一种新型的电缆隧道巡检机器人研制
2020-12-28张小军付豪张博庄文兵
张小军 付豪 张博 庄文兵


摘要:隧道电缆的稳定运行直接关系到地下供电网络与各级变电站的安全性与可靠性。电缆沟道智能巡检机器人研究,是一种基于集成检测和自动控制技术的巡检装置,该装置配置的温湿度传感器、热成像仪、摄像机、微波探伤仪和电源模块等能实现对电缆沟道的温湿度、热分布、空间成像、设备物理缺陷等情况的实时监控,能代替人工高效率高质量的巡检,及时发现电缆沟内的各种安全隐患,防患于未然。
关键词:智能巡检;自动控制;传感器;电源;电缆沟
中图分类号:TM835文献标识码:A
DevelopmentofANewTypeofCableTunnelRoutingInspectionRobot
ZhangXiaojun1,FuHao2,ZhangBo2,ZhuangWenBing1
(1.ElectricPowerResearchInstitute,StateGridXinjiangElectricPowerCompany,Urumqi830011,
XinjaingUygurAutonomousRegion,China;
2.StateGridXinjiangElectricPowerCompany,Urumqi830011,XinjaingUygurAutonomousRegion,China)
Abstract:Thesafeandstableoperationofthetunnelcableisdirectlyrelatedtothesafeanstableoperationoftheundergroundpowersupplynetworkandsubstationsatalllevels.Researchoncablechannelintelligenttransportationinspectionrobotsaimtosupplyanewmethodforcablechannelinspection.Thecablechannelintelligenttransportationinspectionrobotsisakindoftechnologybasedonintegrateddetectionandautomaticcontroltechnologiesincludingtemperature&humiditysensor,thermalimager,camera,microwaveflawdetectorandpowermoduleetc.Byethedevice,temperature,humidity,heatdistributionandspaceofthecablechannelcanbemonitoredreal-timely.Real-timemonitoringofimagingandequipmentphysicaldefectscanreplaceartificialhigh-efficiencyandhigh-qualityinspectionsandtimelydiscovervarioussafetyhazardsincabletrenchestopreventproblemsbeforetheyoccur.
Keywords:intelligentinspection;automaticcontrol;sensor;powersupply;cabletunnel
0引言
越來越多的城市或人口密集区采用地下电缆输配电方式取代架空输电线路,成为城市电网的重要组成部分。与其相应的,变电站的隧道管网总长度与日俱增。故此,隧道电缆的稳定运行直接关系到地下供电网络与各级变电站的安全性与可靠性。在环境相对复杂的隧道中,电缆长期运行,时常出现老化、断股、磨损、腐蚀或小动物噬咬等问题,加之隧道环境恶劣,常年沉积有易燃有毒气体,如不及时采取措施,极有可能酿成火灾爆炸事故,损失惨重。所以,必须对隧道中的电缆定期检查维护,随时了解电缆运行情况及其周围环境,及时发现并消除隐患,确保供电安全。
传统的人工工作方式缺陷明显。劳动强度大、作业效率低、作业质量不稳定,存在严重的人身安全隐患,已经越来越适应不了现代社会的发展需要。随着机器人技术日趋成熟,智能机器人设备将会成为智能电网的重要组成部分,对电网供电能力和供电质量提出更高的要求。
