基于三方演化博弈的共享停车产业推广研究
2020-12-28王洪飞
王洪飞
(上海大学 管理学院,上海 200444)
目前鲜有学者基于三方演化博弈理论,探讨三方利益主体在共享停车产业推广过程中的策略选择与协同关系。因此,本文借鉴汽车共享中三方演化博弈研究思路,基于三方演化博弈理论,构建政府、企业和停车位拥有者三方演化博弈的共享停车产业推广模型,并利用MATLAB(2016b)对模型进行仿真,分析三方主体的演化路径及不同策略选择对共享停车产业推广的影响,并依据仿真演化结果给出相应的建议。
1 三方演化博弈模型
1.1 演化模型基本假设
假设一:本文将政府、企业和停车位拥有者三方均视为有限理性主体,具有自主学习能力,在共享停车产业推广过程中,最终达到演化博弈的稳定状态。停车位拥有者指居住区停车场、公共停车场和独立的私家车位等停车设施。
假设二:政府有“激励”和“不激励”两种策略,概率分别为x和1-x,政府在选择“激励”策略时会付出一定的工作成本C,由于政府有效的管理,各个利益主体对政府予以肯定,获得一定效益U,如政府形象、公信度提升等。在企业创建共享停车平台后,政府会给予创建共享停车平台的企业一定补贴N,在停车位拥有者选择“提供”停车位时,政府将获得一定环境收益H,并且对停车位供应者给予一定补贴M。在企业未创建共享停车平台或停车位拥有者未提供停车位时,政府需付出一定治理成本L,如汽车巡位时间过长造成的交通拥堵、环境污染等。
假设三:运营企业有“创建”和“不创建”共享停车平台两种策略,概率分别为y和1-y,企业在选择“创建”共享停车平台时将付出运营成本O,驾驶者将会支付一定使用成本即运营收益F,其中运营企业的直接收益在运营收益F中的比例为α,将其余收益(1-α)F转移给停车位拥有者的供应者,政府给予一定补贴N,同时获得一定潜在收益Q,如企业形象提升、政府税收贷款等政策支持。若企业选择“不创建”共享停车平台,则企业没有运营成本与运营收益。
假设四:停车位拥有者有“提供”和“不提供”停车位两种策略,概率分别为z和1-z,停车位拥有者选择“提供”停车位时获得一定收益(1-α)F,获得政府补贴M。若停车位供应者选择“不提供”停车位则不会获得收益与政府补贴。
1.2 演化博弈模型的构建
基于上述假设和定义,构建三方演化博弈模型,得出三方的收益矩阵,如表1和表2所示。
政府选择“激励”和“不激励”策略的期望收益分别为

表1 政府采取激励策略下三方博弈的收益矩阵
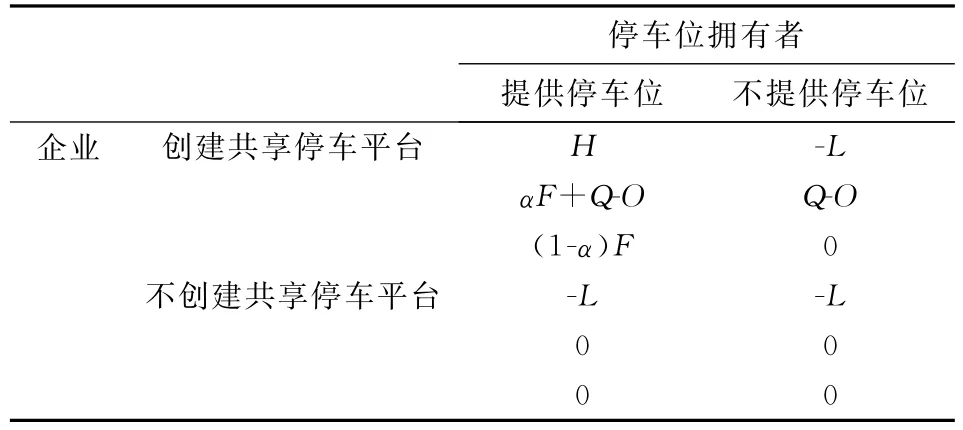
表2 政府采取不激励策略下三方博弈的收益矩阵
政府策略的复制动态方程为

