自走式圆白菜收获机设计研究
2020-12-28胡昀
胡昀


摘 要 圆白菜在我国具有非常大的种植量,传统的圆白菜收获工作主要通过人力来完成,不仅浪费大量资源,还无法有效提高工作效率。自走式圆白菜收获机能够实现圆白菜的自动收获。该设备以液压系统为基础,包含了引拨机构、输送提升机构、切根机构以及剥叶机构,在显著提升圆白菜收获速度的同时,能够确保圆白菜的收获品质。基于此,阐述圆白菜收获机工作原理,并分析传动系统与关键机构的具体设计。
关键词 圆白菜;收获机;设计
中图分类号:S225.51 文献标志码:B DOI:10.19415/j.cnki.1673-890x.2020.29.081
圆白菜是我国普遍种植的蔬菜,总种植面积超过了20万公顷,其年产量位列我国蔬菜种植的第3名[1]。然而,现阶段我国圆白菜收获方式主要是依靠人力劳动来完成,不仅劳动效率低、劳动强度大,也增加了生产成本,不利于圆白菜种植产业的长久发展。尽管目前有一些学者开展了圆白菜自动收获机械设备的研发工作,但是大多是从理论层面进行,没有从实际状况出发,设计出满足各种使用工况的自动化机械设备。伴随着现代社会经济的不断发展,人工成本越来越高,年轻的劳动力通常不愿意从事该项工作。在这样的背景下,加强推广自动化机械成为了圆白菜收获的重要方向,对于圆白菜种植行业的进一步发展有非常重要的作用。基于此,探究自走式圆白菜收获机的工作原理,并对其中的液压系统以及关键机构进行设计,为实现圆白菜自动化收获提供帮助。
1 圆白菜收获机工作原理
自走式圆白菜收获机工作过程中,第一步通过液压控制系统使得收获台机架和地面的夹角为25°左右,确保引拨机构中的引拨部件和地面的夹角为0°,并和地面相接触。收获机在向前运动过程中,引拨机构会对行性不良的圆白菜进行聚拢,然后将其从土壤中拔出。拔出后的圆白菜会进入输送提升机构中,通过输送带将圆白菜运送到切根机构,通过切根机构中的双圆盘割刀将圆白菜的根部切除,切下的根部会直接掉落在田地中,而圆白菜以及外侧包叶会继续沿着输送带进入剥叶机构中,通过叶辊部件的滚动摩擦,使得圆白菜外侧破损的包叶被清除,并将圆白菜送入包装盒中,完成圆白菜的收获工作[2-4]。
2 传动系统与关键机构设计
2.1 传动系统
考虑到自走式圆白菜收获机工作的稳定性,为降低收获机设计与生产难度,须采用液压系统控制。泵站主要依靠收获机驱动机构中的柴油机带动,并在液压系统中设置两组回路,分别为高速回路以及低速回路。其中高速回路主要负责驱动圆盘割刀以及剥叶辊,将圆白菜的根茎以及外周包叶清除掉;低速回路主要负责各个输送带的运动,确保收割的圆白菜能够顺利抵达各个机构中。每个油路上都装配有流量调节阀,在负载出现改变时,流量调节阀能够确保液压马达输出流量不变[5]。
2.2 引拨机构
引拔机构的主要作用是将田地中的圆白菜挖掘出来,并将其引导至输送装置。在实际运行过程中,需要配合收获机的自动行走功能,保持引拔铲平行于地面,使之处于地面与圆白菜之间,在行走中将圆白菜从土壤中拔出来,然后将收获的圆白菜运送到输送提升机构中,在此过程中拔轮的职能是帮助圆白菜顺利喂入[6]。如图1所示为收获机引拔机构图。图中序号1表示为机构固定座、序号2为导向杆、序号3为引拔铲、序号4为叶板、序号5为拔轮、序号6为圆白菜、序号7为传输带、序号8为弹性浮动杆。