1国内网研究水平综述
美国、日本等发达国家先后开展了地上巡检机器人的研究工作,并取得了阶段性的成果。进入21世纪,随着城市地下配电网络的普及,美国率先完成原理样机的开发工作。但是也存在一些缺点与不足,如连续工作时间较短,只能维持1小时左右;远程主机与机器人之间无线通信的允许最大距离(十米之内)较短,当机器人大部分电子器件暴露在外,防水性能较差,当其工作在滴水现象发生的隧道中,会对机器人的正常运行产生极大的影响,甚至无法完成电缆检测工作。
我国城市地下配电网的快速发展并完善给电缆巡检机器人的研制带来了发展机遇,从理论研究到原理样机的研制都取得了丰硕的成果。上海市电力公司2009年设计出了一种小型电缆隧道检测机器人。但是该机器人体积仍然较大,无法满足小型电缆管道的巡检任务。
2012年由杭州市电力局研发的电缆隧道巡检智能机器人具有自主巡检、突发事件处理、远程监控功能,续航能力长达4小时,配有高清可见光和红外摄像机、有害气体检测装置,可实现对隧道内电缆形变、温度及有害气体的监测。但是,该机器人采用轮式移动结构,越障能力较差,只能在大型的地面相对平缓的电缆隧道中进行工作。
目前,针对机器人用于地下电缆管道作业与电缆检测,国内外研究并不多见,比较典型的有上海电力公司小型电缆隧道检测机器人,上海交大电缆管道机器人,巴西南里奥格兰德联邦大学的TATUBOT机器人。但以上地下电缆机器人功能较为单一,如仅针对电缆隧道内综合检测、仅用于管道疏通或施工验收、仅用于管内电缆状态检测。
适用于电缆隧道巡检的机器人还处于原理样机阶段,当前时期在高机动性载体、复杂环境越障、环境探测、通讯、远程控制、系统可靠性设计等方面都需要针对电缆隧道情况,进行深入细致的研究,以达到实际应用的水平。
2总体设计
开发一套人机界面,可以显示电缆温度数据、隧道内实时图像、隧道内气体种类和浓度、云台运行情况、各电机状态、报警等信息。装置的工作参数可以反馈传输到检修人员手机。通过遥控手柄和手机APP控制装置的运行状态。
装置的工作参数可以反馈传输到检修人员手机,通过遥控手柄和APP控制装置的运行状态。上位机软件使用C#编写,具有友好美观的人机交互界面,其主要功能有:1、控制探测头的开闭或移动;2、控制巡检机器人的移动;3、控制探测头托架的动作;4、串口与下位机通信;5、紧急停止等。
2.1机器人组成框架图
该机器人包括控制系统、运动执行机构、气体检测装置、电缆检测装置、导航定位装置、通讯装置、电源管理系统。移动体组成部分框图如图所示。该巡检系统包括机器人(移动体)、通讯网络、远程终端三部分组成。
2.2运动控制
分析电缆隧道机器人的工作状况,需要机器人完成低速向前运动,左右原地转向,能适应斜坡地面。为满足以上要求,设计采用四驱轮式结构,用全桥电机驱动模块控制直流减速电机,实现电机低速正反转。直流减速电机自带减速箱,转速低扭矩大,很适合电缆隧道机器人。
2.3定位装置
隧道内部路口较多,要完成各个路段的巡检工作,需要设定好机器人的行进路线。如果机器人有“认路”功能,那么隧道遍历工作就可以顺利完成。联想到公路路口设置的道路指示牌,如果在隧道内部各路口处也设置“路牌”,那么机器人就可以参考“路牌”,对自身定位。然而公路路牌是文字,机器人较难实现识字功能。此处,我们使用射频卡充当“路牌”,使用射频卡读卡装置充当机器人的“眼睛”。
2.4温湿度及气体含量传感器
气体检测装置含多种空气质量传感器,有:硫化氢传感器,一氧化碳传感器,氢气传感器,温湿度传感器,烟雾传感器,甲烷传感器等。使用的气体含量传感器均输出模拟电压量,其电压值正比于检测的气体含量。气体传感器将模拟量转化为数字量。需要进行ADC转化的传感器较多。
温濕度传感器DHT11器件采用简化的单总线通信。单总线即只有一根数据线,系统中的数据交换、控制均由单总线完成。设备(主机或从机)通过一个漏极开路或三态端口连至该数据线,以允许设备在不发送数据时能够释放总线,而让其它设备使用总线。
3实施方案
3.1行走动力装置
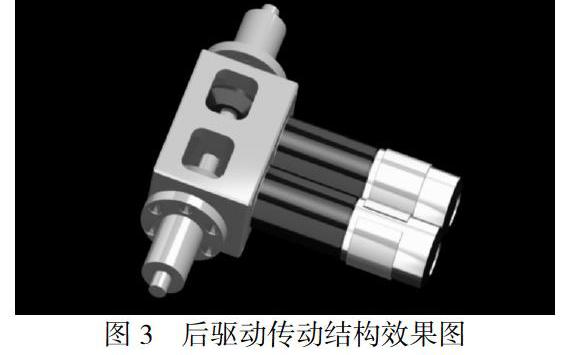