企业选择“创建”和“不创建”策略的期望收益分别为

企业策略的复制动态方程为

停车位拥有者选择“提供”和“不提供”策略的期望收益分别为

停车位拥有者策略的复制动态方程为

由此,可得政府、企业和停车位拥有者的复制动力系统:

2 模型的演化及稳定性分析
2.1 基于复制动态方程的稳定性分析
由演化博弈相关理论可知,当F’(x)<0,F’(y)<0,F’(z)<0时,策略x、y、z代表政府、企业和停车位拥有者的三方博弈稳定策略(ESS)(2019)。
政府策略的复制动态方程为

对其求导得F’(x)=(1-2x)(-y N-z M+U-C)
(1)当y=[-z M+U-C]/N时,则F(x)0,表明x无论取何值,政府策略均为稳定状态。
(2)当y≠[-z M+U-C]/N时,令F(x)=0,得x=0、x=1是政府策略复制动态方程的两个稳定点,此时有两种情况:
a.若-y N-z M+U-C>0,则有F’(x)|x=0>0,F’(x)|x=1<0,表明政府选择激励策略是稳定状态,选择不激励策略是不稳定状态。
b.若-y N-z M+U-C<0,则有F’(x)|x=0<0,F’(x)|x=1>0,表明政府选择不激励策略是稳定状态,选择激励策略是不稳定状态。
(3)当0<x<1时,F(x)>0,政府稳定性的演化相位图取决于直线-y N-z M+U-C的形态。
同理,可分析企业和停车位拥有者策略的稳定性。
2.2 演化博弈的渐进稳定性分析
令F(x)=0,F(y)=0,F(z)=0,可求得8个特殊均衡点,为E1[0,0,0]、E2[1,0,0]、E3[0,1,0]、E4[0,0,1]、E5[1,1,0]、E6[1,0,1]、E7[0,1,1]、E8[1,1,1]。桑培东(2019)认为当y=0时,即企业选择不创建共享停车平台,未考虑共享停车平台的推广问题,因此不需考虑E1,E2,E4,E6。同时由李雅普诺夫稳定性相关理论(2010)可知,依据演化博弈系统的雅克比矩阵的特征值可分析其渐进稳定性,即满足特征值均小于零。其雅克比矩阵为

