排水管道检测与缺陷识别技术综述
2020-12-28王俊岭邓玉莲张现国
王俊岭, 邓玉莲, 李 英, 张现国
(1.北京建筑大学, 城市雨水系统与水环境教育部重点实验室, 北京 100032; 2.北京首创股份有限公司, 北京 100032)
城市排水系统作为市政基础设施的重要环节,是维持城市环境清洁卫生的重要保障。近年来,由于城市化进程的不断加快,城市不透水铺装覆盖率显著增加[1],加上气候条件的变化,导致城市雨洪灾害频发[2]。研究发现,城市内涝不仅由极端天气和日益增长的城市化进程引起,也可由设备故障,管道堵塞与腐蚀等内部原因引起[3-6]。大多数城市的市政排水管道已有几十年的历史,有些管道的使用年限甚至超过百年[7]。随着管道使用年限的增长,管段呈现出一些缺陷,例如管道变形、堵塞、渗漏、坍塌等。在设计施工方面,部分管道存在混接、错接、管径偏小、高程设计不合理等一系列问题,使排水管网不能满足预期的要求[8]。高原等[9]在研究美国旱季合流制排水系统沉积规律时发现,水流中5%~30%的固体物质将沉积在管底。谭合等[10]在对湖北某开发区雨、污水收集设施的现状进行调研时发现,雨污分流接管错误的现象比较严重。上海某区2011年排水管道检测结果显示,中度淤积以上的管道占总管道长度的18.45%,平均每1 km就有1处破裂、渗漏等结构性病害[11]。此外,由于管道堵塞或淤积,使得管道中的污、废水溢出,污染地下水及地表水源。Ashley等[12]发现强降雨时受纳水体污染负荷的30%~80%都来源于溢流排放的管道。因此,有必要对排水管网进行全面和定期的检测,了解排水管道的状况,将有助于管理部门确定及时、适当和经济的维护工作。
截至目前,排水管道的状况评估一直受到现有检测技术的限制。缺乏定期的检测或检测周期延误都会对排水管道的管理与维护造成很多问题[13]。美国环保局已要求市政当局评估其污水收集系统的状况,以便更好地了解排水系统的状态和制定维护决策[14]。为了更加科学而全面地评估排水管道的状况,许多检测技术被提出并应运于排水管道的缺陷检测中。但排水管道内部状况极为复杂,且检测技术受到管材、技术要求、时间成本和劳动力成本的限制,这使得排水管道的检测并不是一项容易的工作。为了全面了解排水管道的检测技术,结合中外研究文献,综述了闭路电视(closed-circuit television, CCTV)检测技术、激光检测技术、潜望镜检测技术、红外热成像技术、超声波检测技术及探地雷达检测技术的应用和特点,介绍和分析了计算机视觉和深度学习等图像处理技术在排水管道缺陷自动化检测方面的应用,并对未来排水管道检测技术的发展前景进行了展望。
1 排水管道检测技术
1.1 CCTV检测技术
CCTV检测已成为污水管道检测中应用最广泛的技术手段,该技术出现于20世纪50年代,并在20世纪90年代引入中国[15]。CCTV检测是通过一个带摄像机的机器人系统拍摄管道内部信息,并通过多芯电缆将数据传输给远程操作人员[16],收集的视频和图像资料提供了非常丰富的管道状况信息,这些影像资料由受过培训的专业人员进行判读,对管道缺陷进行分类和等级评定。目前,CCTV检测系统可以与地理信息系统和资产管理系统联系起来,有助于更新管道的尺寸、连接性、管道材料等信息,并对管网的总体状况进行分析,帮助确定未来的更新和维护方案。
