基于初始点Hough变换公园绿篱修剪机器人自动化导航研究
2020-12-28陈继清强虎徐关文吴家华刘旭
陈继清 强虎 徐关文 吴家华 刘旭


摘 要: 針对车载绿篱修剪机难以在公园道路自动行走的问题,在视觉系统的基础上,提出一种初始点Hough变换算法,可用于指导小型车辆在公园道路的自动化导航,从而实现公园绿篱修剪的机械化和智能化。算法主要包括五部分:目标区域的截取、HSI彩色空间的转换、S分量图的二值化及形态学处理、导航点的求取与导航线的拟合。为了减少图像的计算量和干扰,只截取拍摄图像的部分区域作为目标区域;为了减少光照不均匀的影响,将RGB图像转换为HSI图像,并提取S分量图作为研究对象;采用Otsu法二值化S分量图,并采用形态学处理填充二值图像的孔洞;针对传统的Hough变换计算量大的缺点,提出一种初始点Hough变换拟合导航路径。试验结果表明,该文提出的初始点Hough变换具有较高的精确性、实时性的优点。
关键词: 修剪机器人; 自动化导航; 初始点Hough变换; 导航路径; 机器视觉; 形态学运算
中图分类号: TN830.1?34 文献标识码: A 文章编号: 1004?373X(2020)24?0170?04
Research on park hedge trimming robot automatic navigation based on
initial point Hough transform
CHEN Jiqing1,2, QIANG Hu1, XU Guanwen1, WU Jiahua1, LIU Xu1
(1. School of Mechanical Engineering, Guangxi University, Nanning 530007, China;
2. Guangxi Key Laboratory of Manufacturing System and Advanced Manufacturing Technology, Nanning 530007, China)
Abstract: In allusion to the problem that the hedge trimmer is difficult to automatically walk on the park road, an initial point Hough transform algorithm is proposed based on the visual system, which can be used to guide the automatic navigation of small vehicles on park roads, so as to realize the mechanization and intelligence of the park hedge trimming. This algorithm mainly includes five parts: the interception of target area, the transformation of the HSI color space, the binarization and morphological processing of the S component image, the extraction of navigation points and the fitting of navigation paths. Only part of the image is intercepted as the target area to reduce the amount of calculation and interference, the RGB image is converted into the HSI image, and the S component image is extracted as the research object to reduce the effect of uneven lighting. The Otsu method is used to binarize the S component image, and the hole of binary image is filled by morphological processing. As the traditional Hough transform has a large amount of computation, an initial point Hough transform is proposed to fit the navigation path. The experimental results show that the initial point Hough transform proposed in this paper has the advantages of high accuracy and real?time.
Keywords: trimming robot; automatic navigation; initial point Hough transform; navigation path; machine vision; morphological algorithm
0 引 言
3 实验结果与分析
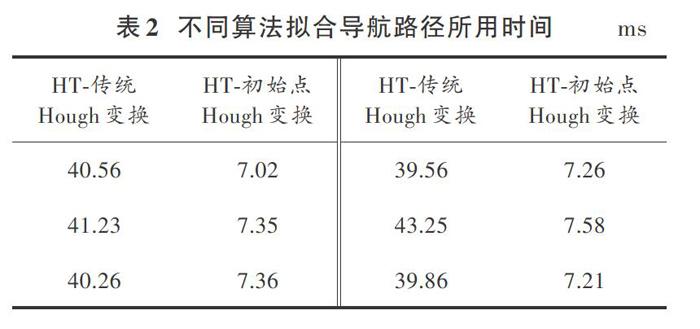
本文选择在南宁公园进行实验,选取植物生长和道路情况较为复杂的1幅图像作为研究对象。实验处理过程和结果如图4所示。其中,图4a)为相机拍摄的原始图像;图4b)为截取的目标区域;图4c)为目标区域的HSI彩色图像;图4d)为图4c)的S分量图;图4e)为图4d)二值化结果;图4f)为图4e)形态学运算结果;图4g)是使用本文方法获取的导航点;图4h)是使用不同算法拟合导航线的结果表1为使用本文方法求得的导航点坐标;表2为不同算法拟合导航线所用时间;表3为不同算法拟合导航路径的参数,k为斜率,b为截距。