将E3、E5、E7、E8四个均衡点分别代入雅可比矩阵,求得所对应的特征值,并判断特征值的正负及渐进稳定状态,“e”表示不确定,如表3所示。
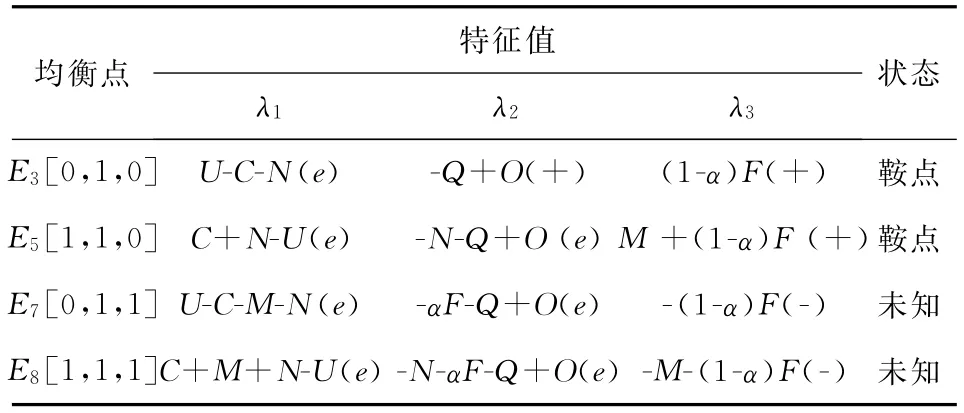
表3 雅克比矩阵的均衡点及特征值
要使均衡点为演化稳定点,需符合李雅普诺夫稳定性理论,即所有特征值均小于零。从表3中可知,均衡点E3[0,1,0]、E5[1,1,0]的特征值λ3>0,因此均为鞍点。假设均衡点E7[0,1,1]的雅克比矩阵特征值满足U-C-M-N<0、-αF-Q+O<0、-(1-α)F<0时,E7为复制动态系统的稳定平衡点,但λ1<0成立情境下不符合正常的市场车位拥有者的积极配合和相互监督,三方相互协同,使之短期内有效推动共享停车发展,最终促使系统收敛于演化稳定状态。当均衡点E8[1,1,1]特征值满足C+M+N-U<0、-N-αF-Q+O<0、-M-(1-α)F<0时,E8[1,1,1]为系统的稳定平衡点,在演化博弈过程中,以政府管理为主导,企业与停车位拥有者的策略组合最终会收敛于最优稳定策略。
3 数值分析
为了更好地分析政府、企业和停车位拥有者三方演化轨迹,判断哪些因素对演化稳定状态的收敛有影响,运用MATLAB(2016b)对三方演化博弈模型进行仿真,并对三方主体初始参与意愿、成本、收益和政府补贴额度进行分析。
由上述分析可知,参数初始值设置需达到最优演化稳定点E8[1,1,1],即需满足C+M+N-U<0、-N-αF-Q+O<0、-M-(1-α)F<0,故设定参数值为M=1,N=4,G=16,C=8,Q=6,O=12,F=20,a=0.5。
3.1 三方主体不同参与意愿的仿真分析
在其他参数不变的情况下,设定政府、企业和停车位拥有者三方初始参与意愿相等,对三方不同参与意愿变化下的策略选择进行仿真。由图1可知,三方初始参与意愿无论处于何种状态,x、y、z均会收敛于1,最终达到稳定状态(1,1,1)。增大政府初始参与意愿概率,x收敛于1的速度变慢,在三方初始参与概率为0.2时,y值演化过程中出现先变小后增大的情形,z值收敛于1的速率也由小变大。
设置政府初始参与概率值x=0.5,对随机改变y和z初始值时x值的演化进行仿真。如图2所示,在一定条件下,变动y和z值会在一定程度上影响x收敛速度,最终x均收敛于1且单调递增。结果表明,改变y和z值并不会改变政府策略演化结果,政府最终会选择“激励”策略。

