基于红外可视化技术的井下测速系统设计
2020-12-29张拓杨倩
张拓 杨倩

摘要:文中提出了一种基于红外可视化技术的井下测速系统。本系统的硬件系统采用PI160热成像仪以及工控机等设备组成,软件开发以VC++为开发平台。本文主要介绍了整个测速系统的工作原理、结构设计和软件设计。本系统将热红外技术和视频测速技术有效的结合起来。
关键词:红外热成像;视频测速;矿井监控系统
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2020)32-0218-02
基于矿山井在实际工作过程中,其主要利用排水泵将地下水抽取到预沉调节池,结合监测技术,进而实现动态监测预沉调节池到吸水井全过程,其对于矿山的安全生产至关重要,同时,水的流速与流量直接相关,因此,测量井下水的流速就显得十分有意义。
视频测速是基于图像处理和模式识别技术,通过摄像头捕捉的目标图像进行测速的方法。普通的可见光摄像头在井下光线严重不足的环境中无法捕捉目标物,红外视频测速技术可以很好地解决在上述问题。同时,根据红外热图可以得到目标物的实时温度。
1 红外热成像原理
众所周知,物体表面温度信息是红外热成像技术的核心要素,主要利用辐射红外线进行探测、成像及扫描,从而构建科学的井下探测系统。当目标物的表面红外线型号转化为电信号后,经过控制器处理后变成物体“动态热图像”。其次,借助红外热成像技术将目标物转化为可视的图像且具有明显的边界,从而使得其具体信息能够被人眼识别。本研究所采取的热图像监测系统也同样运用其运力,通过对目标物进行红外线识别,将图像具体呈现出来,构建基于物体表面温度信息的监测系统。
当前,热成像系统的主要部分是红外探测器和监视器。对于红外探测器而言,其本质上就是一个红外线转化装置,将无法可视的信息变成具体可测量的器件;对于监视器而言,主要利用高清摄像机完成,主要用于图扫描。红外热图可分为两种,一种为伪色彩图,另一种为灰度图。由于红外热图的原始数据来源于被测物体的温度,所以,不管是伪色彩图还是灰度图都可直接反映出被测物体的温度。具体温度数值与成像仪和被测物体的距离、色彩分布等因素有关。
2 视频测速原理
基于视频图像的测速技术是一种较新型的测速方式,采用目标识别与跟踪技术,来实现对运动物体的运动速度的测量。视频测速技术不需使用专业的测速设备,只要通过软件对需要处理的目标对象进行数学建模,即可在视频图像中实现对目标物的识别与跟踪。所以,要实现视频测速必须解决两个问题:目标物的识别和目标物的跟踪。
2.1 红外热图中目标物的识别
