无人机载配网验电系统设计
2020-12-28郑晓军董金水刘鹏吴飞
郑晓军 董金水 刘鹏 吴飞

【摘 要】在高压线路检修过程中,针对普遍存在的安全距离判断不准和违规验电问题,提出一种以无人机为载体的配网验电系统。该系统采用二维云平台控制验电杆的动作和方向,应用多种传感融合技术判断和记录验电过程,设计高绝缘性、可伸缩验电杆系统,结合无人机和无线遥控技术,实现了智能化、安全性高的无人验电过程。
【关键词】验电系统;无人机;多传感器融合;智能化
1 引言
高压验电是保证安全的技术措施之一,是架空配电线路检修工作的第一步,很多线路人身安全事故都是当事人没有判断清楚线路带电情况而导致自身触电[1]。目前系统内线路检修工作都是在登杆后才进行验电,这就导致登杆人员只能通过肉眼判断自己与线路之间的安全距离,而科学分析得出人眼对距离的判断是最不可靠的,极易因为安全距离判断不准而造成触电[2,3]。线路检修作业是在工作负责人收到调度指令具备检修条件后开始安排人员登杆,验电需要登杆到一定的高度后进行,而很多作业人员不愿在登杆的途中停顿下来进行验电,主观认为线路是否带电是经过调度、负责人多重确认过的,中途验电是多余操作,所以大多数检修人员登杆后忽略了验电这一步重要步骤,导致造成触电事故[4,5]。
针对普遍存在的安全距离判断不准和违规验电问题,设计了一种无人机载配网验电系统,该系统采用二维云平台控制验电杆的动作和方向,应用多种传感融合技术判断和记录验电过程,设计高绝缘性、可伸缩验电杆系统,结合无人机和无线遥控技术,实现了智能化、安全性高的无人验电过程。
2 系统结构设计
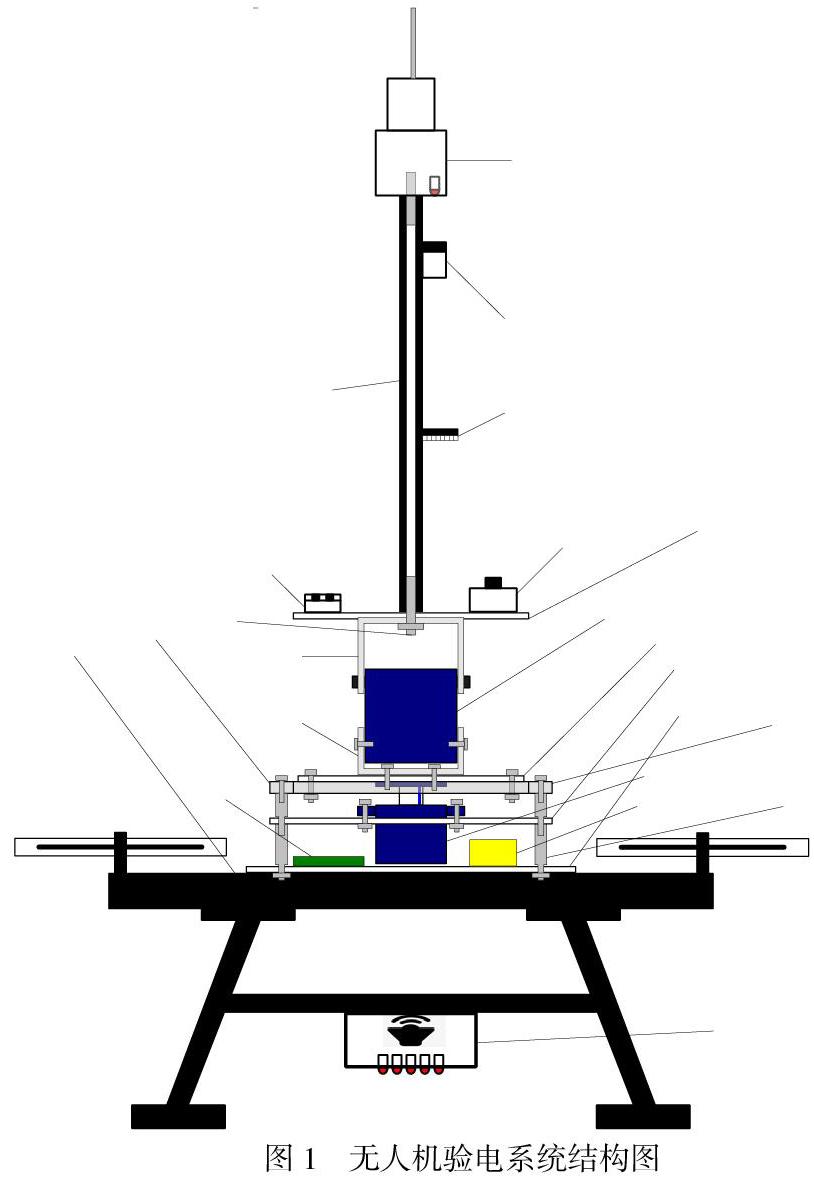
整个系统由无人机、控制云台、验电装置、遥控装置组成,如图1所示。控制云台由轻便的亚克力板搭建,用于安装和固定传感器、舵机、电路板、锂电池。亚克力板之间用尼龙立柱链接和支撑。
亚克力平板1用于固定和支撑整个云台。小扭矩舵机整体由亚克力平板2固定并连接到轴承转盘的外圈,如图2所示。
小扭矩舵机的转轴由连接盘固定在亚克力平板3,亚克力平板3与轴承转盘内圈连接,同时亚克力平板3与大扭矩舵机整体通过支架1连接。这样可以当小扭矩舵机上电转动,带动轴承转盘内圈转动,实现大扭矩舵机整体的旋转运动。
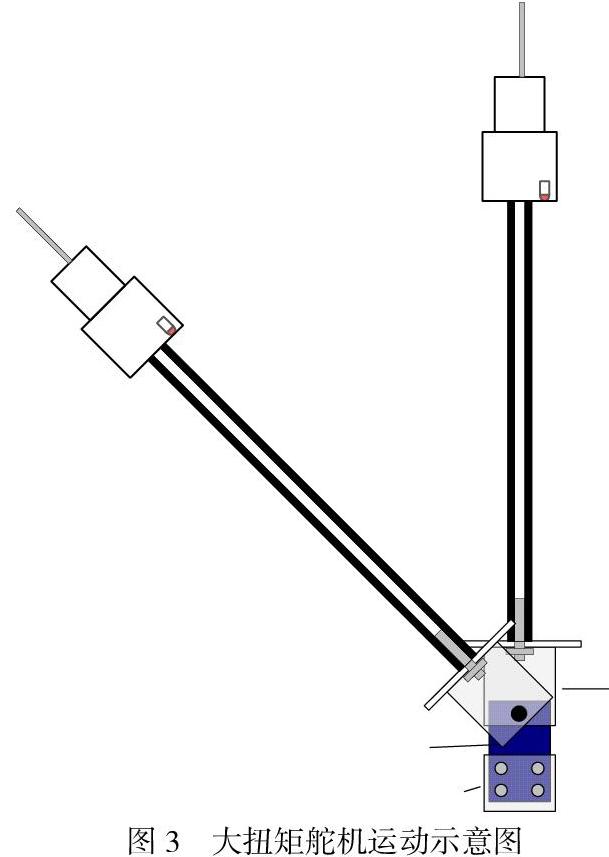
大扭矩舵机的旋转轴通过支架2与亚克力平板4连接,亚克力平板4固定有激光测距传感器和摄像头,环氧树脂杆通过固定螺柱与支架2连接。这样,大扭矩舵机上电转动,带动平板4上安装固定的激光测距传感器,摄像头,环氧树脂杆进行运动,如图3所示。