CCTV检测技术已经普遍用于管道状态检测,贯穿于管道施工、验收、运营等各个阶段,可用于雨水管道、污水管道、检查井等的检测[17]。雷芳芳[18]总结了CCTV检测技术在福州市排水管道检测中的应用,发现该技术能够检测到排水管道的破裂、渗漏、变形等结构性缺陷和树根、沉积、结垢等功能性缺陷。但CCTV检测不能提供任何关于管壁结构完整性或周围土壤的信息[19]。肖倩等[20]在分析深圳市排水管道CCTV检测评估时提出,该技术无法检测出被水和淤泥覆盖的地方,检测开始之前,需要对排水管道进行必要的封堵,抽水和清洗工作,确保管内积水、积泥均不大于管道直径的20%,且水位、淤泥厚度均小于200 mm。CCTV收集到的影像资料的质量及评估的准确性,在很大程度上取决于摄像机的规格、拍摄方向和位置,以及下水道的光照条件和背景噪声[21]。基于拍摄图片和视频的质量,一些微小裂缝并不能被判读人员捕捉到[22]。冯成会等[23]在介绍CCTV检测与评估技术在水库排水涵管检测中的应用中发现,人工缺陷判读过程复杂,工作量大且容易出错。Wirahadikusumah等[24]也指出这种缺陷检测与判读实践的准确性很大程度上会受到工作人员的经验和技能水平的影响。
1.2 激光检测技术

激光检测技术主要用于检测管道的几何形变、表面裂纹、断裂等结构性缺陷,能够相对准确地定位管线和识别管道缺陷的基本形状[29-30]。刘滔滔等[31]利用激光光斑位敏技术来检测地下管线的位置分布及弯曲变化,具有精度高、响应灵敏等优点。杜文浩等[32]将激光检测技术应用于某一市政排水管道的缺陷检测,发现激光检测方法可以有效地检测管道淤积和变形的问题,但管道底部起伏会对检测结果造成一定的影响。激光传感器在完全黑暗的环境中工作效率最高,因为黑暗条件下激光束可以保持较高的对比度,但也为操作人员操纵和控制机器带来了困难。在黑暗环境中,一些微小裂缝很容易被忽略,而且激光检测不到水的流入或流出。此外,表面粗糙度会降低光信号,从而影响检测结果。
1.3 潜望镜检测技术
潜望镜检测技术又称QV(quick view)检测,是一种快速检测技术。QV检测是利用可调节长度的操作杆携带高清探头放入检查井中,通过变焦和俯仰调节功能,能够清晰的捕捉管道内部信息并形成录像。QV检测的探测距离较短,且不能检测水面以下的管道状况,但可以识别排水管道水面以上的大部分缺陷。娄继琛等[33]通过分析佛山某城镇排水管段的QV检测资料,发现该技术能够准确地判断管道材质缺陷、腐蚀程度及具体位置。孙乐乐等[34]分析QV检测用于云南某自然村的检查井溢流现象时也发现QV检测可以识别出管道裂缝、变形、沉积等缺陷,是一种高效、直观、可量化的管道检测技术。在实际应用中,QV检测多与CCTV检测技术配合使用,用于检测短距离管道或独立的检查井等管道附属构筑物。
1.4 红外热成像技术
红外热成像检测技术是利用管道内的红外线源和红外线扫描器来产生管道的温度图,因此,它主要根据管道的内表面温度来收集缺陷信息[35]。由于管道周围土壤的绝缘性产生了温度梯度差,所以需要与精密红外探测器配合使用[36]。红外热成像技术是一种表面检测技术,随着缺陷深度的增加,检测的有效性会降低[37]。
红外热成像技术可以检测管道的裂缝和孔洞等缺陷,并可以实现缺陷的定位。Park等[38]将红外热成像技术用于冷却管道的缺陷检测,发现该技术可以在管道的裂缝处形成热点,从而识别和定位裂缝缺陷。由于红外线可以探测到物体的特征信息,可被用来检测管道的材质、内衬等信息。黄启人等[39]在研究压力容器和压力管道的红外热成像检测时发现,该技术能够快速筛查被检测设备的外部绝热层、内部隔热衬里或设备母材等质量情况。利用红外热成像技术检测管道时,红外线源会使管道内的温度升高,由于排水管道内物质较为复杂,管道温度升高容易引发管道事故。此外,红外热成像法也不能提供与水流有关的信息。