为了巡检机器人适应复杂的电缆隧道环境,选用双履带式结构。履带上设计有凸起的等间距分布的橡胶结构,进一步增加了机器人的越障能力和环境适应能力。机器人的驱动力来源与机体后方下部的两个直流减速电机,电机通过两对锥齿轮改变扭矩方向,将动力分别传递到左右后轮上,而后轮作为驱动轮,带动整个履带的运动和其他辅轮的转动。
整个装置的基座部分采用强度高、密度小的铝合金,使得机器人整体重量大大减少,也不会影响其使用寿命,且便于加工,并且重量的减小又进一步提高电机的效率,后驱动轮的扭矩进一步增大,使得机器人的越障能力、环境适应能力进一步提高。
3.2探测云台升降与旋转装置
云台的升降机构依靠调节中心丝杠的收缩量实现装置的升降功能,两对悬臂两端分别连接云台与基座,共同构成一个稳定的四连杆机构。而丝杠与靠近基座的一对悬臂又形成一个三连杆机构。丝杠末端装有一组电机,传动引入丝杠螺母,通过无线遥控器控制电机的转动,使得丝杠螺母旋转,丝杠收缩,使得三连杆机构的丝杠部分变短。
云台的旋转机构依靠云台内后方的舵机的正逆旋转实现云台镜头部分的左右旋转,整个镜头部分由内外两层弧形结构组成。内层为正常半圆弧结构,而外层由半圆弧和平直挡板组成,挡板部分无弧度,这就在机械的层面上解决了云台镜头的旋转边界阈值问题。
3.3检测装置
检测装置由气体检测与电缆信息检测组成,气体检测有温湿度传感器和气体含量传感器,而对于电缆信息的监测则依靠电缆图像的采集和电缆温度的测量来完成。
气体检测装置中的温湿度传感器DHT11器件采用简化的单总线通信,当DHT11模块收到单片机呼叫时,其返回的数据是上一次呼叫时测量的温湿度结果,而当次呼叫测量的数据将于收到下一次呼叫时发送出去。考虑到隧道内部比较封闭,温湿度不会突变,设置3秒的呼叫时间间隔是可以接受的。
使用的气体含量传感器均输出模拟电压量,设置转换结果位数为12位,则转换结果取值范围在0~4095之间。ADC最大识别电压为3.3V,即可以分辨out引脚在许用电压范围内0.8mV的电压变化。测试结果显示,这个精度是可以满足需要的。使用者可以根据需要设置转换结果为10或16位,选用位数可视实际情况而定。
对于电缆信息的图像采集,采用CMOS摄像头器件,分辨率可以达到640×480,传输速率可以达到30帧,能够满足图像采集系统的要求。OV7620的控制采用SCCB(SeriaICameraControlBus)协议。SCCB是简化的I2C协议,SIO.l是串行时钟输入线,SIO.O是串行双向数据线,分别相当于I2C协议的SCL和SDA。
而最重要的温度信息的采集,采用红外非接触温度计。传感器的探测视场是一个夹角平面。传感器测量的温度为视场里所有物体温度的平均值。运用此特性,可测量隧道中一定面积电缆的整体温度。
4结论
(1)在原有技术基础上,继续研发驱动方案和监测方案采仍然用原来技术方案,控制方案则升级为无线通讯远程遥控控制系统和移动客户端双端控制,可以满足机器人实现变电站电缆沟的巡检功能。
(2)机械越障部分主要采用了履带移动机构,另外为了方便机器人越障,机器人另设计安装了辅助摆臂;双端通讯部分运用了有线通讯与无线通讯的结合通讯方式,极大的提高了机器人的通讯可控范围。
(3)机器人机械越障部分、双端通讯部分、远程控制部分和监控软件部分相互独立却又彼此联系,实现了结构的独立性和工作的连贯性,易于部分维修和协调工作。
(4)电缆沟智能巡检机器人安全可靠,高效便捷,功能完备,可有效预防电缆事故隐患的发生,提高电力自动化水平,加快电网智能化发展,推动电缆沟巡检的无纸化和信息化,切实提高巡检的工作效率和质量,为电网设备的运行管理提供了一种创新型的设备检测和监控手段。
参考文献:
[1]陈兴良,杜秋实,张营,鲁宇.新型电缆沟道智能巡检系统研究[J].黑龙江科技信息,2017,(12):98
[2]姜涛,葛少伟,李德泉等,电缆隧道巡检机器人行走机构的方针研究,自动化与仪器仪表,2018,12
[3]刘冰,张兴永,张卫东等,电缆隧道巡检机器人的设计与实现,电子技术与软件工程,2018,06
[4]赵晖,钱瑞明,新型电缆隧道巡检机器人机构设计与轨道优化仿真,机械设计与制造工程,2018,03
![]()
作者简介:
张小军(1988-),男,本科,工程师,主要从事电力系统分析、电网设备状态监测与评价技术研究,E-mail:523389980@qq.com
