永磁同步电机的等效SVPWM调制方法研究
2020-12-29鞠全勇
郭 语,鞠全勇
(金陵科技学院机电工程学院,江苏 南京 211169)
随着电机技术的发展,永磁同步电机(PMSM)替代有刷电机已经成为主流趋势。近些年,针对PMSM的驱动控制方法在各行各业进行了广泛的研究[1-4]。充分发挥PMSM的优势,提高电机的控制效果一直是主要研究热点之一[5-6]。矢量控制结合空间矢量脉宽调制(space vector pulse width modulation,SVPWM)是PMSM的主流控制方式[7-8],但传统的SVPWM调制是在采集三相电流、经过坐标变换后再通过电压矢量合成实现的[9],这种方式需要利用电流传感器采集电流,并经过Clark变换、Park变换和Park逆变换进行电流环控制,因此会增加硬件成本和软硬件的复杂度。
本文采用波形描述方法,预先生成一个电周期的SVPWM调制波形数据表,利用速度闭环输出调制电压幅值,结合查表法实现等效SVPWM调制控制。
1 传统SVPWM调制原理
传统SVPWM调制一般是基于电流检测并结合矢量控制实现的,图1为典型的PMSM速度闭环控制系统框图。采集三相电流,并经过Clark变换和Park变换得到q轴电流Iq和d轴电流Id,然后分别与设定值比较计算误差值,经过Park逆变换转化为两相静止参考坐标系中的电压Uα和Uβ,最后通过SVPWM调制输入三相逆变器从而实现电机驱动控制。
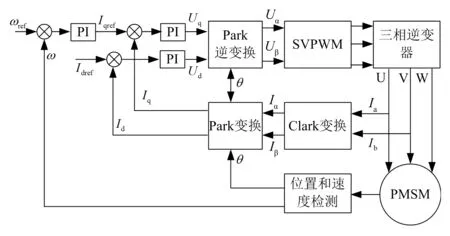
图1 PMSM速度闭环控制系统框图
传统SVPWM调制方法一般基于电压源型三相逆变器实现,其原理如图2所示。每一相在同一时刻只有一个桥臂会导通,设开关状态组合Sx=[S1,S2,S3],其中S1,S2,S3分别表示上桥臂的开关状态,0为断开,1为导通,则不同的开关状态可形成8种组合,对应8种电压空间矢量。
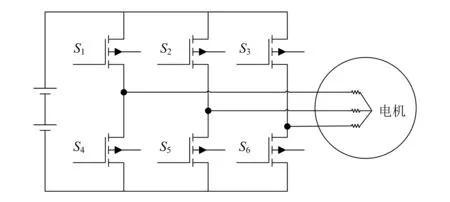
图2 三相逆变器示意图
将一个电周期划分为6个扇区,每60°为一个扇区。磁链空间矢量可以等效为电压空间矢量的积分[10],SVPWM的思想是控制参考电压空间矢量Uref的轨迹为圆形,从而形成圆形磁场。将Uref分解为静止参考坐标系中的电压Uα和Uβ,再通过SVPWM算法计算得到电机的三相端电压,各相端电压均为含有三次谐波的马鞍波,具体技术原理可参阅文献[11],本文不再赘述。