1.5 超声波检测技术
超声波检测通过产生高频,短波长的超声波脉冲来检测管道缺陷,管道材料与缺陷之间存在声学上的差异,通过观察反射波的波形特征可以判断管道缺陷的尺寸和形状[40]。在同一介质中,脉冲波的传播时间与传播路程成正比,因此可以通过反射信号产生和接收的时间差来确定缺陷的位置[41]。与激光检测一样,当检测物表面较粗糙时,反射波信号就会被减弱,从而影响检测结果[42]。早在2007年,Bo等[43]就提出了一种用于管道的超声波在线检测系统。2010年,夏娟等[44]设计了排水管道超声波数据采集系统,用以检测排水管道内壁淤积和损伤问题。
超声波检测技术主要被用来检测压力管道的焊缝问题,一些学者提出此方法也可以用来检测排水管道的缺陷。滕启斯[45]将超声波周向扫描检测技术应用于排水管道的内壁检测,通过实验发现在检测管道堵塞和破裂时效果较好。陈高泉[46]设计了一种超声波成像检测系统,将其用来检测排水管道的垃圾淤积含量和内壁磨损。魏效国等[47]也对超声波排水管道的检测做了可行性研究。超声波检测系统可以将传感器浸入水中进行检测,不需要排干管道中的水,可以检测管道内的腐蚀及沉淀情况[47]。超声波工具在管道中采集到的超声波信号通常是有噪声的,需要有效的去噪技术来获得关于缺陷的准确信息。超声波信号的主要处理方法有小波变换[48]、卷积神经网络[49]、快速傅里叶变换等。此外,超声波传感器体积比较大,不适用于小管道的检测。
1.6 探地雷达检测技术
探地雷达是利用电磁穿透地面,探测埋在地下的管道和周围土层。携带雷达的移动电台沿着排水管网移动,利用不同频率的天线收集反射信号,然后将不同位置的观测值连接起来,就可以生成管道和周围土壤的图像。探地雷达检测需要合适的工作频率来探测不同的目标,探测深度与波长呈正相关,但波长太大,分辨率就会降低,因此需要在分辨率和穿透深度之间权衡取舍[36]。
探地雷达是一种无损检测技术,主要用于浅层地下管线的普查,可以探查排水管道是否存在暗管和暗沟问题。郑雷雷等[50]在分析某一经济开发区采用探地雷达技术探测污水管道时发现,此技术能够成功用于城市地下管道线的探测,具有高效、无损、分辨率高等优势。除此之外,探地雷达技术还可以检测管道周围土质,判断管道是否存在坍塌隐患[51]。崔英良等[52]分析CCTV和探地雷达技术探测合肥市某一管段的健康状况时发现,依据探地雷达技术可以判断管道周围土质是否为疏松体,还能判断出分管道破裂引起的空洞体。探地雷达技术适用于砖砌排水管、输水渠和小管径的排水管线的检测[53]。由于制造污水管的黏土、混凝土和塑料等材料的相对介电常数接近空气,这就导致探地雷达技术在检测此类管道时有难度。
1.7 其他检测方法
除了上述传统的CCTV检测等单传感器检测技术外,研究人员还开发了多种智能排水管道检测系统,将多种不同的检测技术融合到检测平台中[54]。20世纪90年代,澳大利亚开发了一种名为KARO的德国机器人系统和管道检测实时评估技术(pipeline inspection rapid assessment techniques, PIRAT)[55]。下水道扫描仪和评价技术(the sewer scanner and evalu-ation technology, SSET) 作为最新的多感官检测系统已经在美国进行了现场测试[56],与传统的CCTV检测相比,SSET改善了图像质量,使得自动缺陷分类的研究得到了改进。然而,由于SSET检测成本较高、检测时间较长,并没有被大多数的政府部门采用[57]。
