UWB技术下隧道施工人员定位系统的精细研究
2020-12-28辛镇泳
辛镇泳

摘要:隧道施工安全问题是当前全民关注的重点问题,特别是施工人员位置信息问题。在隧道实际施工现场中,由于遮挡、环境嘈杂等问题,导致测量信号受阻,无法对施工人员位置进行准确定位,期间,如果发生事故,对隧道被困人员的具体位置和数量不能及时做出判断,导致后果不堪设想。文章以某高速公路隧道定位系统为例设计实验,分别对文中所提的方法进行比较和优化,选择更加精确的计算方法,并将其运用至今隧道施工建设中。
关键词:UWB(超宽带);三边算法;质心算法
引言
社会经济的全球化发展,促使交通建设力度逐渐加强,尤其是对铁路和高速公路新建里程长度的规划。在铁路以及高速公路的修建过程中,对于山地、高原、山岭等地形,可通过修建隧道来实现道路畅通。隧道工程与采矿作业在技术负责程度、作业周期长、作业空间有限以及隐蔽性等方面非常相似,再加之地质变化特点,无形之中为隧道作业带来了一定难度,同时,也给施工人员带来了极大的安全隐患。因每个项目开展都存在周期限制,所以在隧道建设中,要尽量避免事故发生来影响作业进度。为了保护施工人员生命安全,将UWB定位技术运用是隧道建设中,以此来对隧道人员实施精确定位,充分满足项目工程建设的需求。
1超宽带定位技术
超宽带定位技术所使用的宽带>500MHz,且信号也>0.2,该技术利用宽带特性,实现脉冲无线点的精确测距。通过UWB系统所发射的窄脉冲空间占比小,持续时间短,导致多径信号在时间上可分离。除此以外,UWB系统自带的频带较宽,所以信道容量C在一定范围内,可有效降低信噪比,凸显了该系统自身具有较强的抗干扰性。
2设计定位系统
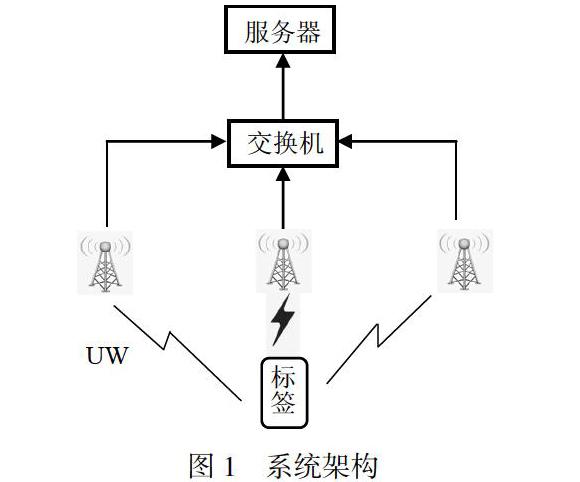
图1为定位系统的构架图,明确了该系统主要的组成部分,其中包括服务器、交换机、定位标签以及参考节点等。
2.1 定位标签
定位标签的主要作用是通过发射的无线信号,对参考节点和标签之间的距离进行准确测量,其主要组成部分是电池供电模块、定位芯片和主控制器。
2.2 参考节点
参考节点主要有四部分组成,分别是网口模块、供电模块、定位芯片以及主控制器[1]。USART接口数据交换的实现,主要是通过主控制器和定位芯片;而对于收集数据的保存和处理均由网口模块和路由器来操作。参考节点即定位参考节点,主要作用是通过定位标签发射的无线电信号,获取其到达节点的时间,以此来对两者之间的距离进行计算。
2.3 交换机与服务器
交换机是通过有线或无线的传输方式,将参考节点汇集的信息进行传递。服务器则将其输送的信息进行分类、处理,并将整理后的数据以二维坐标的形式进行二维动态展示,此时所显示的位置则为准确的隧道施工人员位置。
3定位算法
3.1 三边定位法
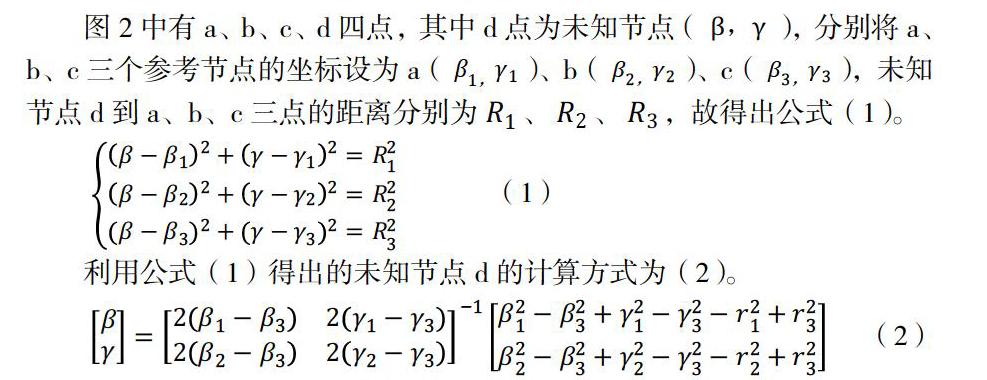
三边定位法是对未知节点求解的过程,具体计算方法是通过参考节点与未知节点之间的距离罗列关系式,对未知节点坐标的计算过程。关于未知节点坐标位置计算的原理图见图2所示。
图2中有a、b、c、d四点,其中d点为未知节点(β,γ),分别将a、b、c三个参考节点的坐标设为a(β_(1,) γ_1)、b(β_(2,) γ_2)、c(β_(3,) γ_3),未知节点d到a、b、c三点的距离分别为R_1、R_2、R_3,故得出公式(1)。
{((β-β_1 )^2+(γ-γ_1 )^2=R_1^2@(β-β_2 )^2+(γ-γ_2 )^2=R_2^2@(β-β_3 )^2+(γ-γ_3 )^2=R_3^2 )┤ (1)