现阶段,红外热成像技术在井下测速系统中的创新应用仍面临着三方面瓶颈,主要表现在如下:一是如何有效增强利用热红外图的对比度(科学提取图像信息);二是如何有效提高热红外图的边线界定,主要是背景和物景的合理区分;三是如何有效从复杂的图像信息和噪音中科学提取有用的信息,从而全角度提高物景的识别度。需说明,以上三方面瓶颈具有不同的应用场景和目的,亦对其解决措施各异。其次,将红外热成像技术探测图像与井下测速系统有机融合,首先必须要解决红外热图中目标物的清晰度,充分保证与热红外图形温度场协调统一,从而有效把控实际温度分辨率和可视梯度。当前,基于红外热成像技术的目标识别方法主要通过数理算法,比如非线性外推算法、变分增强算法、直方图算法等。
当前,主要通过热图像仪来获取图像信息,其原理主要是依据[m×n]阵列式算法(探测元)得到热图像信息,可表示为[Pm×n](Pm,n);根据部分国内学者研究结论认为,所获取的热图像信息其对比度、识别度变化值波动较小,同时Pm,n中还包含诸多干扰信息,实际表达信息应该为:
在红外热成像技术实际应用过程中,一般[Sm×n]较为稳定,而[Nm×n]相反,其信息变化幅度较大,具有表现为:[Sm×n]信息信号较弱时,而[Nm×n]信息信号相比于[Sm×n]占比较大,基于这一优势,可连续不间断采集l帧信息,通过[m×n]阵列式算法得出优化后的[Gm×n],具体为:
式中:[Sm×n]基本保持不变,主要通过对其进行线性累加。[Nm×n]可能会随时发生变化,主要分为两种情况,一是当图像信息表现为静止信号,l趋向于无穷大,其 [Nm×n]的均值和代数值会趋向于0(线性迭加),二是当图像信息表现为准静止信号,l会变成具体的数值,均值和代数值会有很小,同样会认为趋向于0(无线性迭加现象)。鉴于此,优化后的[Gm×n]矩阵主要目的就是从根本上消除[Pm×n]的单一性,从而增加信息采集的準确性,可以将(2)式简化为(3)式,具体为:
简化后的[Gm×n]矩阵中采集次数1的大小对于有效解决噪声干扰具有重要作用。首先,同时,对于|[Bm×n]|、|[Fm×n]|及|[Bm×n-Fm×n]|值的大小有着直接联系。采集次数1的数值的选取主要依据以下几点原则:静止信号或图像移动速度较小选取较大值,反之准静止信号或图像移动速度较慢选取较小值。在实现了目标的捕捉之后,针对整个画面建立坐标系,由此就可得到目标物的坐标值,为下一步计算速度奠定基础。
2.2 测速原理
常见的测速方式有四种:雷达测速、地感测速、激光测速以及视频测速。相对于前三种测速方式而言,视频测速具有价格便宜,全天候工作无辐射等优点。“视频测速”是指不使用专用的测速设备(如线圈、雷达、激光等),仅仅安装一个视频摄像头,便可获知监控对象的实际运动速度。
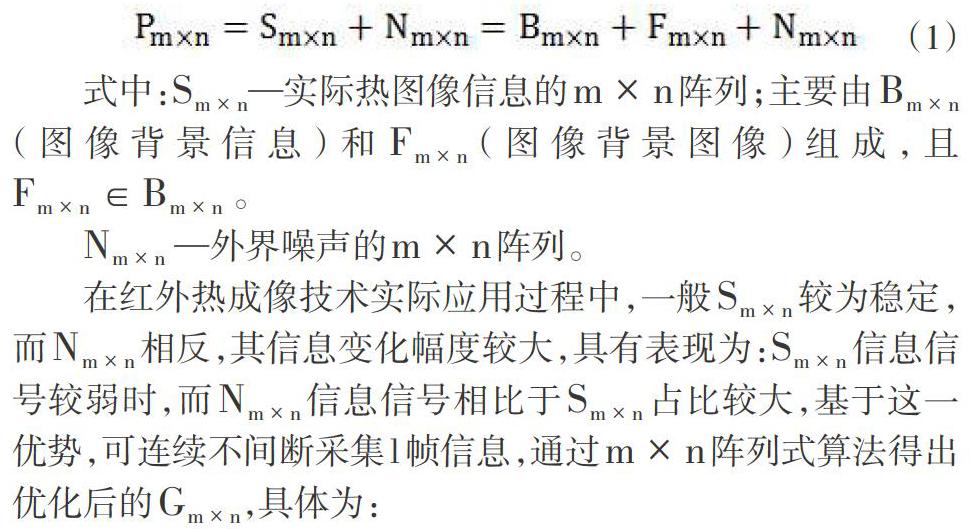
画面中高度为[X1]的某点,根据投影关系,可以计算出[X1]距离摄像头底部的实地距离[SX1],如图1视频测速原理示意图所示。
利用三角函数关系,不难得出:
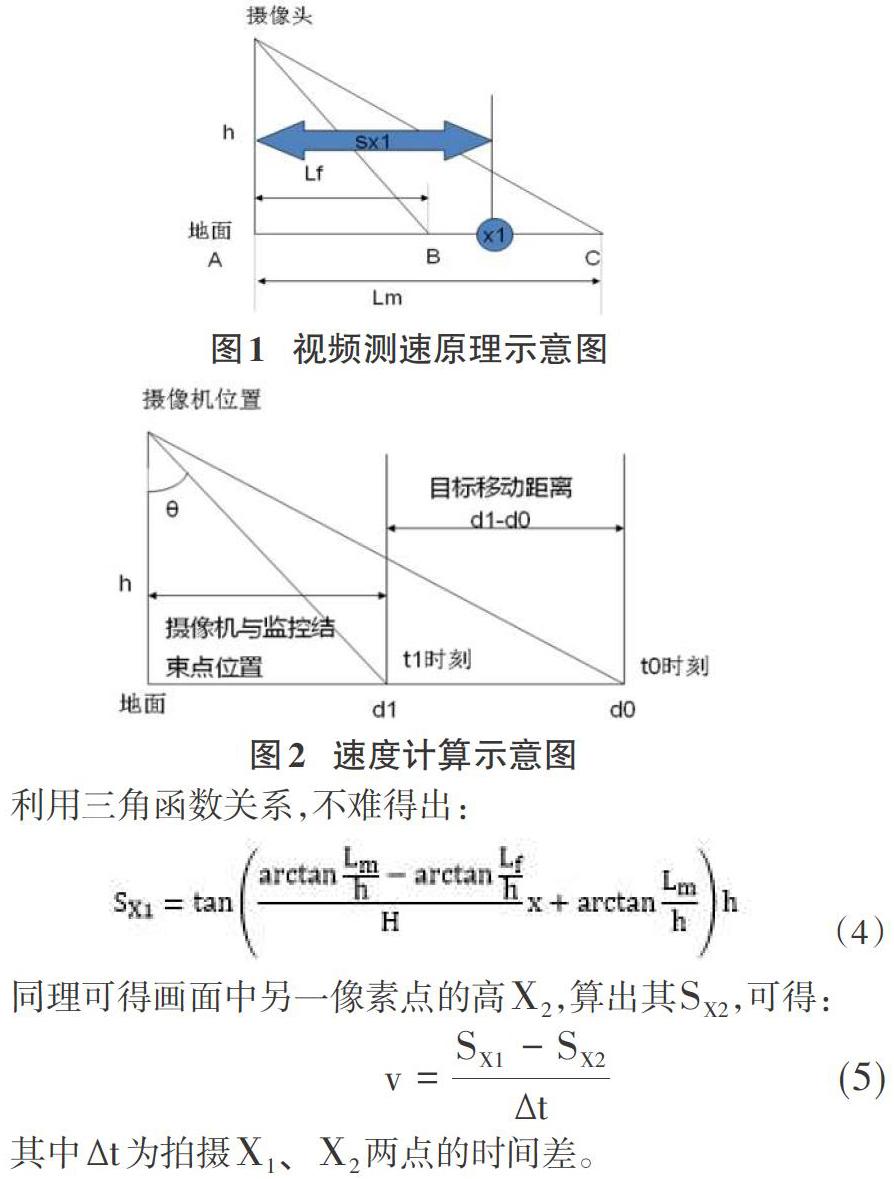
同理可得画面中另一像素点的高[X2],算出其[SX2],可得:
其中[?t]为拍摄[X1、X2]两点的时间差。