基于对CCTV检测和多传感器管道检测系统(KARO、PIRAT)的改进,目前外国正在开发的机器人产品和技术可以获得更全面,高质量的数据信息。RedZone Robotics Inc公司已经开发了配备多个传感器的机器人下水道检查平台,包括数字多频分析声纳、旋转式激光扫描仪、气体监测仪、流量监控器、具有高分辨率的360°数字虚拟电视设备和位置传感器[58]。另一个创新的检测平台称为自动检测移动平台,集成了全球面摄像头和激光扫描仪,可用于检测直径为152.2~457.2 mm的小直径管道,并获得独立于人类操作员的数据[59]。
从上述几种排水管道检测技术的分析中可以发现,虽然可用于排水管道的检测技术有很多,但大都存在一些缺陷,如劳动负荷大、检测成本高、检测结果不准确和检测不全面等。表1对上述检测技术做了总结。在实际应用中,可以根据不同的需求有针对性地选择检测方法。
2 管道缺陷分析技术
随着CCTV机器人、QV等基础设施视觉检测技术的广泛发展和应用,在检测过程中会产生大量的检测图像或视频,用人工来分类和判读这些影像资料,效率低且不准确。目前,很多研究学者基于计算机视觉和图像处理技术提出了自动化缺陷判读技术,尤其是最新提出的深度学习技术,在管道缺陷识别及分析方面具有较好的应用前景。
2.1 传统的计算机视觉和图像处理技术
计算机视觉是指计算机或机器像人类一样从数字图像中获取信息[60]。计算机视觉方法的应用一般包括图像预处理、图像分割、特征提取、目标识别和结构分析等[61-62]。传统的计算机视觉技术被用于CCTV图像的自动判读,这一过程需要大量的图像预处理和复杂特征提取器的设计,如对污水管道图像进行特征提取和分类[63-65]。闵令伟[66]利用CCTV检测系统和激光测距仪获取管道的状况信息,并利用三维重建算法检测圆柱形管道的缺陷。Huynh等[67]提出了一种基于三维立体视觉的污水管道检测系统,该方法通过标定、校正和对应,实现立体视觉,将双边缘评价的算法用于检测管道的微小裂缝,并采用约束滑动窗口算法提高搜索速度。
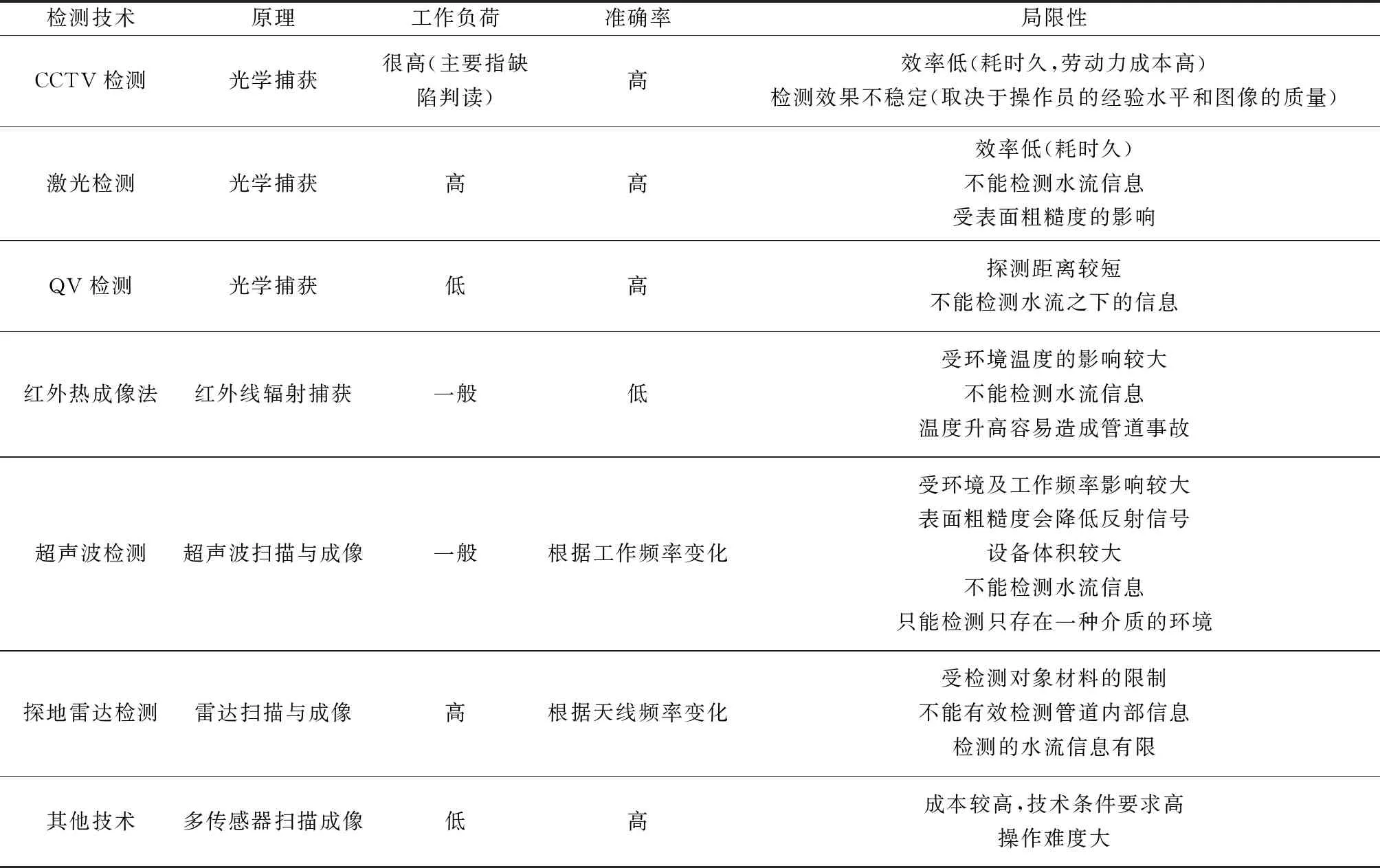
表1 排水管道检测技术
传统计算机视觉技术也遇到了很多问题,如低分辨率和噪声视频的处理,图像失真与结构运动[68]及光照和拍摄距离的影响[69]。在管道缺陷识别领域,传统的计算机视觉技术面临两个最主要的问题,其一是需要设计一个特定任务的复杂特征提取器;其二是在准备训练数据集时需要大量的图像预处理,训练过程烦琐。此外,目前的研究主要集中在识别和检索单个缺陷(如裂纹),对其他常见的缺陷(如树根入侵和渗透)的自动识别与定位的研究很有限。

图1 CNNs模型的架构图Fig.1 Architecture diagram of CNNs model
