一种基于RC支路主动补偿的新型直流断路器
2020-12-29黄亚峰王淳民严干贵孙晓清
黄亚峰,王淳民,严干贵,周 银,孙晓清
(东北电力大学电气工程学院,吉林 吉林 132012)
随着有效的远程能源传输、可再生资源的整合和可靠的电力供应需求的不断增长,直流系统在现代电力系统中的地位越来越重要.而限制直流系统发展的一个主要难题是直流故障的快速切除.因此研制一种可靠、快速、低损耗和经济高效的直流断路器(Direct Current Circuit Breakers,DCCB)至关重要[1-6].
目前研究的直流断路器主要有三种技术方案:固态式直流断路器、混合式直流断路器和机械式直流断路器[7-8].固态式直流断路器开断速度快,已有较多文献对其进行了研究,文献[9]所提固态式直流断路器利用电力电子开关可以实现快速分断直流电流.但固态式直流断路器应用于高压直流电网时,需要大量的电力电子器件进行串并联,带来了较大的通态运行损耗以及制造成本[10].混合式直流断路器结合了固态开关器件的快速开断能力和机械开关单元的载流能力[11],国内外关于混合式直流断路器的研究文献也很多,ABB公司于2012研制出了世界上第一台开断能力为9 kA的混合式直流断路器样机,南方电网科学研究院在2014年研制出了开断能力为16 kA的样机.但混合式直流断路器存在元件多、控制复杂、造价高这些问题[12].机械式直流断路器具有结构简单、运行损耗低、可靠性高等优势,因此受到很多研究者的青睐[13-14].
目前机械式直流断路器主要依靠主开断支路中的机械开关开断直流电流,但机械开关难以直接开断故障电流,其主要原因是:在短时间内开断一个很大的故障电流,过大的di/dt造成电路承受过电压,由于机械开关在开断初期动静触头的开距未拉到足以承受作用在机械开关两端的电压,会导致机械开关起弧,无法完成直流分断.自激型机械式直流断路器利用电弧的负阻特性迫使无源LC振荡支路产生振荡电流向主开断支路注入反向电流,使主开断支路中的电弧在电流零点熄灭,但分断时间长,不能满足高压直流输电系统的要求[15].文献[16]介绍了一种开断时间长达15 ms的自激型机械式直流断路器,因为直流系统阻尼较小,发生短路故障时电流上升速度很快,为防止非故障线路换流器闭锁,所以直流断路器的开断时间必须在5 ms内[17-18].为了减少开断时间,文献[19]采取有源注入方法为主开断支路人为创造过零点,预充电的电容C与同支路的电感L发生串联谐振向主开断支路注入反向电流使机械真空开关中的电弧在电流零点可靠熄灭,较自激型机械式直流断路器来说所用开断时间有所减少,但其在对机械真空开关进行建模时把它作为一个闭合时电阻为0.1 mΩ、打开时电阻为1E 10 Ω的电阻开关,在真空开关起弧过程中真空开关按闭合状态处理电阻一直为0.1 mΩ,然而实际上电弧电阻是一个可变电阻,所以这样对机械真空开关建模不能准确地反映真空开关燃弧过程中电弧电压、电弧电流以及电弧电阻的变化过程.
针对以上直流断路器面临的问题,本文首先给出了真空开关起弧判据及电弧可靠熄灭条件,并在此基础上提出了一种基于RC支路主动补偿的新型直流断路器拓扑方案,介绍了该拓扑的工作原理,给出了RC支路参数设计方案,通过搭建电弧模型对燃弧过程进行了分析并通过单端中压系统仿真验证了该拓扑方案的可行性.
1 真空开关起弧判据与电弧可靠熄灭条件
设真空开关的耐受电压为Ud,真空开关开断过程中承受电压为Us,其中Ud与触头开距d有关,其表达式为
Ud(t)=k2d(t)a,
(1)
公式中:k2为常数,其数值由试验确定;d(t)为真空开关的触头开距随时间变化的函数;a为常数,取值范围为0.5~1[20].
