河道污染源排查与成果处理技术分析
2020-12-29张小路
张小路
上海水辰信息科技有限公司 上海 200126
随着水利现代化建设进程的加快和生态文明城市建设的需要,河道水环境已成为各地经济发展,民众安居乐业的重要载体,是群众生活质量保证的重要体现,特别是开展社会主义新农村建设后,农村河道环境整治工程同时也得到了各级政府的高度重视。
水污染防治是生态环境保护的一个重要组成部分,水环境监测、污染溯源则更是防治工作的基础。以往靠人工方式,难以满足全面监测、精准治污的需求。采用全自动暗管探测无人船搭载侧扫声呐、定向定位仪等设备进行暗管排查和定位,无人船技术的应用可以替代人工在环境复杂或者污染严重的水域作业,良好的稳定性让其在采集面广,采用作业持续时间长的项目中也能确保了探测任务的顺利完成和数据采集的精确度。使用CORS-RTK进行各种污染源的平面位置进行定位,并在AutoCAD地形图上标记。采取岸上、水上同步实地调查的方式,利用多种手段现场调查排口所属单位、排口性质等资料,根据排口具体情况采取便携式流量计及其他方式测量排口流量。在做好上述要求的同时,尽可能收集更多的现场照片、排口其他信息等资料。
1 平面定位的技术手段
1.1 RTK技术
RTK(Real - Time Kinematic,实时动态)载波相位差分技术,是一种可以将两个进行测量工作站点所取得的载波相位的观察与测量,做出实时的处理的一种差分的形式,并且将所收集到的相关的信息发送到用户的接收设备上,从而做出相关的求差的解答与计算方面的坐标。此种方法是一种新型的运用卫星来进行相关位置的确定的测量方面的形式,在之前的测量当中,要对静态及动态都做出相关的测量之后,测量结束后再来解算,从而得到高的精确度,但是RTK却可以实现实时的处理,其所运用的是载波相位动态实时差分的形式,这也标志着GPS得到重大的发展,此种技术的出现,使得地形测图及相关的控制测量都有很大的进步,使工作效率得到有效提高[1]。
1.2 CORS系统
由于当前建立起了用途多种多样的参考站系统(CORS),并且也建立起了多个基站共同组成的网络形式的RTK,使得之前的RTK技术运用中,所出的误差会受到距离及可可靠性等的影响因素得到缓解。在这个当中,虚拟性质的参考站技术(VRS),此种技术因为它所涉及的范围比较大,而且定位非常精准,具有高度的可靠性,从而在当前得到了极为广泛的运用。其的运用的主要是在网络当中的基站点进行原始数据方面的观察,并可以进行实时的处理,对所得到的数据做出重新建立与模拟,从而可以实时对高度精准的导航提出相关的定位信息。