如果知道摄像机的俯角[θ]、摄像机离地面高度以及摄像机拍摄角度就可以直接根据三角公式距离,继而求出速度,如图2速度计算示意图所示。若时间间隔非常小,即趋近与无穷小时,其次的平均速度可视为实时时刻速度。
3 系统整体设计
红外热像监控系统是一个计算机为核心的监测控制系统,涉及多种计算机的信息处理技术,包括多媒体技术、通信技术、视频技术、图像处理技术等。红外热像监控系统主要用于矿井下数据采集处理设备。它主要由数据采集终端、通信接口设备、视频采集设备、视频显示设备、电源转换模块等组成。
在视频图像处理方面,直接由井下的工控机接收数据采集终端采集来的视频图像数据,再由数据显示终端进行监控视频显示。同时可向井下数据采集终端发送下行控制命令,实现对数据采集状态的调整与控制;井下数据处理中心处理实时图像数据,分析区域温度数据,以及通过处理热红外图像计算流速数据。
本系统是集视频图像采集、视频图像处理、环境监测为一体的监控系统,能够及时、准确地将监测过程中的图像画面、环境参数等数据反映到显示终端上。当日常监控中,工作人员可以根据本系统提供的各项类型参数,迅速了解矿井区域内的环境,保证矿井下的安全。
以往就是使用视频测速技术,井下巷道内昏暗的光线条件拍摄出来的视频图像昏暗,根本无法进行后面的图像处理的工作。本系统采用的热红外成像仪可以再煤矿井下光线不足的巷道内拍摄出清晰的图像,为接下来的图像特征提取等工作打好基础。采用红外热成像技术,不仅解决了井下巷道内光线不足的问题,同时,还可进行温度的监测,可谓一举两得。
4 结束语
基于红外可视化技术的井下测速系统,可以对井下明渠水流流速状况进行实时的监控,避免了传统监控方法的弊端,红外热成像技术还解决了一般摄像头在矿井下光源不足时图像的识别困难。除此之外,本测速系统额外的可实现水温,包括环境温度的实时监测。对该系统稍作改变,同样可用作井下机车的测速系统。在监控中心可实现井下明渠流速的实时显示,亦可将监控视频存储下来,可随时进行浏览查询,在红外热成像技术的创新应用背景下,可有效且动态地熟知矿井下的基本情况,从而实现现代化煤矿的可持续发展。
参考文献:
[1] 武斌.红外弱小目标检测技术研究[D].西安:西安电子科技大学,2009.
[2] 闫琪娇,张劲松,长鑫.煤矿井下机车的红外视频测速[J].煤矿机械,2012,33(2):205-206.
[3] 林丽.红外热辐射可视化方法研究与实现[D].哈尔滨:哈尔滨理工大学,2011.
[4] 尚磊.红外成像系统关键技术研究与实现[D].西安:西安电子科技大学,2013.
[5] Torres S N,Hayat M M.Kalman filtering for adaptive nonuniformity correction in infrared focal-plane arrays[J].Josa A,2003,20(3):470-480.
【通聯编辑:李雅琪】