验电装置由环氧树脂杆和固定在杆上的验电器组成,测距显示屏和激光接收器安装在杆上。激光接收器正对着验电器的红色小灯,测距显示屏正对着摄像头,并保证在摄像头的视野之内。
云台控制系统设计,如图4所示。整个系统由锂电池供电,单片机系统作为控制中心。wifi模块接收到遥控装置的信号发送给单片机系统,单片机系统发送信号给舵机控制器用以控制两个舵机。摄像头将验电装置的图像发送给单片机系统,并由WiFi模塊传输给遥控装置。激光测距传感器用于测量验电环与无人机的距离,将测量信号传输给单片机,并由单片机通过测距显示屏显示。激光接收器用以接收验电器的红色小灯,当红色小灯闪烁,激光接收器将信号传输给单片机系统,并通过单片机控制声光报警器进行报警,声光报警器安装在无人机下方,便于操控人员进行观察。
遥控装置如图5所示。由单片机系统、旋钮电位器、wifi模块、摄像头显示屏、锂电池构成。旋钮电位器输入信号给单片机系统,单片机系统将信号通过wifi模块发送给云台控制系统,用以控制两个舵机的转动角度,云台控制系统通过wifi将摄像头信息发送回遥控装置,通过摄像头显示屏观察验电杆的接触过程,同时视野里显示测距显示屏的距离数字信息。
验电装置系统主要由验电装置和伸缩装置两部分构成。验电装置由验电模块和探测头组成,伸缩装置由环氧树脂验电杆、控制器等部分组成,如图6所示。控制器通过无线通讯模块接收到伸缩命令,控制验电杆伸长和缩短。伸缩装置使得验电装置可以充分接触到电缆上的验电环,验电装置的探测头用以检测验电环是否有电和确认是否接触到电缆,并把相应的信息通过无线通讯模块传输到地面。
验电装置由验电模块和金属探测头组成,验电模块由验电器、接触测量电路和无线通讯模块构成。主要功能:1.验电金属探测头与验电器实现验电环是否有电测量;2.回路金属探测头与验电金属探测头通过绝缘材料隔开和固定,回路金属探测头直接与接触电路相连,验电金属探测头通过导线与接触电路相连,当两个接触头同时与验电环金属部分接触,可以形成一个导电回路,用以确认两个探头是否触碰到验电环。主要工作过程:1.首先,关闭接触测量电路,控制验电装置触碰验电环金属,如果验电器发出信号,说明验电金属探测头充分接触到验电环金属,并确认验电环有电;2.如果验电器未发出信号,则有两种可能:a.验电金属探头未触碰到验电环金属;b.验电金属探头充分触碰到验电环金属,且确认验电环无电。此时,通过无线通讯模块打开接触测量电路,如果接触测量电路有信号,说明已经充分接触,属于b情况,否则属于a情况,然后关闭接触测量电路,重新调整验电装置位置,重复上述过程直到测量结束。
