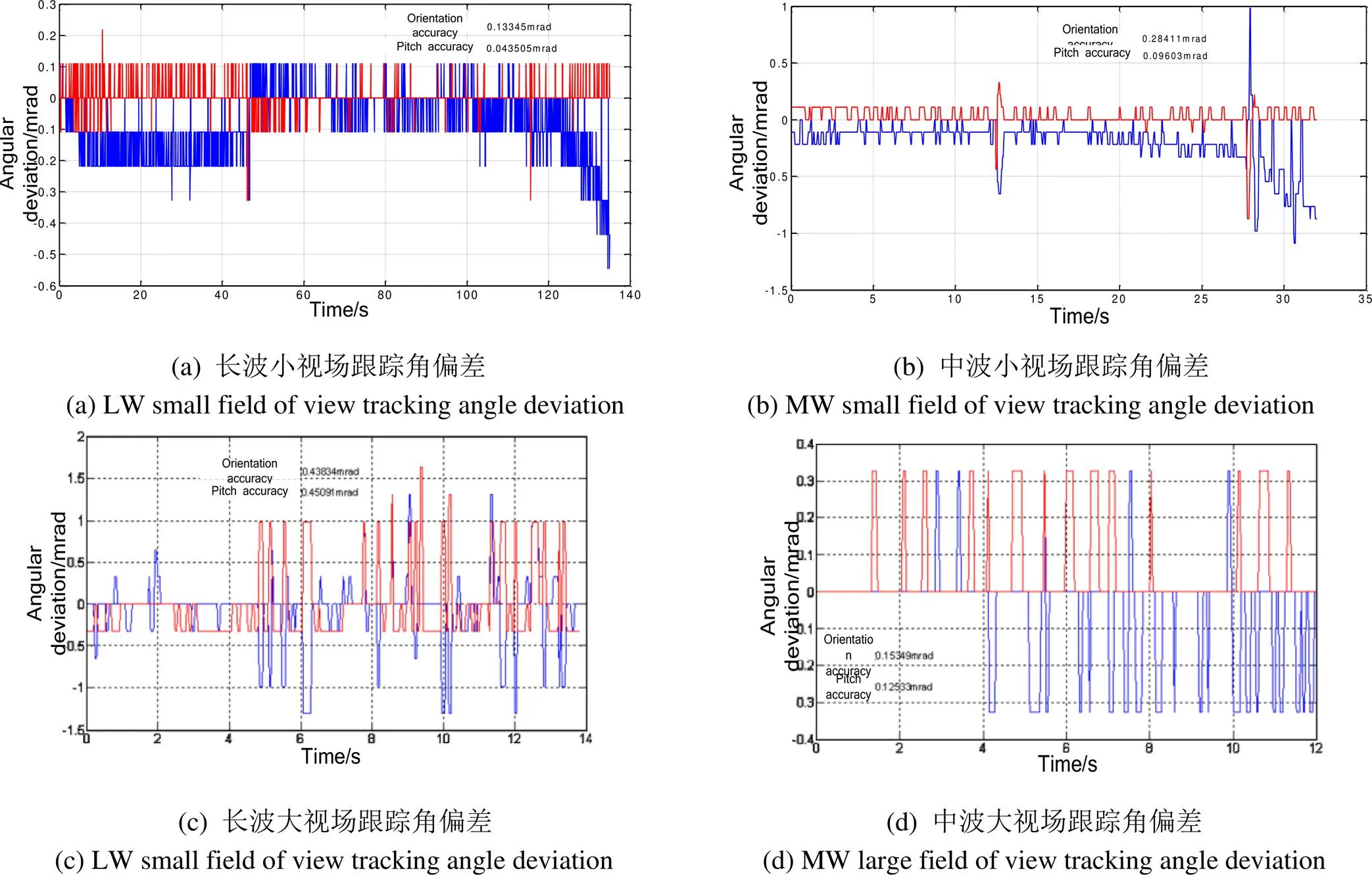
图15 系统动态跟踪精度
本文为了解决这些问题采取的主要措施有:①机载设备结构安装接口上安装减振器,隔离载机起飞和降落时对设备产生的冲击,保护机载设备内部的光学和电子器件。②机载设备的外壳选材、框架设计、电路板加固等方面增加抗冲击和振动的能力,接插件采取密封、灌封等措施,紧固件采取防松处理。③测量吊舱采用被动隔离加主动陀螺稳定控制的技术,通过框架伺服系统抑制低频扰动,被动减振器隔离高频扰动。④光学组件装配通过压紧螺圈和胶粘工艺的配合,提高镜片的抗冲击和振动能力,在环境温度变化时,通过调焦量的补偿,确保成像在不同温度条件下始终清晰。经过系统实际测试证明这些措施合理有效,对红外测量系统实现不同环境下和平台下的稳定跟踪测量,获取目标红外特征提供了重要保障。
[1] 李相迪, 黄英, 张培晴, 等. 红外成像系统及其应用[J]. 激光与红外, 2014, 44(3): 229-234.