2 等效SVPWM调制方式
为了降低软硬件的复杂度和成本,本文利用波形生成器预先在软件中生成一个电周期的端电压波形数据表,通过查表法结合速度闭环控制的方式实现PMSM的速度控制,控制框图如图3所示。图中ωref为设定转速,ωfed为实际转速,UAmp为端电压幅值,θ为转子当前位置角度。角度传感器为增量式光电编码器,采用M/T法测量电机转速,DC为24 V直流电源,电机为四对极三相PMSM。

图3 等效SVPWM调制速度控制框图
2.1 位置与转速计算
根据当前转速,预设转子转过30°电角度所用时间T为转速计算周期,设T时间内测得输出脉冲数为N,编码器每圈输出脉冲数为M,对转子位置角度θ及转速ωfed进行计算,则有:
(1)
(2)
式中:θ0为上一次采样位置角度。
2.2 波形生成器
利用WaveStar软件对传统SVPWM所生成的马鞍波进行分解分析,可知波形中含有的主要分量为3次谐波,幅值为基波的21.45%,则等效SVPWM波形电压可表示为:
UTab=sinθ+0.214 5sin(3θ)+Udc/2
(3)
式中:Udc为直流电源电压;θ取值为0°~360°,控制程序中以1°为间隔取值,形成360个数据的电压波形描述表。
利用角度传感器结合式(1)、(2)得到转子位置角度θ和转速ωfed,通过速度环PI(比例、积分)控制器得到所需马鞍波端电压的幅值UAmp。将转子位置角度和电压幅值输入波形描述表,输出得到三相相差为120°的等效SVPWM调制波形,如图4所示,图中U、V、W分别表示输入给电机的U相、V相、W相端电压,A点为U相端电压最大幅值处。

图4 三相端电压目标波形
本文采用ELMOS公司出品的E523.05单片机作为主控芯片实现PMSM的等效SVPWM调制控制。该型单片机主频为48 MHz,MOS管驱动频率为16 kHz,采用中心对称方式生成脉冲宽度调制(pulse width modulation,PWM)波形,则PWM模块对应的计数器最大值为:
PWMPRD=48 000 000/16 000/2=1 500
以图4中的A点为例,设其对应的转子位置角度为θU,所需电压幅值为UAmp,控制程序通过PWM模块比较器生成上下互补的两路PWM驱动信号。同时,为了防止上下MOS管直通,加入1 μs的死区时间td。输出的U相PWM波形如图5所示。