验电杆自动伸缩装置由三段环氧树脂杆、电机、气泵、尼龙绳、控制器组成。为了起到绝缘作用,自动伸缩验电杆采用绝缘材料实现。主要工作过程:1.验电杆采用三段环氧树脂中空密封杆,可以实现收缩,当验电开始时,验电杆保持缩杆状态,控制器通过无线通讯模块接收到地面的伸长命令后,气泵控制单元控制气泵往验电杆里充气,气压推动验电杆的伸长;2.验电结束后,控制器通过无线通讯模块接收到地面的收缩命令后,电机控制单元控制电机带动尼龙绳,尼龙绳固定在验电杆第一段上,电机绞绕尼龙绳,将验电杆进行收缩。
3 结论
该装置的研制代替了传统的人工的爬杆验电,提高了验电工作的安全性和智能化,与其他验电方案相比,具有以下创新:
●采用回路金属探测头与验电金属探测头及接触测量电路构成的回路进行检测验电金属探头是否接触到验电环;
●验电杆使用的材料以及伸缩控制的装置很好的保证了绝缘性。验电杆采用环氧树脂材料;采用气泵方式伸长验电杆;采用电机结合尼龙绳的方式缩短验电杆;充气和尼龙绳都具有很好的绝缘性;
●系统信号的传输采用无线通讯的方式与地面进行信息传递;
●采用双舵机控制云台,实现验电杆的空间位置变化,便于接触验电环;
●采用.激光测距传感器、wifi摄像线、激光接收和声光报警等多传感器融合方法,实现操控者实时观察验电杆的位置状态,用于调节验电杆的姿态,并可实时保存验电器接触验电环的过程。
参考文献:
[1]刘小波,叶宇锋,何小剑.熊铠.一种改进的可升缩验电笔的研究与应用.电工技术. 2020,8:41-42
[2]胡呈祖,黄晖.基于射级跟随的高压验电的实现.电气自动化. 2020,5:67-68,104
[3]刘博迪.新型输电线路无人机验电装置研究.电工技术. 2019,21:130-131
[4]谭毓苗,陈新岗,古亮,杨定坤,马骏,谭昊.基于双轴传感的直流验电系统设计.中国测试. 2017,5:76-81
[5]林伟鹏.新型10kV验电笔启动电压试验装置的研制.机电信息. 2016,33:31-33
作者简介:
郑晓军,1978年出生,大学本科,高级工程师,浙江省电力有限公司江山市供电公司,主要从事电力供应及管理方向的研究。近年来设计研发创新电力成果12余件,累计申报专利30余项,获得6项发明专利授权,省级科研论文4篇,创新成果多次荣获荣获浙江省电力公司科技成果奖项。
(作者单位:1.国网浙江省电力有限公司江山市供电公司;2.衢州学院电气与信息工程学院)