利用公式(1)得出的未知节点d的计算方式为(2)。
[(β@γ)]=[(2(β_1-β_3 )&2(γ_1-γ_3 )@2(β_2-β_3 )&2(γ_2-γ_3 ) )]^(-1) [(β_1^2-β_3^2+γ_1^2-γ_3^2-r_1^2+r_3^2@β_2^2-β_3^2+γ_2^2-γ_3^2-r_2^2+r_3^2 )] (2)
3.2 質心算法
质心算法是利用节点之间的相互通信,对其通信路径进行规划,构成多变形区域,该区域的中心可作用定位节点的预估位置,详情见图3[2]。
图3质心算法的原理
通过质心算法构成多边图形,可称之为几何图形。因个参考节点坐标的平均值由定位节点质心坐标构成,若此时的几何图形有n个参考节点时,其坐标为(β_1,γ_1 )、(β_2,γ_2 )、…、(β_n,γ_n ),那么质心坐标的计算公式则为(3)。(β,γ)=((β_1+β_2+…+β_n)/n,(γ_1+γ_2+…+γ_n)/n) (3)质心算法的运用对定位节点和参考节点两者之间的配合没有具体要求,而且计算方式相对简单,主要是借助网络连通性能来实现。但此计算方式通过都是以辅助形式出现,主要原因是对于位置定位的精确度不够高[3]。
3.3 算法融合
在隧道建设实际施工过程中,对于施工人员位置的测量,因受噪音、遮挡及施工环境的影响,测量信号会有一定程度的减弱,产生测量误差,造成测量时间的延误。图4所示的为三边质心方法的融合图。
将图4中融合算法交互区域中心位置作为d未知节点坐标(β,γ),其他e、f、g三个参考节点坐标分别为e(β_(1,) γ_1)、f(β_(2,) γ_2)、g(β_(3,) γ_3),那么对于d坐标的计算方式为:
(β,γ)=((β_4+β_5+β_6)/3,(γ_4+γ_5+γ_6)/3) (4)
3.4仿真结果
为了对文中所提方法的定位精准度进行验证,将某高速路段内宽15米,长25米的三车道单向隧道为实验场地,然后将参考节点分别放置于该实验区域的四个角,以此来验证计算方法的可实现性。
随机设置50个坐标节点,并将其分布纸在实验区域内,通过运用三边算法和融合算法来对定位节点进行计算,对实际节点和计算节点计算存在的误差相比较。通过两种方法的平均定位误差来看,三边算法定位误差在0.119m左右,而融合算法的平均定位误差在0.62左右,位置定位精度提高了一倍[4]。根据评价定位误差值充分体现了融合算法优势,在未来对隧道施工人员的定位方面提供有力支持。
4 结语
为了使隧道施工人员安全得以有力保障,全文对位置定位方法的精准度进行了验证,得出三边定位与质心的融合算法最符合现在对系统精准定位的需求。该融合方式精准度的有效提升,可以是隧道建设项目操作人员对内部施工人员的具体位置掌握更加准确,并且在风险规避和灾后救援方面也有了一定安全保障,为今后隧道建设奠定了扎实基础。
参考文献
[1]叶思言,张永宁,李锦,张炼科,周玉,郑美芳,张松.基于UWB定位和OpenMV识别的智能跟随行李箱设计[J].成都工业学院学报,2020,23(03):29-33.
[2]徐建,姚红亮,王伯恩.UWB定位系统在供电作业安全管控中的应用[J].大众用电,2020,35(09):41-42.
[3]何永胜,梁雨林,康朋,周茂,陈进.基于UWB技术的施工人员目标检测与跟踪定位系统的研究[J].电子设计工程,2020,28(03):23-26+31.
[4]金珊,马健,李嘉慧.基于UWB室内定位技术的展厅物理环境与观展行为的时空数据关联研究——以深圳某高校改扩建展厅为例[J].住区,2020(04):114-119.