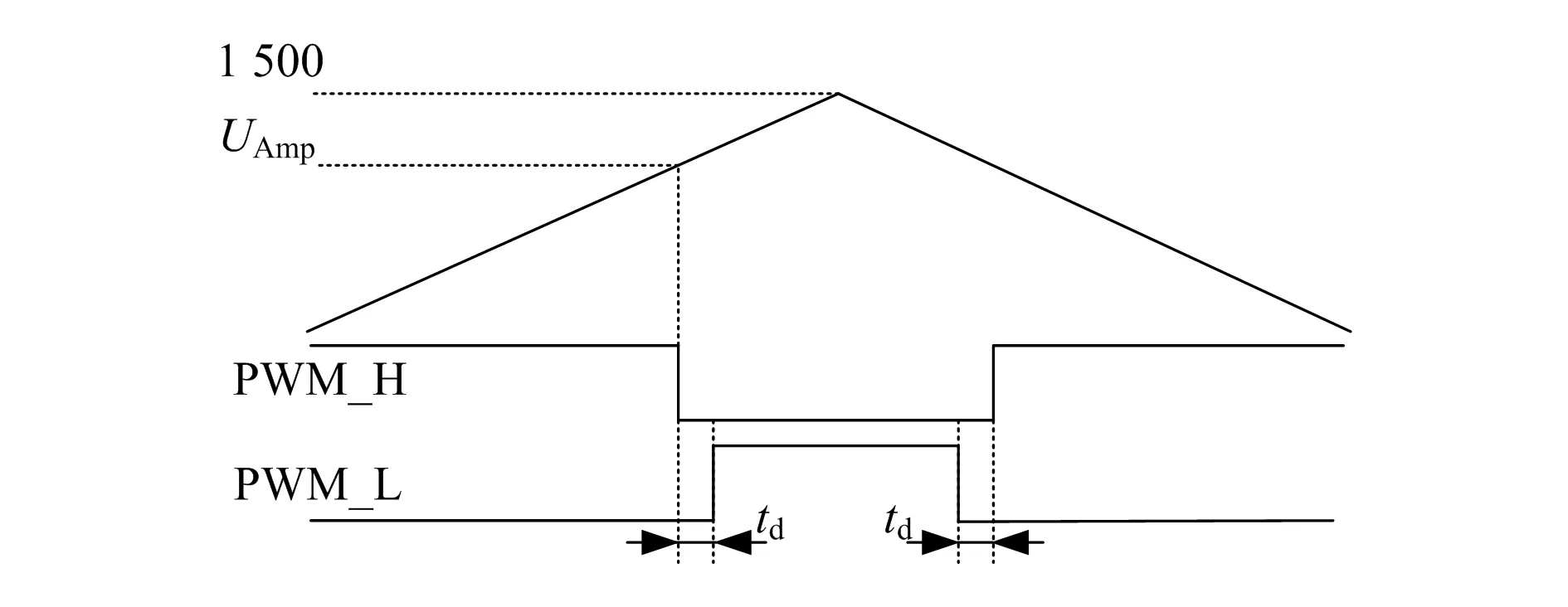
图5 U相PWM波形
V、W两相分别与U相相差120°、240°,转子位置角度分别为(θU-120°)和(θU-240°),查表得到两相所需电压,PWM波形输出与U相同理。基于等效SVPWM调制的速度闭环控制流程图如图6所示。
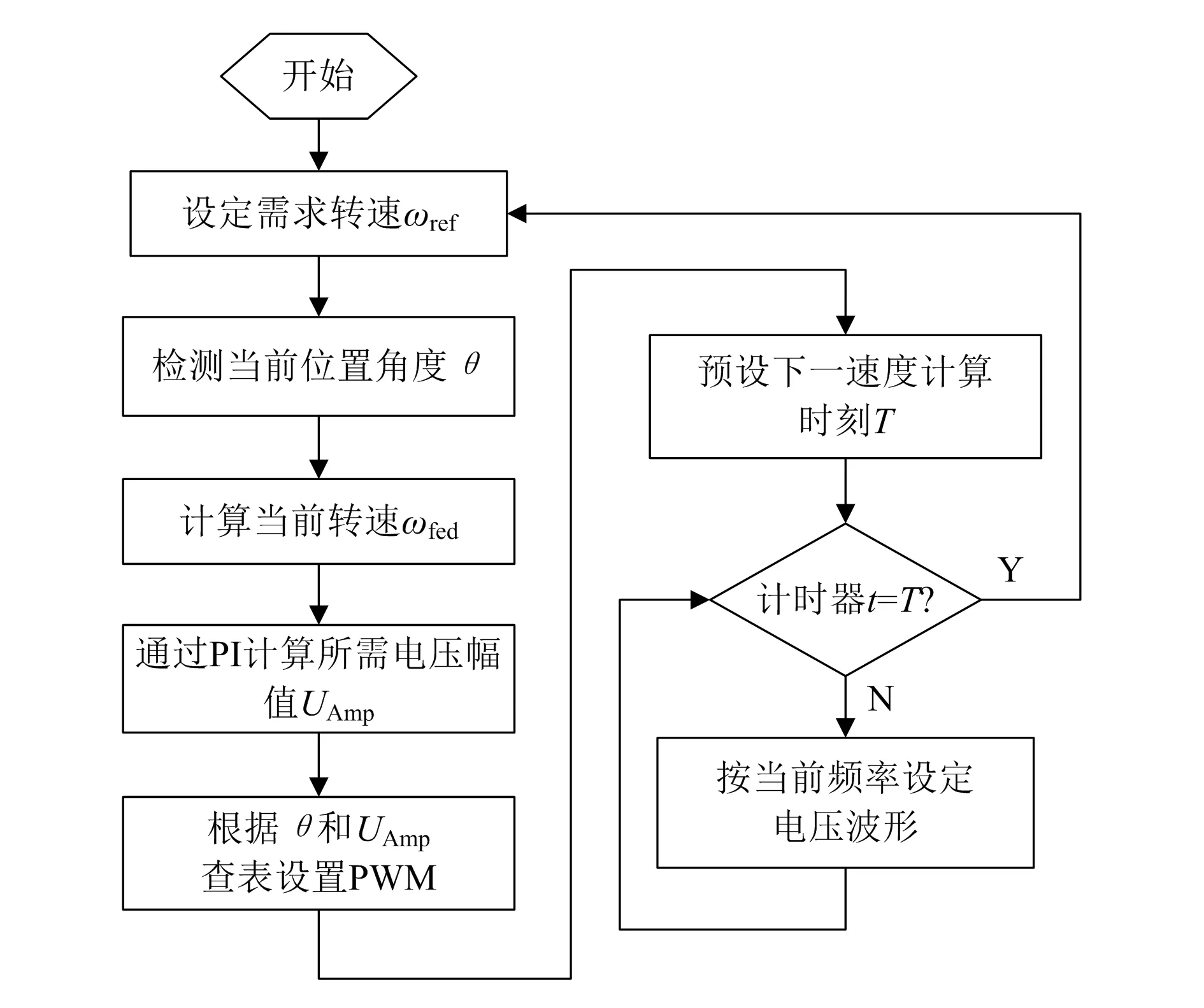
图6 速度闭环控制流程图
3 实验验证
为了验证本文所提方法的正确性,搭建了三相PMSM控制系统,如图7所示。设定电机转速为2 400 r/min,以16 kHz的频率驱动电机,DC为24 V稳压电源。由于电机是感性负载,会导致相电流滞后于端电压,实际控制时,速度环输出的调制波形幅值相位需要前移一个超前角。通过多次标定实验发现,当转速为2 400 r/min时,超前角取值27°可使电机具有最高效率。
图7 PMSM控制系统