由图4a)可知,在道路两边种植有很多不同种类的植物,如果将拍摄的整幅图像作为研究对象,那么不可能将道路信息从植物中分割出来;由图4b)可知,截取的目标区域中干扰较少,这在一定程度上提高了导航路径的提取精度;由图4e)和图4f)对比可知,通过形态学运算可以很好地填充二值图像的孔洞;由图4g)可知,虽然本文通过形态学运算消除了一些孔洞,但是仍然存在一些较大的孔洞,导致导航点中存在极大偏差点;由图4h)可知,本文改进Hough变换拟合的导航路径精度要高于最小二乘法拟合的导航路径。由表2可知,本文改进Hough变换在实时性上要优于传统Hough变换。
图5是实验平台在同一路段行走时使用本文方法拟合的导航路径。由图5可知,本文改进的Hough变换在道路情况较为复杂时,也可以准确地提取导航路径。
4 结 论
本文针对公园绿篱修剪机器人车载部分自动导航的问题,在传统Hough变换的基础上提出一种初始点Hough变换来拟合公园道路的导航路径。通过不同算法对比和实车试验,得到以下结论:
1) 截取图像的部分区域作为目标区域,可以有效地减少干扰和计算量。本文通过350组实验确定截取拍摄图像的最后101像素行作为目标区域,可以有效地减少不同种类植株对图像分割的影响,使道路信息可以很好地分割出来。
2) 将RGB图像转换为HSI图像可以有效地减小光照不均匀对导航路径提取的影响。
3) 改进的初始点Hough变换可以准确地提取机器人行走的导航路径。在传统Hough变换的基础上,通过限制遍历角度范围和交点检测范围,改进Hough变换,经过不同算法的对比,本文改进算法在精度上要高于最小二乘法,在实时性上要优于传统Hough变换。
参考文献
[1] 于笑寒,李玲蔚,许锡锋.低碳风景园林营造的功能特点及要则分析[J].现代园艺,2018(17):150?151.
[2] DZHAMBOV Angel, DIMITROVA Donka. Urban green spaces' effectiveness as a psychological buffer for the negative health impact of noise pollution: a systematic review [J]. Noise health, 2014, 16(70): 157?165.
[3] FAN Yang, ZHI Yibao, ZHU Junzhu. An assessment of psychological noise reduction by landscape plants [J]. International journal of environmental research & public health, 2011, 8(4): 1032?1048.
[4] MA Ben, ZHOU Tiantian, LEI Shuo, et al. Effects of urban green spaces on residentswell?being [J]. Environment, development and sustainability, 2019, 21(6): 2793?2809.
[5] GARC?A?SANTILL?N I, PELUFFO?ORDO?EZ D, CARANQUI V, et al. Computer vision?based method for automatic detection of crop rows in potato fields [C]// International Conference on Information Theoretic Security. Cham: Springer, 2018: 355?366.
[6] JI Ronghua, QI Lijun. Crop?row detection algorithm based on random Hough transformation [J]. Math computer model, 2010, 54(3): 1016?1020.
[7] 李云伍,徐俊杰,王铭枫,等.丘陵山区田间道路自主行驶转运车及其视觉导航系统研制[J].农业工程学报,2019,35(1):52?61.
[8] WU J, DENG M W, FU L L, et al. Vanishing point conducted diffusion for crop rows detection [C] // International Conference on Intelligent and Interactive Systems and Applications. Cham: Springer, 2018: 404?416.
[9] 陈诚.基于神经网络的智能车辆导航路径识别模型[J].现代电子技术,2018,41(11):124?128.
[10] ZHANG Xiya, LI Xiaona, ZHANG Baohua, et al. Automated robust crop?row detection in maize fields based on position clustering algorithm and shortest path method [J]. Computers and electronics in agriculture, 2018, 154: 165?175.
[11] 宋宇,刘永博,刘路,等.基于机器视觉的玉米根茎导航基准线提取方法[J].农业机械学报,2017,48(2):38?44.
[12] 刁智华,赵明珍,宋寅卯,等.基于机器视觉的玉米精准施药系统作物行识别算法及系统实现[J].农业工程学报,2015,31(7):47?52.
[13] JIANG Guoquan, WANG Zhiheng, LIU Hongmin. Automatic detection of crop rows based on multi?rois [J]. Expert system with application, 2015, 42(5): 2429?2441.
作者简介:陈继清(1984—),男,广西玉林人,博士,讲师,研究方向为机器人运动控制、机器视觉、特种机器人系统。
强 虎(1995—),男,山西大同人,硕士研究生,研究方向为机器视觉。
徐关文(1995—),男,广西岑溪人,硕士研究生,研究方向为仿生视觉。