图1 参与概率μ、ν和θ同时变化的演化结果图

图2 y和z变化时x值演化仿真图
设置企业初始参与概率值y=0.5,对随机改变x和z初始值时y值的演化进行仿真分析。如图3所示,y收敛速度受x和z初始值变化的影响,当x和z初始值低于某临界值时,y出现缓慢减小趋势,随演化过程的推进,最终y收敛于1,即企业最终会选择“创建共享停车平台”策略。
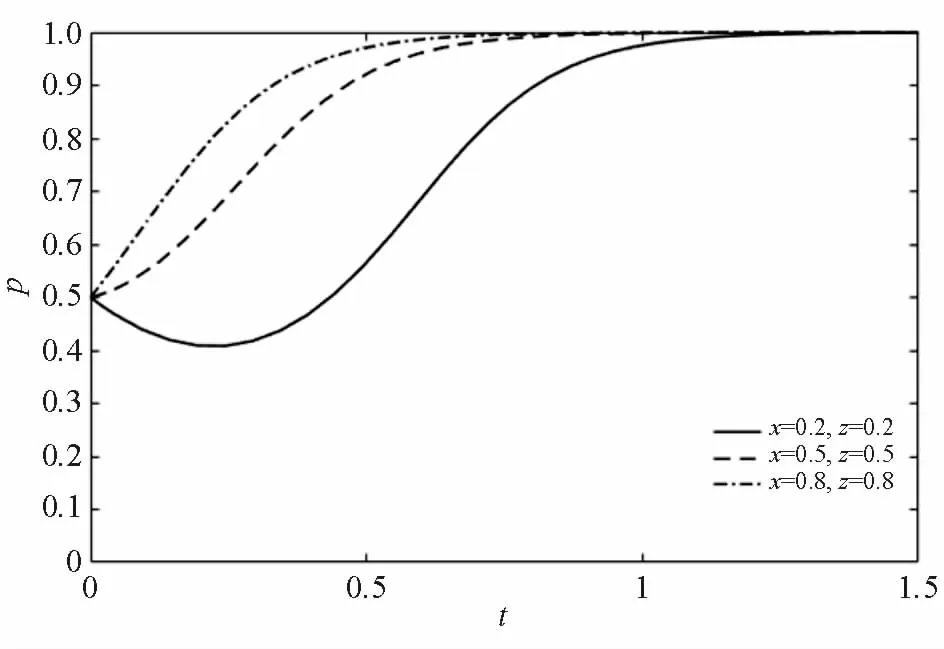
图3 x和z变化时y值演化仿真图
固定停车位拥有者初始参与概率值z=0.5,对随机改变x和y初始值时z值的演化进行仿真。如图4所示,x和y初始值变化会影响z收敛速度,当x和y初始值低于某临界值时,z收敛于1的速度缓慢下降,但停车位拥有者经一段时间演化后最终仍选择“提供停车位”策略。
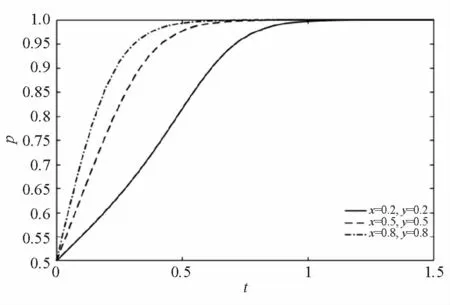
图4 x和y变化时z值演化仿真图
3.2 成本对演化的影响
3.2.1 政府成本变化的仿真
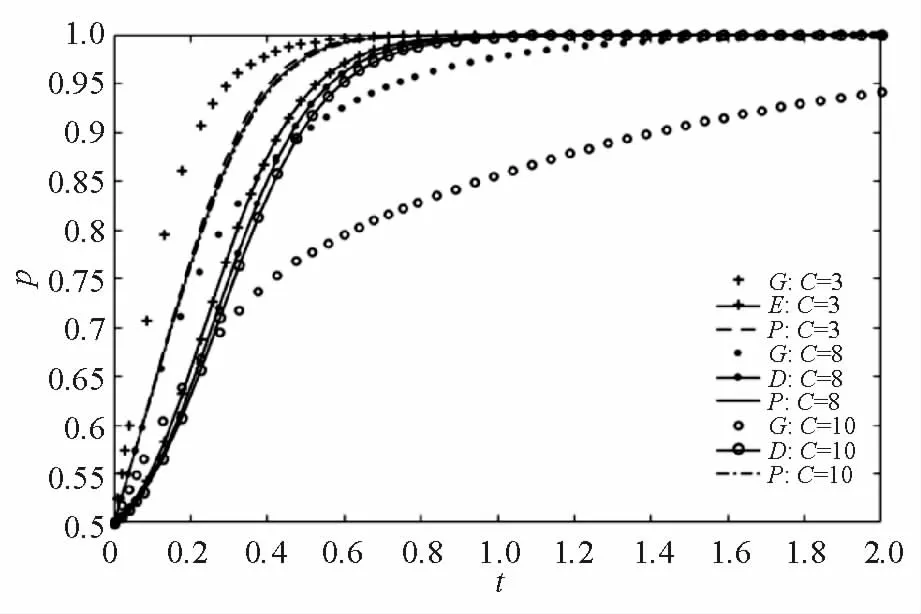
图5 政府成本变化仿真图
固定其他参数值,变动政府选择“激励”策略所支付工作成本C,并对该条件下三方策略演化进行仿真。由图5可知,x和C成负相关,受政府策略演化的影响,企业与停车位拥有者策略选择与C同样成负相关,且企业受政府“激励”策略选择影响较大,同时缩小C能加快x的收敛速度,而对企业和停车位拥有者参与意愿影响较小。仿真结果表明,政府支付成本过高对政府“激励”策略选择具有一定消极作用。