比如上海现九个GPS的基准站,对全市范围都有所覆盖,并且建立起了整个上海市的虚拟性质的,进行相关参考站网络体系。在运用无线网络系统,得到了相关的数据之后,进行计算之后的地区坐标可作为目标,并将进行坐标的转换的服务设备和相应的客户端联结起来,并进行相关的设置与试验活动,从而使得数据得到平稳的收发[2]。
2 污染源排查技术
2.1 暗管探测无人船技术
暗管排查使用全自动暗管探测无人船搭载侧扫声呐和定位定向仪,该无人船采用碳纤维、玻璃钢、凯夫拉复合材料,全船水密、防沉、防颠覆,保证了船体的航行平稳。由于吃水浅,该船可抵达有人船无法抵达的测量区域。拥有国际领先的自主航行、自主避障、手动控制等技术,以及智能控制终端及实时远程通信功能,达到暗管探测的自主化以及信息传递的即时性。
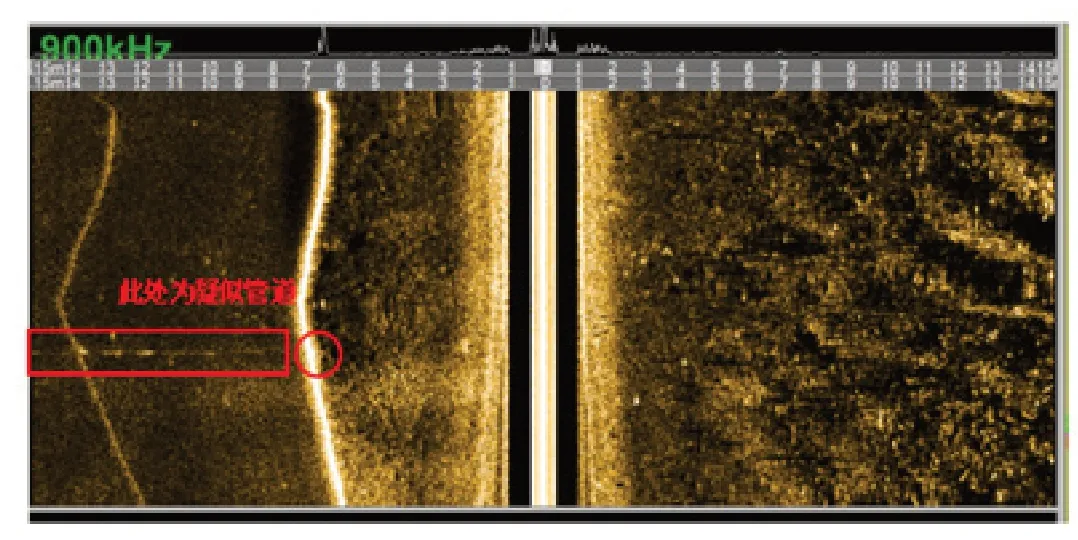
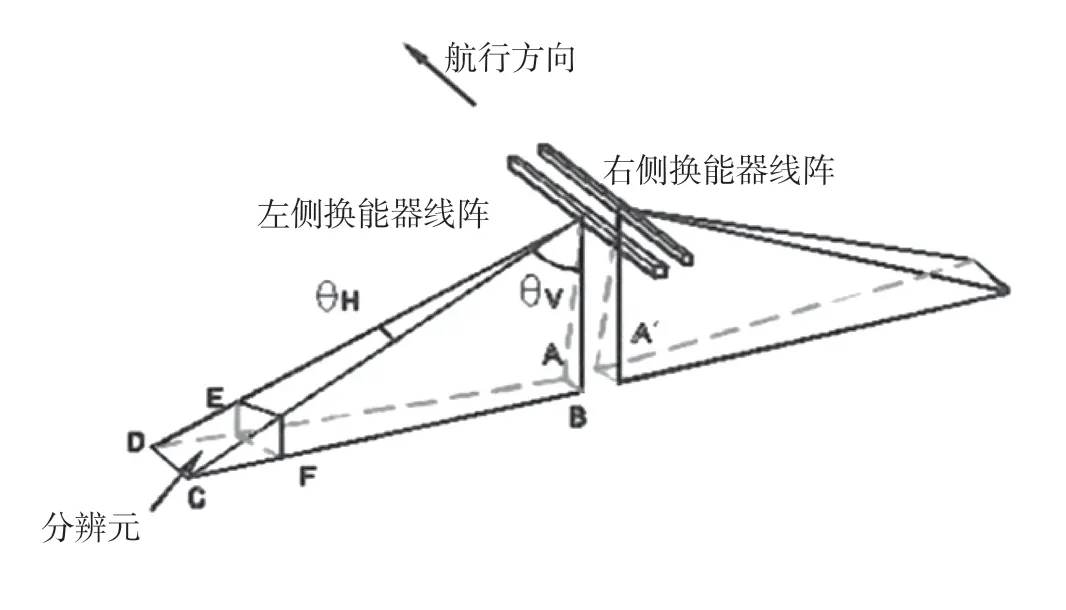
管暗探测无人船对河道两岸进行暗管探测,探测的声呐图像实时传输到电脑基站系统中,技术人员实时观察河流底部和两岸的声呐图像,对疑似点进行反复探查,结合后期的详细分析,判断是否存在暗管,通过定位定向仪,可精确定位坐标位置和获取具体参数等信息。其探测原理是利用水底表面物质背散射特征的差异来判断目标物的沉积属性或形态特征。侧扫声呐作业时向两侧发送宽角度( 垂直方向) 声波波束,可以覆盖水底大面积区域,通常单侧每个条带探测宽度可以达到数十米到数百米,然后接收水底返回的背散射数据对水底进行成像[3]。
无人船版侧扫声呐,可发射900kHz的CW及Chirp信号,拖鱼接收到回波信号并进行处理后,把回波数据通过水下缆传送给接收单元,声呐显控软件对回波数据进行转发、解析、处理后形成高分辨率、丰富细腻的图像数据,同时保存为OTSS及XTF格式数据,可用于回放。
疑似暗管的经纬度坐标如下表所示:

编号 纬度 经度 水深1 22.563167 114.141767 1m
2.2 明管、泵闸、涵闸、桥洞等排水口调查
采取岸上、水上同步实地调查的方式,对河道已封堵排口、泵闸/站、涵洞/管等的坐标位置进行定位,现场拍照,并用红色油漆进行标记,做好现场信息记录[4]。
3 成果处理和汇总
3.1 平面定位数据处理
利用GPS手簿导出记录点号的城建坐标数据如下:
000,,-38511.2044,-19921.6952,3.6389
001,,-38514.6059,-19902.8693,3.6790
002,,-38518.3666,-19883.0791,3.6125
利用程序读取各个点号的城建x坐标和y坐标,利用CAD点标注“po 城建X,城建Y”,文字标注“-text 城建X,城建Y 0.12 0文字信息”,批量生成对应污染源排口的点标注和排口名称的命令,导入到已拼接完成的现场地形图上,注意点位信息和现场照片信息要一一正确匹配以及不同排口类型的图例区分[5]。