2.3 输送提升机构
输送提升机构包含了双螺旋输送式以及横向输送带式两种类型,其中横向输送带式能够有效避免出现挤压破损,保证收获圆白菜的完整性。如图2所示为收获机输送提升机构图。图中序号1为设备固定架、序号2为双圆盘割刀、序号3为夹持输送带、序号4为弹性张紧轮、序号5为距离调整装置、序号6为调节丝杆、序号7为主动轮旋转杆、序号8为主动轮。在进行输送提升机构设计时,要保证输送效率大于收获机的行走效率,保证收获上来的圆白菜能够及时传输出去,避免产生堵塞。
2.4 切根机构
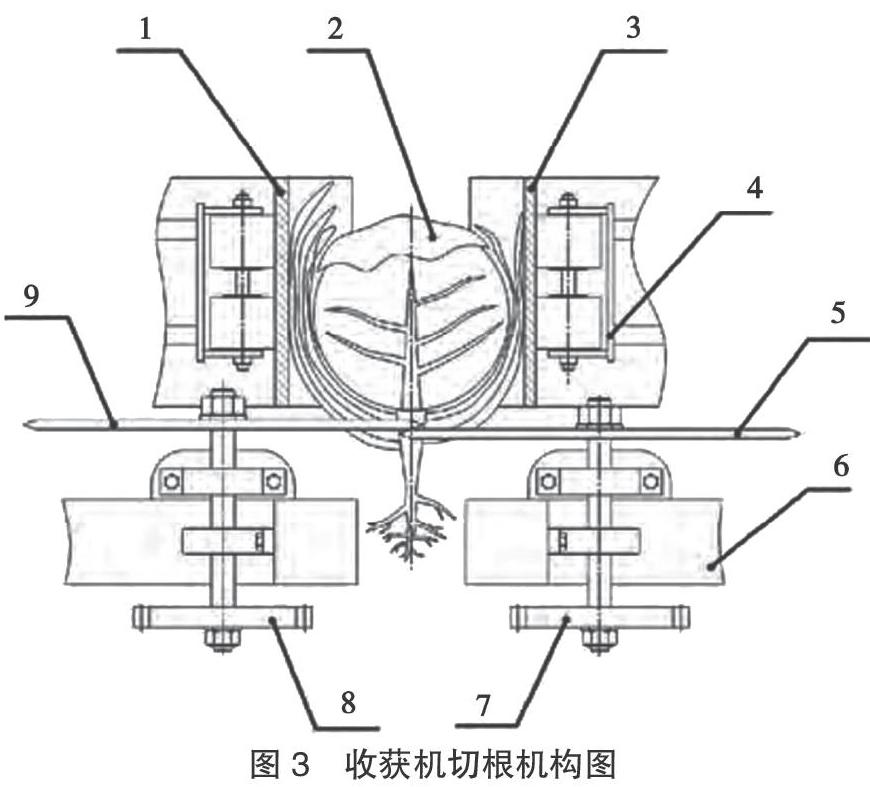
圆白菜收获机切割机构是十分重要的一部分,不仅与输送提升装置相配合,同时切根的效果也会直接影响到后续剥叶的完整性。通常情况下,切根机构主要有单圆盘切割器以及双圆盘切割器两种,但是由于单圆盘切割器需要较高的转速,会产生较大的能源浪费,为此本设计采用双圆盘切割器[7],如图3所示为收获机切根机构图。其中序号1为左夹菜输送带、序号2为圆白菜、序号3为右夹菜输送带、序号4为弹性张紧轮、序号5为右圆盘割刀、序号6为固定架、序号7和8为传动链轮、序号9为左圆盘割刀。
2.5 剥叶机构
收获机切根机构在工作过程中切除圆白菜根部的同时,也会切割到外包叶片的底部,导致一些外包叶片损坏。在传统工作中,主要通过人工方式去除外侧的叶片,而本文设计了一种可以自动剥离圆白菜外包叶子的机构,通过剥叶输送带与剥叶辊相向运动产生的摩擦碰撞来实现,并将剥离好的圆白菜运输到指定位置。
3 结语
自走式圆白菜收获机解决了传统人工收获劳动强度大、工作效率低的问题,是未来圆白菜种植行业自动化发展的重要方向,具有非常高的应用价值,尽管本文中设计的圆白菜收获机能够实现各个功能,但是还需要结合实际应用状况不断优化,保证设备运行的稳定性与高效性。
参考文献:
[1] 李向军.大白菜机械化收获注意事项及研发趋势[J].农机使用与维修,2020(3):2-3.
[2] 姚森,张健飞,肖宏儒,等.甘蓝机械化收获技术研究现状与发展趋势[J].中国农机化学报,2019,40(4):36-42.
[3] 廖禺,陈立才,潘松,等.叶类蔬菜机械化收获技术装备现状与发展[J].江西农业学报,2019,31(11):77-81.
[4] 李小强,王芬娥,郭维俊,等.4YB-Ⅰ型甘蓝收获机提升输送装置的改进与测试[J].甘肃农业大学学报,2013,48(4):159-164.
[5] 张志起,崔中凯,刘继元,等.4YX-4型全液压自走式玉米收获机液压系统设计[J].农机化研究,2015,37(12):97-101.
[6] 王东伟,尚书旗,赵大军,等.4HBL-4型二垄四行半喂入自走式花生联合收获机[J].农业机械学报,2013,44(10):86-92.
[7] 王家勝,尚书旗.自走式双行胡萝卜联合收获机的研制及试验[J].农业工程学报,2012,28(12):38-43.
(责任编辑:赵中正)