以真空开关开距形成的介质强度与开关承受电压大小关系作为电弧产生判据:
(1)当Ud>Us,开断过程不产生电弧,如图1(a);
(2)当Ud 起弧后电弧可靠熄灭条件: 使电弧电流出现过零点,且电弧电流过零以后Ud>Us,如图1(b)如果在t1时刻电弧电流出现过零点使电弧熄灭,则t1时刻以后电弧不再重燃. 基于RC支路主动补偿的新型DCCB拓扑结构主要由主支路、RC辅助支路以及能量吸收支路并联构成,如图2所示. 主支路由快速真空开关S构成;RC辅助支路由预充电电容C、电阻R以及晶闸管组成;能量吸收支路由负责限制断路器两端电压并且吸收断路器分断后系统残余能量的氧化锌避雷器(MOV)组成. 在断路器电源侧增设了限流电感L以及辅助断路器BCB,L用于限制短路电流上升速度,BCB则实现电气隔离.同时在RC支路与地面之间增设了预充电电阻RX. 为说明本文所提拓扑结构的工作原理,以下将分为正常运行时、发生短路故障时两种情况进行详细说明. 正常运行时,S处于闭合状态,晶闸管处于关断状态,电流流经主支路,通态损耗小,同时电容将被直流电源充电至直流母线电压UDC. 发生短路故障时(以图2电流I所示方向为例),假设t0时刻发生短路故障,流过主支路的电流上升,但由于限流电感L的作用,短路电流上升速度得到抑制.控制单元监测到短路故障,立即给快速真空开关S的电磁斥力机构发送分闸命令,经过一定的延迟后S触头开始打开,S起弧至t1时刻真空开关的动静触头达到安全开距,控制单元给晶闸管发送触发导通信号,晶闸管触发导通,预充电电容C会立刻产生一个很大的反向电流注入真空开关所在主支路,形成电弧过零熄灭条件,主支路电流转移到RC支路.电容器C经历一个放电再反向充电过程,随着电容电压的增加,主支路两端电压也在增加.t2时刻,主支路两端电压升高至MOV的保护电压,MOV开始动作.系统电流开始从RC支路转移到MOV支路.t2-t3时段电流从RC支路逐渐转移到MOV支路.t3时刻,电流全部转移到MOV支路,此时,流过晶闸管和RC的电流降为零,RC支路实现自然分断.t4时刻,随着MOV的切断,系统总电流降为零,BCB打开完成整个分断过程. 由于RC辅助支路中的电阻R和电容C的大小直接影响着DCCB的分断性能.因此在对这两个参数进行设计时需考虑以下要求: (1)保证电弧可靠熄灭; (2)保证开断时间在规定时间范围内. 因为电阻R的大小直接决定了反向电流瞬时值的大小,为了保证电弧电流过零熄弧,电阻R不能超过一定值. 直流系统发生短路故障时,由于故障回路内等值电感Ldc的存在,短路电流近似以恒定的斜率上升.忽略故障回路内等值电阻,短路电流上升阶段直流电流I(t)的表达式为 (2) 公式中:Vdc为直流电源电压;IN为正常运行时,系统额定电流. 晶闸管触发导通时,为了使电弧电流出现过零点熄弧,反向电流瞬时值Ic0在考虑km倍裕量条件下,其约束条件为 (3) 公式中:t1-t0为从发生短路故障到晶闸管导通所用的时间. 由于燃弧期间电弧电阻很小,对Ic0数值影响不大,故得Ic0数值为 (4) 由公式(4)可知Ic0只受制于电阻R,故得R的约束条件为 (5) 电容C的取值不仅影响真空开关S两端所承受的电压大小,还影响电容放电和反向充电的时间.