3.2 暗管排查数据处理
利用无人船搭载声呐设备进行暗管探测工作,暗管探测无人船的探测精度不小于3cm。提交相关声呐工作录像,并标注疑似暗管的经纬度位置。由于侧扫声呐图像识别容易受水草、芦苇、废弃管道等不确定性因素影响,暗管的确认需要进行现场复核,最终确认其排口类型和真实性,如下图示例所示。

疑似暗管的经纬度坐标如下表所示:

编号 纬度 经度 水深1 22.563167 114.141767 1m
3.3 污染源排口数据统计
将现场排查的图片、定位、类型等信息进行一一统计,汇总成表,照片名称与表格上名称编号一致,CAD标注排口编号与表格一致,城建坐标和经纬度坐标与现场定位时记录保持一致,暗管排口需截取现场的侧扫声呐图片,方便现场复核和确认,统计示意表如下[6]:

照片 河道名称 类型 城建X 城建Y 纬度 经度 cad标注 备注**河1 **河 明管 -38511.2044 -19921.6952 31°11′54.68039″N 121°21′02.89867″E CN8-**河-明管01**河2 **河 泵闸 -38514.6059 -19902.8693 31°11′55.16001″N 121°21′10.36103″E CN8-*河-泵闸01**河3 **河 暗管 -38518.3666 --19883.0791 31°11′54.32421″N 121°21′05.05136″E CN8-*河-暗管01 疑似污水口
4 结束语
(1)需要做好充足的前期准备工作:准备好申请书、项目情况等材料,申请排查区域内的AutoCAD地形图和平面控制点资料,组织项目参与人员进行实地踏勘,了解工作区域范围内的控制点、地形、水情以及交通情况,对收集的资料和踏勘资料进行整理和分析,制定详细的技术路线、进度安排和项目实施等方案,由于暗管探测无人船搬运不是很方便,需要充分考虑上下船的位置。
(2)排查工作宜选在晴朗天气时进行,如遇管道有排水现象,需进行采样,带回实验室进行分析和化验,注意水样的运输和保存。
(3)暗管探测受侧扫声呐分辨率的影响,对管径为15cm以下的暗管排查存在一定的难度,对于河道宽超过30m的河道,需要左右两边分别排查一次,确保侧扫声呐的声波路径完全覆盖排查区域。
(4)暗管探测无人船的搭载的定位定向仪精度为亚米级,如需获得更加精确的定位,需要借助于RTK和cors技术,利用GPS进行精度定位。
(5)平面定位受到周边房屋、树木、高压线等不确定因素的影响,可能存在固定解失效和卫星数据不足等现象,影响定位的精度,需要借助全站仪测量等手段确定。
(6)对于需要排查污染源排口的高程,需要利用水准仪引测国家水准点来确定,精度要求不高时,可采用静止水面进行高程传递。