在处理污水管道检测的图像资料时,大多数方法都将这些图像资料分为包含缺陷和不包含缺陷两种类型,包含缺陷(如裂缝、变形、渗漏、树根入侵等)的图像区域叫作特征区域。在目前的研究中,对图像的分类是基于一种特征提取方法,即使用手动指定的像素特征(如边缘、梯度、纹理等)对图像进行分类。Xu等[70]开发了一个污水管道结构评估框架,此框架使用图像处理技术如边缘检测、二值图像阈值化、细化和离散傅里叶变换来提取节点结构并计算其形变。Yang等[71]以离散小波变换和共现矩阵作为图像分类的基础,使用支持向量机(support vector machines, SVM) 分类器对缺陷进行分类,在识别缺陷如脱节、沉积、破管和断裂的平均准确率为60%。Guo等[57]提出了一种基于变化检测的方法来自动识别管道检测视频中的特征区域,该方法对处理使用固定角度摄像机拍摄的清洁管壁表面的图像时效果最好,当不满足这一条件时,可能会产生大量的错误,大大增加处理时间。Halfawy等[72]提出了一种形态学方法,利用聚焦对象亮度的差异作为分割特征区域的基础,此方法使用有向梯度直方(histogram of oriented gradient, HOG)和SVM分类器,经过1 000幅图像的训练来识别特征区域。
基于形态学和特征提取的方法最主要的缺陷是限制了自动化系统的泛化能力。分类器的泛化能力是指对表现出显著变化的图像进行分类的能力(例如形状、颜色、纹理等)。形态学操作需要对训练图像进行反复的试验,通过手动来校准某些结构元素。因此,在特定条件下(如相机焦距、物体与相机之间的距离、镜头焦距、光照条件等)拍摄的训练图像的结构元素可能不适用于不同条件下拍摄的图像。此外,使用形态学方法识别污水道管道中的缺陷,容易产生错误,因为这些管道的内部表面颜色会因表面染色、管道的重新铺设、材料的变化等而发生变化。特征提取方法使用预先设计好的(或人工指定的)特征,在人脸检测、行人跟踪等模式识别领域效果良好,但如果用于测试的图像与用于培训的图像有显著差异,则使用特征提取方法对图像进行分类会导致准确率下降。
2.2 深度学习技术
近年来,出现了一种图像分类的深度学习算法,其中卷积神经网络(convolutional neural networks, CNNs)的应用最为广泛。CNNs模型通常是通过输入图像的卷积、激活和极化等网络层进行特征提取,然后通过完全连接层进行分类,之后输出每个类的预测分数。每个网络层有不同的功能,并使用前一层的结果作为输入端。CNNs的运行程序一般包括:①从原始图像中提取特征;②使用初始随机权重和偏差分配的过滤器来预测类别,将特征向前传递;③计算预测分数与真实值之间的误差;④通过反向传播不断调整滤波器的权值和偏置,最终得到最优类别。CNNs模型的架构如图1所示。
CNNs以数以万计的最优像素特征对图像进行分类,其分类精度和泛化能力明显高于其他方法[73]。CNNs的主要缺点是需要庞大的用于训练的图像数据库,但这个缺点可以通过已建立的具有详细注释的数据库解决。2014年,Krizhevsky等[74]训练了一个大型的深度卷积神经网络数据库ImageNet,将120×104幅高分辨率图像分类为1 000个不同的种类,准确率较高。CNNs的另一个缺点是训练过程较复杂,计算量大,这一过程可以通过使用图像处理单元进行并行计算解决。
与传统的计算机视觉和图像处理技术相比,CNNs是通过训练学习提取图像的特征,因此需要较少的图像预处理,不需要用专业人员设计复杂的特征提取器。近年来,CNNs在图像分类、目标识别和定位等方面具有良好的应用前景。Cha等[75]、Yokoyama等[76]提出了基于CNNs的混凝土裂缝检测方法,并证明了该模型相对于传统图像处理技术的优势。 此外,CNNs还被用于隧道高效检测[77]和道路裂缝检测[78]。Kumar等[79]提出了一种利用CNNs对下水道闭路电视图像中的多种缺陷进行分类的方法,并开发了一个模型系统来对根侵入体、沉积物和裂缝进行分类。然而,CNNs在管道检测方面的应用还处于初始阶段,使用CNNs进行排水管道缺陷检测的研究也很有限。