利用示波器测量U相端电压,同时对该相端电压滤波,结果如图8所示。可以看出,滤波后的电压为标准的马鞍波,与理论所需波形一致。图9所示为三相滤波后的端电压输出波形,从图中可以看出三相端电压均为马鞍波,且相位相差为120°,与理论一致。图10所示为三相逆变器上桥MOS管输出波形,驱动频率为16 kHz。图11所示为U相端电压和相电流输出波形,从图中可以看出,相电流波形为正弦波,正弦性较高,表明本文所提方法可实现PMSM的稳定运行。
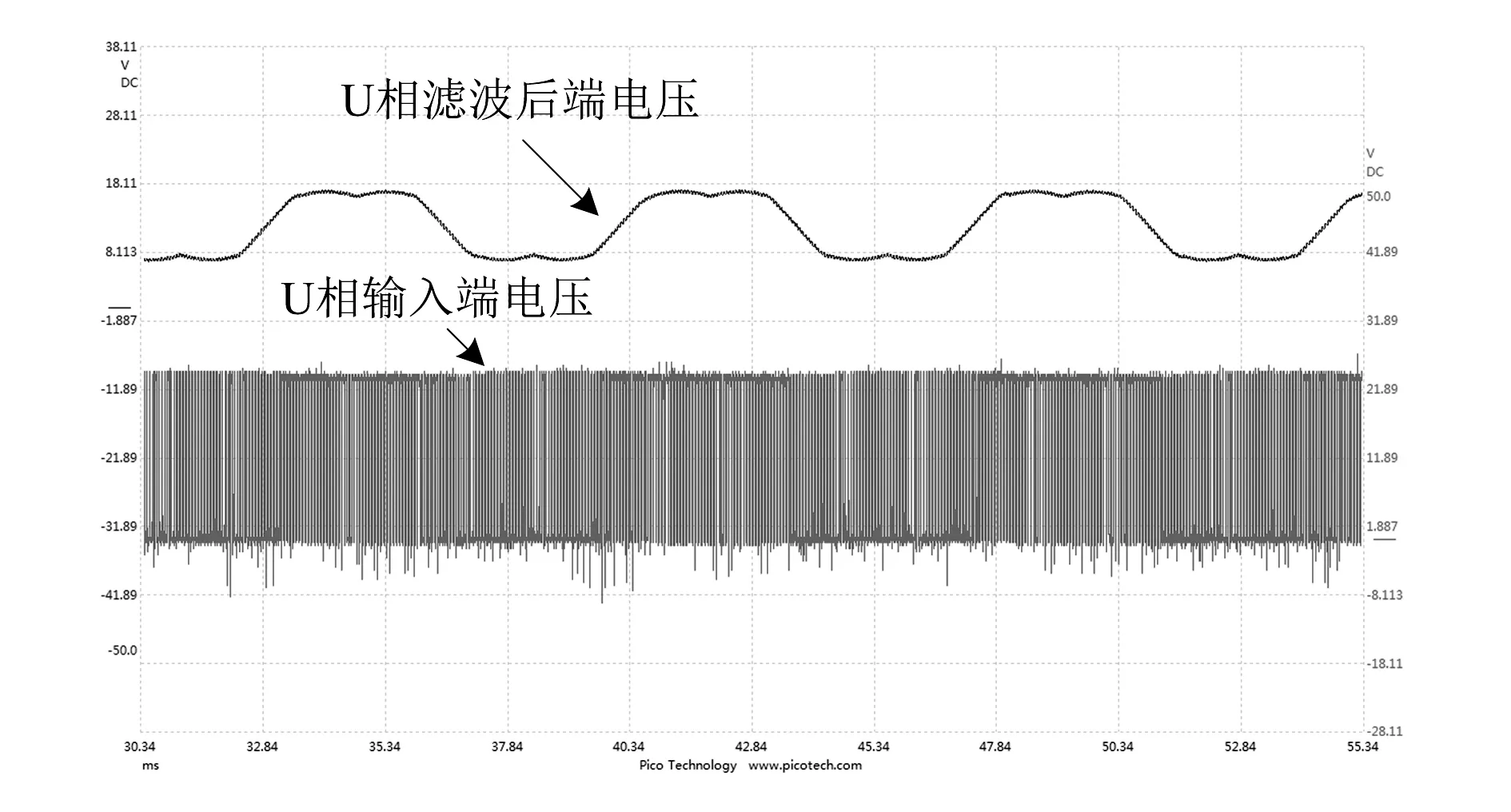
图8 U相端电压及滤波后的电压
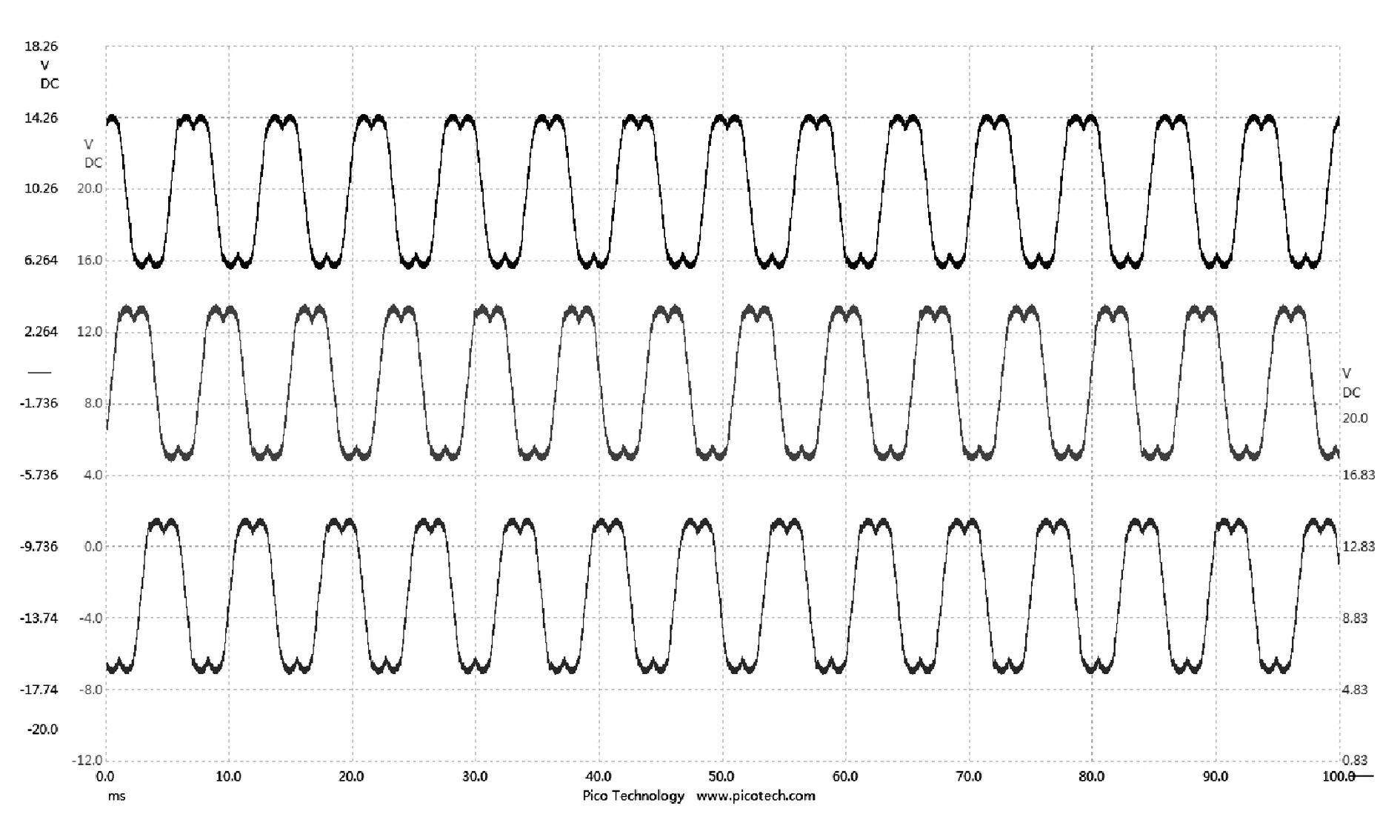
图9 三相端电压滤波后波形

图10 三相上桥臂MOS管输出
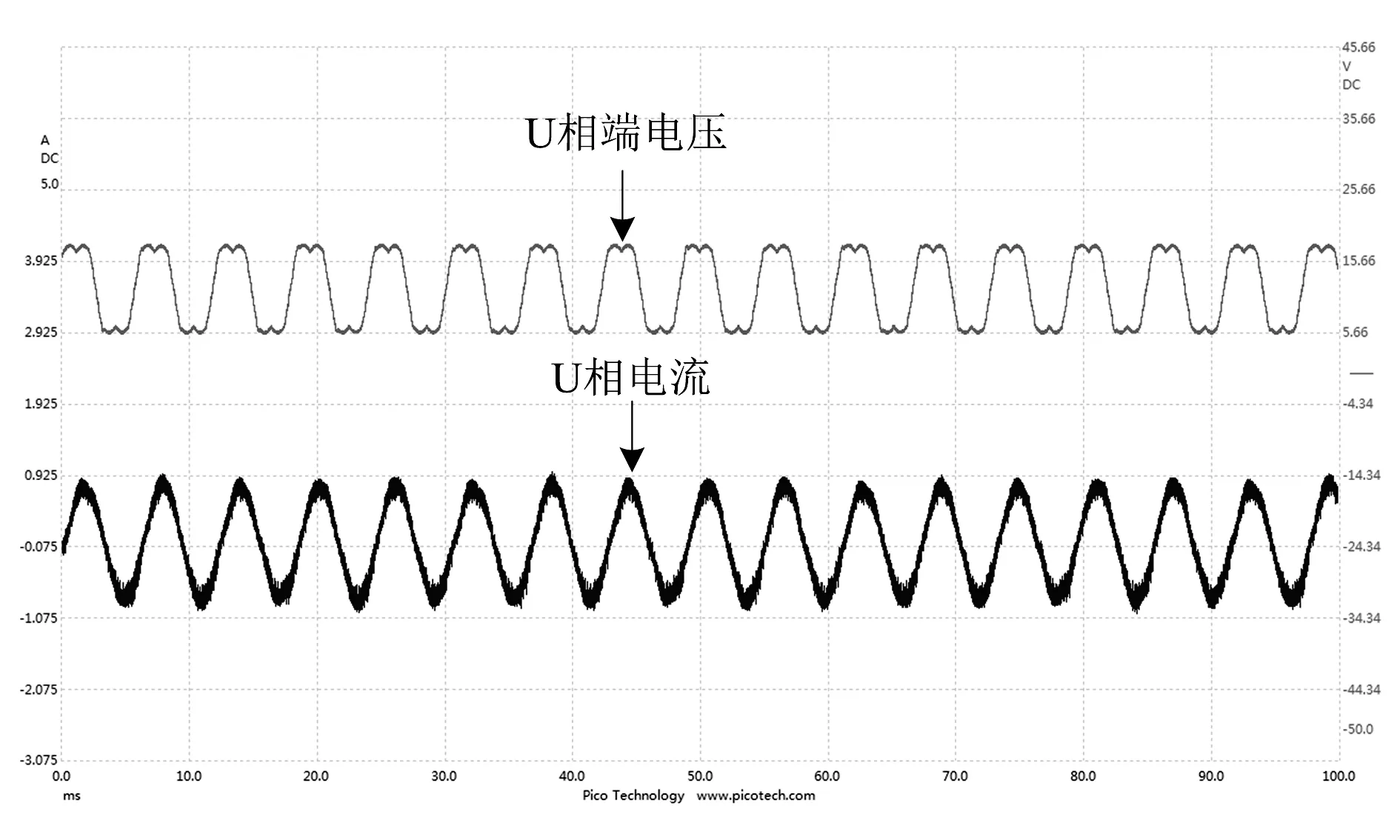
图11 U相端电压及相电流
4 结论
本文提出了一种等效SVPWM调制方法,并通过实验进行了验证,得到结论如下:
1)软件内部预置SVPWM调制波形,通过速度环输出作为调制波形电压幅值,无需采集三相电流进行坐标变换,降低了硬件成本和软硬件复杂度。
2)方法具有可行性和有效性,电机相电流正弦度较高,电机可以实现稳定运行。