因此为了保证电弧熄灭后不再重燃,同时保证DCCB开断时间(DCCB的开断时间定义为从直流断路器接收到开断指令到系统电流开始下降的时间)在5 ms内,电容C的取值应满足一定的约束条件. 电容C放电再反向充电过程中,真空开关S两端承受的电压Us(t)求取过程如下: 电弧熄灭后,C继续放电至零,此时系统电路等效为系统电源串联Ldc、R、C的二阶电路,电容电压Uc方向取左正右负方向,所以系统等效电路方程为 (6) 公式中:Uc(0)=-Vdc为初始条件. (7) 公式中:δ为衰减系数,其大小为 δ=R/2Ldc ; (8) ω为衰减振荡频率,其大小为 (9) I1为电流从主支路转移到RC支路瞬间直流电流值,其大小为 (10) 放电过程中RC支路电流大小为 (11) 放电过程中S两端承受的电压为 (12) 为了保证C放电过程中电弧不会重燃,此过程中S的耐受电压应大于其两端承受的电压模值,故电容C需满足以下约束条件为 (13) 当C放电至零后开始反向充电,电容C反向充电过程与放电过程类似,在断路器两端电压达到MOV动作电压前,系统等效电路方程仍为公式(6),因此关于反向充电过程中真空开关两端所承受电压的求取过程不再详细叙述.为保证此过程中电弧不会重燃,真空开关S在此过程中的耐受电压同样也得高于其两端承受的电压. 当断路器两端电压达到MOV动作电压时,MOV动作,电流开始由RC支路向MOV支路转移,MOV 支路电流上升率受电容C取值的影响,C取值越大,MOV支路电流上升率越低,真空开关S两端承受的电压越低,同时C取值越大,C放电及反向充电过程所用时间越长,进而导致新型DCCB开断时间越长.因此在保证新型DCCB开断时间在5ms内,同时保证真空开关耐受电压大于其两端承受电压的前提下,C取值越大越好. 为了验证本文所提拓扑结构的可行性和参数取值的正确性,在Matlab/Simulink中搭建一个典型的单端中压直流系统简化模型.仿真系统结构图如图3所示,在t=0.3 s时,闭合开关SW模拟短路故障.仿真系统参数详见表1. 表1 仿真系统参数 真空开关S经过固有分闸延迟时间开始分闸时,由于此刻真空开关的触头开距未拉到足够的开距以承受其两端的电压,所以真空开关会起弧.为了清楚地了解起弧过程中电弧电压、电弧电流以及电弧电阻的变化过程,需搭建合适的电弧模型进行研究. 图3 仿真系统图4 Mayr电弧模型 Mayr电弧模型适用于采用辅助支路来产生人工过零点的直流断路器的仿真研究中[21].因此本文选择搭建Mayr电弧模型以对燃弧过程进行研究. 利用Simulink搭建的Mayr电弧模型,如图4所示.其中微分编辑器DEE编入Mayr电弧模型的微分方程为 (14) 公式中:g为电弧电导;u为电弧电压;i为电弧电流;f为电弧时间常数;P为电弧散热功率. 对于Mayr电弧模型的三个常数f、P及电弧电导初始值g0,本文选取了一组典型值:f=0.5×10-3s,P=2.9×105W,g0=104S[22]. 为了验证本文所提拓扑结构的可行性以及参数设计方法的正确性,本文给出了基于RC支路主动补偿的新型直流断路器的仿真波形包括新型DCCB内部电流仿真波形如图5所示、电弧电流和电阻仿真波形如图6所示、真空开关S两端电压及其耐受电压仿真波形如图7所示. t=0.3 s时,负载侧发生短路故障,由于限流电感的存在,短路电流以0.86 kA/ms的速率上升. 