针对传统目标检测方法的不足,提出了基于区域的卷积神经网络(region-based convolutional neural network, R-CNN)。 R-CNN是通过对输入图像的选择性搜索来生成区域建议,然后将每个区域的建议图像输入到一个CNN模型来计算其特征,并通过支持向量机分类器计算类别分数,最后对分类后的图像进行边界回归,预测每个目标的位置。R-CNN的一个局限是多阶段的训练过程耗时较长且计算量大。另外,由于每个区域的建议都需要进行卷积、分类和回归,所以每个图像的检测速度都比较慢。为了解决R-CNN的局限性,Girshick[80]开发了快速区域卷积神经网络(Fast R-CNN)。与R-CNN相比,Fast R-CNN采用单阶段多任务排除的方式进行训练,大大减少了训练时间,且由于对原始图像只进行一次卷积处理,而不是对所有的区域建议进行卷积处理,因此检测速度更快,并且提高了检测精度。由于Fast R-CNN仍依赖于选择性搜索来生成区域建议,这将影响检测的准确性和速率,Ren等[81]提出了更快速区域卷积神经网络(Faster R-CNN)。Faster R-CNN是由一个区域建议网络(RPN)和一个Fast R-CNN检测器组成,RPN用于生成区域建议,Fast R-CNN检测器用于特征检测和边界回归。Faster R-CNN的主要特点是RPN和Fast R-CNN检测器可以共享卷积层,大大降低了计算成本。RPN生成的区域建议数量得到优化,质量优于选择性搜索生成的区域建议,从而提高了检测精度和速度。
与R-CNN和fast R-CNN相比,Faster R-CNN具有较高的精度和召回率,这对从CCTV影像中精确地检测管道缺陷是非常重要的。目前,Faster R-CNN主要应用于行人检测、人脸检测、实时车辆检测与跟踪和交通标志检测等领域。Cheng等[82]首次提出利用Faster R-CNN技术自动检测CCTV图像中的排水管道缺陷,并通过实验说明,该方法能够准确、快速、准确地检测出污水管道的缺陷。迄今为止,Faster R-CNN技术在管道缺陷检测方面的应用相对较少,但基于其良好的图像识别及分析能力,此项技术在管道缺陷自动化检测方面有着很好的应用前景。
3 结论与展望
CCTV管道机器人检测方法已经相对成熟,其后期图像资料的判读可以借助于计算机视觉和深度学习等图像处理技术。结合CCTV与自动化缺陷识别技术,将可能实现排水管道检测领域的全自动化,为排水管网资产管理与状态评估奠定坚实的基础,这也将成为排水管道检测领域的主要研究方向。
但目前管道缺陷的自动化缺陷识别仍处于发展阶段,技术还不是十分成熟。利用计算机视觉和深度学习等图像处理技术检测管道缺陷的准确性与前期训练模型的数据类型和参数息息相关,虽然已有一些建立好的数据库用于模型训练,但由于排水管道缺陷类型的相似性和复杂性,数据库仍然需要不断扩大和优化,建立全面的用于模型训练的数据库将是实现排水管网缺陷自动化检测的主要难点。此外,目前提出的自动化缺陷检测方法仅适用于静态图像的处理,考虑到大量检测视频的积累,在未来的研究中,对视频资料的转化和处理也将成为实现管道缺陷自动化检测的另一个重点和难点。