LI Xiangdi, HUANG Ying, ZHANG Peiqing, et al. Infrared imaging system and applications[J]., 2014, 44(3): 229-234.
[2] 李刘苗. 海天背景目标红外辐射特性研究[D]. 西安: 西安电子科技大学, 2011.
LI Liumiao. Research on Infrared Radiation Characteristic of Object Under Sky and Sea Background[D]. Xi’an:Xi'an University of Electronic Science and technology, 2011.
[3] 史文欣, 刘仲宇, 王平, 等. 航空光电吊舱隔振器布局方式分析[J]. 激光与红外, 2018, 48(8): 1027-1030.
SHI Wenxin, LIU Zhongyu, WANG Ping, et al. Analysis on vibration isolator layout of aerial optical-electronic pod[J]., 2018, 48(8): 1027-1030.
[4] 杨艳艳, 亓洪兴, 马艳华, 等. 航空红外相机自动调焦设计[J]. 激光与红外, 2016, 46(6): 698-703.
YANG Yanyan, QI Hongxing, MA Yanhua, et al. Design of automatic focusing for aerial infrared imaging camera[J]., 2016, 46(6): 698-703.
[5] 王学新, 焦明印. 红外光学系统无热化设计方法的研究[J]. 应用光学, 2009, 30(1): 129-133.
WANG Xuexin, JIAO Mingyin. Athermalization design for infrared optical systems[J]., 2009, 30(1): 129-133.
[6] 贾晓飞, 李宜斌, 陈德智, 等. 非制冷红外热像仪的快速自动调焦算法设计[J]. 激光与红外, 2009, 39(6): 688-690.
JIA Xiaofei, LI Yibin, CHEN Dezhi, et al. Design of high speed arithmetic of auto-focus in uncooled infrared thermal equipment[J]., 2009, 39(6): 688-690.
[7] 曾戈虹. HgCdTe红外探测器性能分析[J]. 红外技术, 2012, 34(1): 1-3.
ZENG Gehong. Performance HgCdTe infrared detector at different temperatures[J]., 2012, 34(1): 1-3.
[8] 王芳, 罗寰, 王海晏, 等. 机载红外搜索跟踪系统有效探测区域研究[J]. 激光与红外, 2018, 48(5): 585-590.
WANG Fang, LUO Huan, WANG Haiyan, et al. Research on effective detection area of airborne infrared search and tracking system[J]., 2018, 48(5): 585-590.
[9] 范晋祥, 张渊. 新概念红外成像系统的发展[J]. 红外与激光工程, 2008, 37(3): 386-390.
FAN Jinxiang, ZHANG Yuan. Development of new concept military infrared imaging system[J]., 2008, 37(3): 386-390.
Vibration Reduction of Infrared Detection Equipments on Airborne Platform
YE Zongmin,LI Zhuo
(The 93 Department of 91404 Unit, Qinhuangdao 066001, China)
Airborne infrared measurement systems are mounted on aircraft to track and measure the infrared characteristics of the ground target. The impact of platform jitter and environmental change must be addressed to achieve stable tracking and measurement accuracy. To this end, the technology of passive isolation and active gyroscopic stability control was used in this study to examine the influence of airborne platform jitter. To ensure stable tracking and imaging, the high-frequency disturbances were isolated through a passive shock absorber, and the low-frequency disturbances were suppressed through a frame servo system. Non-thermalization compensation calculation and focusing compensation control were adopted in the design of the optical lens to ensure clear imaging of the equipment and thus study the influence of the temperature change of the ground and air environment on the infrared optical system. Simulation calculations and field measurement demonstrated that these vibration reduction measures are reasonable and effective. The equipment thus developed is stable in tracking and clear in imaging. Therefore, it is suitable for realizing hanging flight measurement on different platforms.
infrared detection, airborne, vibration reduction, stability tracking
TP391.9
A
1001-8891(2020)12-1151-08
2020-04-16;
2020-12-07.
叶宗民(1982-),男,硕士研究生,江苏溧水人,研究方向为光学目标特性测试与研究。E-mail: 87757923@qq.com。