经过2 ms的故障检测与判别时间,新型DCCB在t=0.302 s时收到分闸指令. 经过0.5 ms分闸延迟时间,t=0.302 5 s时新型DCCB开始分闸.由于S的动静触头未拉到足够的开距以承受S两端的电压,所以S会起弧至真空开关的开距达到安全开距. t=0.303 s时,真空开关的开距达到安全开距,晶闸管导通,Ic注入主支路,由图6(a)可以看出S中的电弧在电流零点熄灭. 电弧熄灭后,由图7可以看出电弧熄灭后S的耐受电压Ud一直高于其两端所承受的电压Us的模值,所以电弧不会重燃. t=0.303 3 s时主支路两端电压达到MOV动作电压MOV开始动作,直流电流I开始下降,由图5可知t=0.308 57 s时,直流电流I降为零. 由图5、图6以及图7的仿真波形可以看出,在分断过程中真空开关中的电弧被可靠熄灭同时断路器的开断时间为1.3 ms,证明了新型DCCB拓扑结构的可行性. 由图6(b)可知t=0.302 5 s~t=0.303 s这段燃弧时间内电弧电阻呈现正增长趋势,但其数值很小所以在计算反向电流瞬时值Ic0时,电弧电阻可以忽略不计.从图5可以看出Ic0为6.67 kA大于此刻直流电流I的1.5倍,证明了本文所提出的参数设计方法的正确性. 图7中S耐受电压波形是根据文献[23]所提供的快速真空开关开距与时间的仿真数据然后由公式(1)求得不同时刻的Ud值进而得出Ud随时间变化的波形.由图7可知t=0.303 s时快速真空开关S熄弧瞬间S两端的电压模值为10.01 kV,此时S的耐受电压为26.29 kV.同时在0.303 s以后Ud一直高于Us的模值,进一步证明了参数设计方法的正确性. 本文从保证电弧可靠熄灭以及改善真空开关两端所承受电压的角度提出了一种基于RC支路主动补偿的新型直流断路器拓扑结构.该拓扑结构具备以下特点: (1)通过投入RC辅助支路为主支路注入反向补偿电流,使主支路电流过零熄弧,同时通过选择电阻R和电容C的参数大小,改善真空开关两端承受电压的大小,使得电弧熄灭后真空开关两端承受的电压低于其耐受电压,进而保证电弧不重燃. (2)RC辅助支路在C反向充电过程中,可以看作一个缓冲限压支路,能有效降低MOV动作初期产生的电压尖峰; (3)仿真结果显示开断时间为1.3 ms,具有快速开断直流电流的能力. 本文还介绍了所提直流断路器拓扑结构的工作原理,并且给出了RC辅助支路参数设计方法,最后通过搭建Mayr电弧模型仿真分析了燃弧阶段电弧特性,同时搭建单端中压直流系统仿真模型,验证了所提拓扑结构的有效性以及参数取值的正确性.2 基于RC支路主动补偿的新型DCCB拓扑结构及其工作原理
2.1 拓扑结构
2.2 工作原理
3 基于RC支路主动补偿的新型直流断路器RC辅助支路参数
3.1 电阻R的设计
3.2 电容C的设计


4 仿真分析
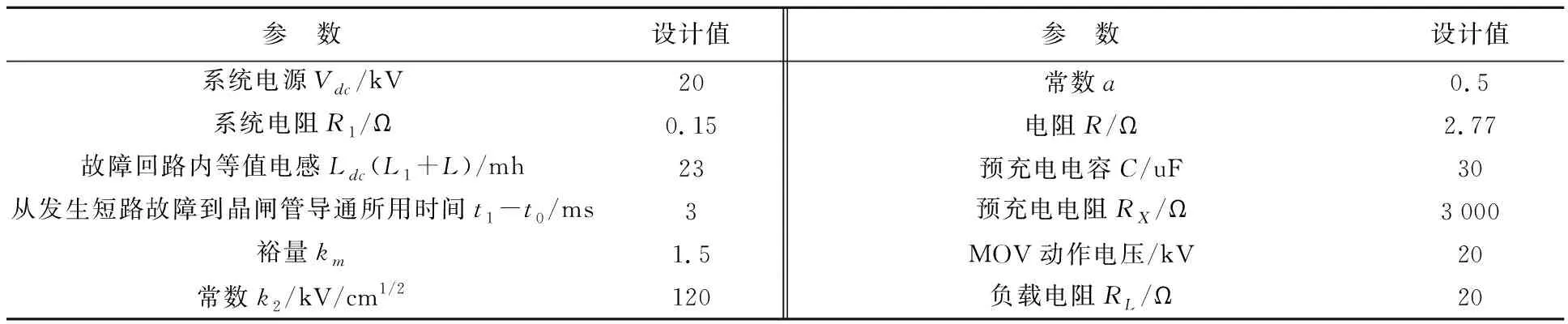
4.1 单端中压直流系统仿真模型及参数

4.2 基于RC支路主动补偿的新型DCCB仿真波形
5 结 论