3.2.2 企业运营成本变化仿真
固定其他参数值,企业选择“创建共享停车平台”策略时运营成本O变化对三方主体策略选择演化影响的仿真。由图6所示,y和O负相关,受企业策略演化的影响,z与O同样成负相关,但x与O成正相关,同时增大O能有效降低y的收敛速度。仿真结果表明,运营成本过高会阻碍企业选择“创建共享停车平台”策略的积极性。
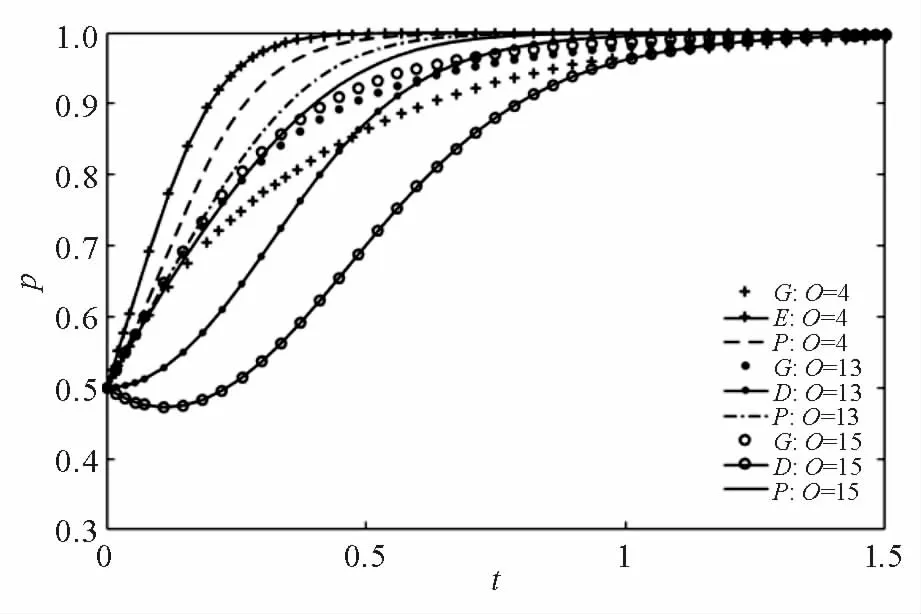
图6 企业运营成本变化仿真图
3.3 收益对演化的影响
3.3.1 政府收益变化的仿真
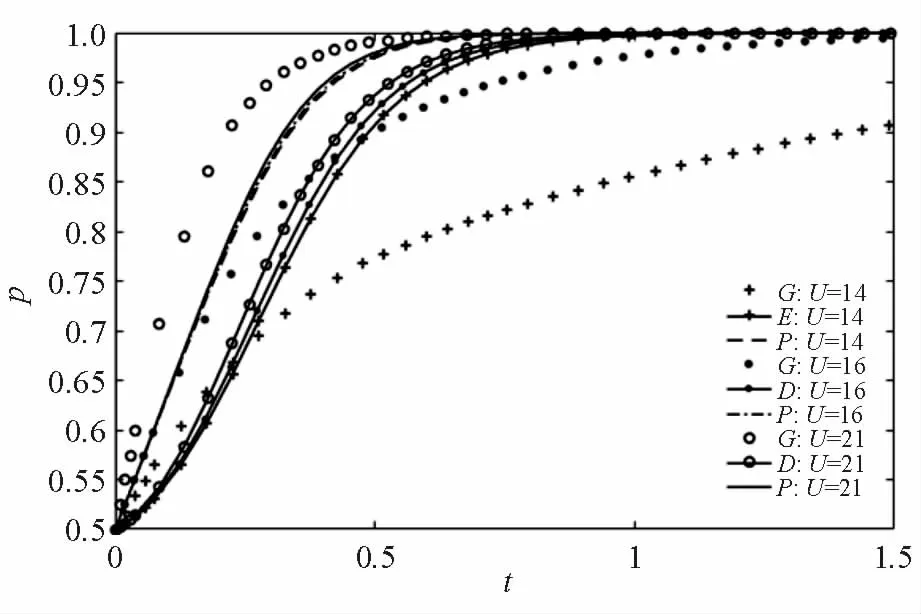
图7 政府收益变化仿真图
固定其他参数值,改变政府实施激励策略可获得的效益U,并对三方主体参与意愿演化进行仿真分析。由图7可知,增大政府实施激励策略获得的效益U,可加快x的收敛速度,同时对y的收敛速度有一定影响,但对z影响不明显,x、y和z最终均收敛于1。仿真结果表明,效益变化对政府参与意愿的选择具有显著影响,同时带动企业和停车位拥有者参与意愿发生变化,其中对企业的间接影响更为明显。
3.3.2 企业潜在收益变化的仿真

图8 企业潜在收益变化仿真图
固定其他参数值,改变企业选择“创建共享停车平台”策略可获得的潜在收益Q,并对三方主体参与意愿演化进行仿真分析。由图8可知,改变Q会对x、y和z的收敛速度有一定影响,其中y、z与Q成正相关,x和Q成负相关,且x、y和z最终均收敛于1。仿真结果表明,增大企业潜在收益能有效提升企业选择“创建共享停车平台”策略的意愿,但潜在收益高于某临界值时会降低政府选择“激励”策略的意愿。
3.3.3 收益占比变化的仿真

图9 收益占比α变化仿真图
固定其他参数值,企业与停车位拥有者收益分配系数变动对共享停车产业推广进行演化仿真分析。由图9可知,收益分配系数α的临界值之一为0~0.3,当α低于该临界值时,y明显下降,z小幅上升。当α高于某临界值时,y收敛于1的速度加快,z收敛速度明显降低。由仿真结果可知,x与α成负相关,α变动会对企业和停车位拥有者的策略选择产生一定影响,且企业对收益分配多少更加敏感。
3.4 政府补贴额度对演化的影响
固定其他参数值,验证政府补贴额度变化对三方意愿演化的影响。由图10可知,政府给予选择“创建共享停车平台”策略的企业补贴额度变动对三方策略选择有一定影响,增大N可加快y收敛速度,但对x有一定阻碍作用,对z影响较小。由图11可知,停车位拥有者选择“提供停车位”策略的意愿z与政府给予停车位拥有者的补贴额度M成正相关,但x与M成负相关。仿真结果表明,增大N或M均可促进y与z的收敛速度,但过量增大补贴额度会对政府选择“激励”策略有明显的阻碍作用。
4 结语
本文依据动态博弈理论,构建政府、企业和停车位拥有者三方演化博弈的共享停车产业推广模型,并利用MATLAB(2016b)对模型进行仿真,分析三方主体的演化路径,并从成本、收益和补贴额度等方面探究了三方行为决策对共享停车产业推广的影响。由仿真分析可知,政府、企业和停车位拥有者三方策略选择行为彼此相互影响;政府收益与成本变化对政府激励策略选择的影响较大,并能间接影响其他两方的策略选择行为;企业和停车位拥有者的策略选择受收益分配系数变动的影响;减少企业运营成本和增大潜在收益在一定程度上可增加企业选择“创建共享停车平台”策略的比例;直接效益占比多少对企业和停车位拥有者决策行为作用相反;政府对企业和停车位拥有者的补贴所产生的激励作用具有一定的变化特点。
图10 政府给予企业的补贴额度N变化仿真图
图11 政府给予停车位拥有者的补贴额度M变化仿真图
共享停车虽作为一种新型停车模式,但能够有效解决当下出行者停车难问题,这是共享停车得以较快推广的重要因素。上述分析表明,共享停车产业的发展离不开政府、企业和停车位拥有者三方主体的相互促进与激励。其一,政府应充分发挥自身引导与激励作用,对共享停车产业进行有力扶持,通过媒体等方式对其优势开展大力宣传。其二,政府需合理设置补贴额度,完备对企业和停车位拥有者的补贴激励机制。其三,目前我国共享停车产业正处于起步阶段,企业对共享停车产业的运营模式依旧需要持续创新与完备,同时停车位拥有者对共享停车产业认识不足,此外车主尚不完全了解其优势,使得共享停车产业的推广受到限制。其四,从绿色可持续角度看,共享停车产业将带来较大的经济与环境效益,企业要明确共享停车的优势与不足,趋利避害,在共享停车产业进行业务拓展,承担社会相关责任,增加自身潜在收益。其五,停车位拥有者要注重提高社会责任意识,做到资源利用与自身利益最大化,增强自身主导意识。其六,合理设置共享停车位价格,平衡运营企业、停车位拥有者双方收益,并使之满足车主的心理承受支付成本。
